인공 감각 피드백 (ASF)은 종종 손상된 감수 또는 다른 감각기구 보상 개인 실시간 생물학적 정보를 제공하는 사례로 정의 될 수있다. 개인 번 자율 신경계 (4)의 비자발적 반응이었다 물리적 프로세스를 제어 할 수 있도록, 3 – ASF 긴 신체 기능과 움직임 하나의 양태의 회수에 도움이 부상이나 장애인 재활의 영역에 이용되고있다. ASF, 생체 역학 바이오 피드백의 하위 범주는 운동의 균형 또는 보행에 관한 매개 변수를 측정하고,인가 된 자극의 일종을 통해 개인이 정보를 전달하는 외부 센서를 사용합니다. 생체 역학적 피드백에 점점 인기있는 방법은 공간과 시간적인 피드백을 제공하기 위해 신체의 다른 부분에 배치 작은 진동 모터, 또는 tactors를 사용한다. 이전 문헌 페이지를 보여왔다낮은 사지 절단, 전정 장애를 가진 개인에게 응용 프로그램에서 진동 촉각 피드백의 사용을 지원하는 결과를 romising 및 노화 관련 균형 (5)의 손실 – 9.
특정 자극에 개인의 인식과 반응을 제어하는 메커니즘에 대한 철저한 이해는 다른 응용 프로그램에 대한 ASF 시스템의 효과적인 이행을 알리는 필요합니다. 촉각 피드백, 이러한 메커니즘 중 최고는 감수하고 감각 반응 특별히 적용된 진동 사용자 감도 및 원하는 반응을 수행하는 데 필요한 시간이다. 진동 자극을 통해 연통 상관 감각 정보는 특정의 진동 주파수의 조합, 크기, 위치, 시퀀스로서 부호화되어야한다. 따라서, 촉각 ASF 시스템의 설계와 같이 자극의 사용자의 인식 및 해석을 최대화하는 파라미터들의 조합을 선택해야잘 적시성 그 결과 모터 응답의 정확도. 이 프로토콜의 목적은 다른 감각 장애 집단과 함께 사용 ASF 시스템의 설계에 알려 다양한 진동 자극에 대한 반응 시간 및 반응 정도를 평가에서 플랫폼을 제공하는 것이다.
방법은 여기에 설명 촉각 및 진동 촉각 피드백 -3,5,6-의 인간의 지각을 탐구하기 전에 연구를 기반으로, 2 개의 이전 연구 10, 11에 사용하기 위해 개발되었다. 후자의 두 연구는 두 변수가 상당히 결과 측정에 영향을 미치는 것으로 보여 낮은 사지 절단 수술의 정확도 및 사용자 응답의 적시성의 진동 주파수와 위치의 영향을 조사하기 위해,이 프로토콜을 이용하고, 반응 고정밀도가 될 수 있다는 달성했다. 이러한 결과는 향후 연구 및 촉각 ASF 시스템의 임상 적용에 tactors의 이상적인 위치를 알리기 위해 사용될 수있다. 에 의하여 다른 최근 연구크레아 외. (12)은 감지되는 진동 패턴의 변화가 아닌 모터 응답을 의미하는 언어 적 반응을 이용하여, 보행시 허벅지인가 진동 패턴의 변화에 대한 사용자의 민감도를 조사 하였다. 이러한 언어 응답이 검출 정확도를 측정 할 수 있지만, 그것들은 모터 제어 처리에 존재할 수있는 오류 및 지연을 고려하지 않는다.
이하의 실험에 대한 기본 설정은 펄스 폭 변조하는 마이크로 컨트롤러 보드의 출력 핀을 접속 진동 모터의 개수로 구성된다. 기판은 다시 시판 시스템 디자인 소프트웨어를 실행하는 컴퓨터의 범용 직렬 버스 (USB) 접속을 통해 제어된다. 모터는 충분한 전압을 보장하기 위해 추가로 증폭 회로를 필요로하며 현재의 진동 주파수의 넓은 범위에 걸쳐 공급된다. 예 증폭 회로는도 1에 도시되어있다. 바이폴라 접합 트랜지스터 (BJR) 도면에보다 효율적인 동작 및 작은 크기의 작은 금속 – 산화물 – 반도체 전계 효과 트랜지스터 (MOSFET)로 대체 될 수있다. 마찬가지로, 전체 증폭 회로는 추가적인 제어 및 감소 된 크기를 제공하는 상용 햅틱 모터 드라이버에 의해 대체 될 수있다. 각 모터는 자체의 회로를 필요로하고, 모터의 최대 열이 논문에 기재된 장치를 사용하여 단일 마이크로 컨트롤러 보드에 의해 제어 될 수있다.
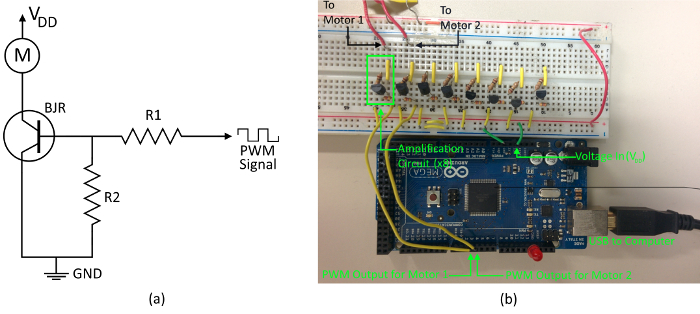
도 1 모터 배선. (A) 하나의 진동 모터를위한 증폭 회로가 도시되어있다. 각 모터는 별도의 회로를 필요로하며, 마이크로 컨트롤러 고유 PWM 출력 포트에 연결되어야한다. 은 V DD 여기서 마이크로 컨트롤러 보드에 의해 공급 된 3.3 V의 전원을 나타내고, 제로 전압 앱 인 경우 R2가 트랜지스터 스위치를 보장하기 위해 풀다운 저항 역할을하는 저항 열려거짓말. (B) 2 개의 모터의 물리적 인 배선의 일례. 여덟 개별 증폭 회로가 도시되었지만, 두 진동 모터에 접속되어있다. 이 프로토콜 R1 = 4.7 kΩ의 및 R2 = 100 kΩ의에서. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
