retroalimentación sensorial Artificial (ASF) se puede definir como la práctica de proporcionar información biológica en tiempo real a los individuos, a menudo la compensación de la propiocepción comprometida u otro mecanismo sensorial. ASF se ha utilizado durante mucho tiempo en el ámbito de la rehabilitación de las personas heridas o discapacitadas para ayudar en la recuperación de los aspectos de la función física y el movimiento de 1 – 3, lo que permite a las personas controlar los procesos físicos que una vez fueron una respuesta involuntaria del sistema nervioso autónomo 4. Una subcategoría de peste porcina africana, la biorretroalimentación biomecánico, utiliza sensores externos para medir parámetros relativos al equilibrio o de la marcha cinemática, y comunicar esta información a la persona a través de algún tipo de estímulo aplicado. Un enfoque cada vez más popular a la retroalimentación biomecánico emplea pequeños motores de vibración, o contactores, colocados en diferentes partes del cuerpo para proporcionar espacial, así como la retroalimentación temporal. La literatura previa ha mostrado promising resultados apoyan el uso de la retroalimentación vibrotáctil en las aplicaciones a las personas con amputaciones de miembros inferiores, alteraciones vestibulares, y el envejecimiento relacionada con la pérdida de equilibrio 5 – 9.
es necesario para informar a la aplicación efectiva de los sistemas de ASF para diferentes aplicaciones Una comprensión profunda de los mecanismos que controlan la percepción y la respuesta de un individuo a estímulos específicos. Para comentarios vibrotáctil, el principal de estos mecanismos son la propiocepción y la respuesta sensoriomotor, específicamente la sensibilidad del usuario a las vibraciones aplicadas y el tiempo necesario para ejecutar la reacción deseada. Cualquier información sensorial comunicada a través de estímulos de vibración debe ser codificada como combinaciones específicas de frecuencia de vibración, la amplitud, la ubicación y secuencia. Por lo tanto, el diseño de los sistemas de ASF vibrotactile debe seleccionar combinaciones de parámetros para maximizar la percepción del usuario y la interpretación de los estímulos, comoasí como la puntualidad y la exactitud de la respuesta motora resultante. El objetivo de este protocolo es proporcionar una plataforma desde la cual evaluar los tiempos de respuesta y la precisión de la respuesta a diversos estímulos vibratorios para informar el diseño de los sistemas de ASF para su uso con diferentes poblaciones con discapacidad sensorial.
Los métodos descritos aquí se basa en investigaciones antes de explorar la percepción humana de retroalimentación táctil y vibrotáctil 3,5,6, y fue desarrollado para uso en dos estudios previos 10,11. Los últimos dos estudios emplean este protocolo para examinar los efectos de la frecuencia de vibración y la ubicación en la precisión y puntualidad de las respuestas del usuario en amputados de miembros inferiores, lo que demuestra que ambos parámetros afectan de manera significativa las medidas de resultado, y que un alto grado de precisión de respuesta pueden ser alcanzado. Estos resultados se pueden utilizar para informar a la colocación ideal de contactores en futuros estudios clínicos y aplicaciones de los sistemas vibrotáctil ASF. Otros trabajos recientes deCrea et al. 12 examinó la sensibilidad del usuario a los cambios en los patrones de vibración aplicada en el muslo durante la marcha, usando respuestas verbales para indicar cambios percibidos a los patrones de vibración, en lugar de una respuesta motor. Aunque estas respuestas verbales pueden ser utilizados para medir la precisión de detección, que no tienen en cuenta errores y retrasos que pueden estar presentes en el proceso de control del motor.
La configuración primaria para los siguientes experimentos se compone de una serie de motores de vibración conectados a por ancho de pulso modulado pines de salida de una placa electronica. El tablero está, a su vez, controla a través de una conexión de bus serie universal (USB) a un equipo que ejecuta el software de diseño de sistemas disponibles en el mercado. Los motores requieren un circuito amplificador adicional para asegurar la suficiente tensión y la corriente se suministra a través de una amplia gama de frecuencias de vibración. Un circuito amplificador de ejemplo se muestra en la Figura 1. El transistor de unión bipolar (BJR) En la figura puede ser reemplazado con más pequeña de metal-óxido-semiconductor de efecto de campo transistor (MOSFET) para un funcionamiento más eficiente y el tamaño más pequeño. Del mismo modo, todo el circuito de amplificación puede ser sustituido por un controlador de motor háptica off-the-shelf para proporcionar un control adicional y la reducción de tamaño. Cada motor requiere su propio circuito, y el uso de los equipos mencionados en este documento, hasta diez motores puede ser controlado por una sola placa electronica.
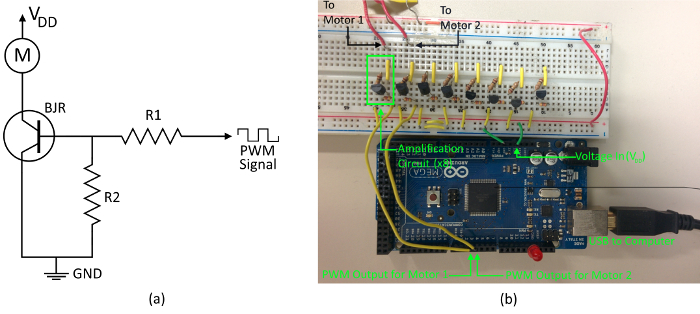
Figura 1. Motor de cableado. (A) El circuito de amplificación para un solo motor de vibración se muestra. Cada motor requiere un circuito separado y debe estar conectado a un puerto de salida PWM único en el microcontrolador. El V DD aquí representa la potencia de 3,3 V suministrada por la placa de desarrollo, y la resistencia R2 sirve como un resistente desplegable para garantizar el conmutador de transistor permanece abierto cuando el voltaje es cero aplicaciónmintió. (B) Un ejemplo del cableado físico de dos motores. Aunque se muestran ocho circuitos de amplificación individuales, sólo dos están conectados a motores de vibración. En este protocolo R1 = 4,7 kW y R2 = 100 kW. Haga clic aquí para ver una versión más grande de esta figura.
