Artificial sensorische Rückmeldung (ASF) kann als die Praxis der Bereitstellung von Echtzeit-biologische Information an Einzelpersonen definiert werden, die oft für kompromittiert Propriozeption oder andere sensorische Mechanismus kompensiert. 3, damit der Einzelne zur Beherrschung der physikalischen Prozesse , die einst eine unwillkürliche Reaktion des autonomen Nervensystems 4 – ASF wurde im Bereich der Rehabilitation von verletzten oder behinderten Menschen zu helfen bei der Wiederherstellung von Aspekten der körperlichen Funktion und Bewegung 1 lange verwendet. Eine Unterkategorie von ASF, biomechanische Biofeedback, verwendet externe Sensoren Parameter zur Messung bezüglich Kinematik zum Ausgleich oder Gang, und kommunizieren diese Informationen an die einzelnen durch eine Art angewandte Reiz. Eine zunehmend beliebte Ansatz zur biomechanischen Feedback beschäftigt kleinen Vibrationsmotoren oder Schütze, an verschiedenen Stellen des Körpers platziert räumliche sowie zeitliche Feedback zu geben. Zurück Literatur p zeigteromising Ergebnisse die Verwendung von vibrotaktilen Feedback in Anwendungen für Menschen mit unteren Extremitäten Amputationen, vestibulären Beeinträchtigungen und alterungsbedingte Verlust der Balance 5 Unterstützung – 9.
Ein gründliches Verständnis der Mechanismen, die individuelle Wahrnehmung und der Reaktion auf spezifische Reize Steuerung ist notwendig für die wirksame Umsetzung der ASF-Systeme für verschiedene Anwendungen zu informieren. Für vibrotaktilen Feedback, Leiter unter diesen Mechanismen sind Propriozeption und die sensomotorische Antwort, insbesondere die Benutzer Empfindlichkeit auf die angelegten Schwingungen und die Zeit, um die gewünschte Reaktion auszuführen erforderlich. Jede sensorische Informationen durch Schwingungsanregungen kommuniziert müssen spezifische Kombinationen von Schwingungsfrequenz, Amplitude, Position und Sequenz codiert werden. Daher Gestaltung von vibrotaktilen ASF-Systeme sollten Kombinationen von Parametern wählen Benutzer die Wahrnehmung und Interpretation der Reize zu maximieren, wieauch die Aktualität und Genauigkeit der resultierenden Reaktion des Motors. Das Ziel des Protokolls ist es, eine Plattform bereitzustellen, aus der Reaktionszeiten und Reaktionsgenauigkeit auf verschiedene Schwingungs Stimuli zu bewerten die Gestaltung von ASF-Systeme für die Verwendung mit verschiedenen Sinneshörigen Populationen zu informieren.
Die beschriebenen Verfahren baut hier auf dem Stand der Forschung die menschliche Wahrnehmung von taktilen und vibrotaktilen Feedback zu erkunden 3,5,6 und wurde 10,11 in zwei früheren Studien für den Einsatz entwickelt. Die letzteren beiden Studien, die dieses Protokoll verwendet, um die Auswirkungen der Schwingungsfrequenz und Lage auf die Richtigkeit und Aktualität der Benutzerantworten in der unteren Gliedmaßen Amputierte zu untersuchen, die zeigen, dass beide Parameter signifikant die Ergebnisse Maßnahmen beeinflussen, und dass ein hohes Maß an Reaktionsgenauigkeit kann sein erreicht. Diese Ergebnisse können verwendet werden, um die ideale Platzierung der Schütze in zukünftigen Studien und klinische Anwendungen von vibrotaktile ASF Systeme zu informieren. Andere neuere Arbeiten vonCrea et al. 12 user Empfindlichkeit gegenüber Änderungen in Vibrationsmuster untersucht beim Gehen auf den Oberschenkel angelegt, verbale Antworten unter Verwendung wahrgenommen Änderungen der Schwingungsmuster zu bezeichnen, eher als eine Motorreaktion. Während diese verbal Reaktionen verwendet werden können, die Erfassungsgenauigkeit zu messen, sie berücksichtigen nicht für Fehler und Verzögerungen, die in der Motorsteuerprozesses vorhanden sein können.
Der primäre Einrichtung für die folgenden Versuche besteht aus einer Reihe von Vibrationsmotoren mit pulsweitenmodulierten Ausgangsstifte eines Mikrocontrollers Platine. Die Platine ist, die wiederum über einen Universal Serial Bus (USB) Verbindung zu einem Computer gesteuert kommerziell erhältlichen System-Design-Software ausgeführt wird. Die Motoren benötigen eine zusätzliche Verstärkungsschaltung eine ausreichende Spannung, um sicherzustellen, und Strom wird über einen weiten Bereich von Schwingungsfrequenzen geliefert. Ein Beispiel Verstärkerschaltung ist in Figur 1 gezeigt. Der bipolare Flächentransistor (BJR) In der Figur können mit kleineren Metall-Oxid-Halbleiter-Feldeffekttransistor (MOSFET) zur effizienteren Betrieb und kleinere Größe ersetzt werden. In ähnlicher Weise kann die gesamte Verstärkungsschaltung durch eine off-the-shelf haptische Motortreiber ersetzt werden, um zusätzliche Steuerung bereitzustellen und reduzierter Größe. Jeder Motor benötigt eine eigene Schaltung und der Verwendung des Geräts in diesem Dokument enthalten sind, bis zu zehn Motoren können durch einen einzigen Mikrocontroller-Board gesteuert werden.
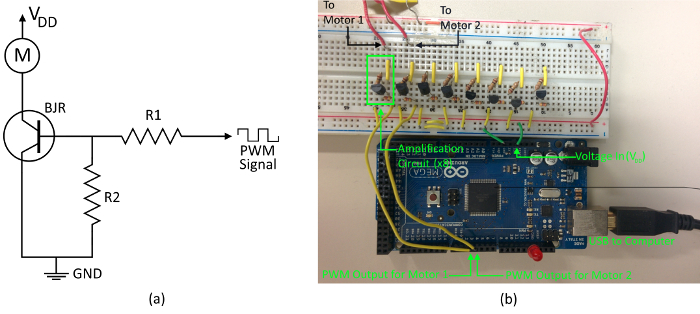
Abbildung 1. Motorkabel. (A) Die Verstärkerschaltung für einen einzigen Vibrationsmotor gezeigt. Jeder Motor erfordert eine separate Schaltung und muss auf dem Mikrocontroller zu einem einzigartigen PWM Ausgangsanschluss verbunden sein. Die V DD hier stellt die 3,3 – V – Strom durch den Mikrocontroller – Board geliefert wird , und der Widerstand R2 als Pull-Down – Widerstand dient der Transistor – Schalter , um sicherzustellen , bleibt offen , wenn Nullspannung Applog. (B) Ein Beispiel der physischen Verdrahtung von zwei Motoren. Obwohl acht einzelne Verstärkungsschaltungen dargestellt sind, sind nur zwei Vibrationsmotoren verbunden. In diesem Protokoll R1 = 4,7 kOhm und R2 = 100 kOhm. Bitte klicken Sie hier , um eine größere Version dieser Figur zu sehen.
