Искусственное сенсорная обратная связь (ASF) может быть определен как практика предоставления в режиме реального времени биологической информации для отдельных лиц, часто компенсируя скомпрометированы проприоцептивные или других сенсорных механизма. ASF уже давно используется в сфере реабилитации инвалидов или травмированных лиц для оказания помощи в восстановлении аспектов физической функции и движения 1 – 3, что позволяет людям контролировать физические процессы , которые были когда – то невольная реакция вегетативной нервной системы 4. Подкатегорию ASF, биомеханической БОС, использует внешние датчики для измерения параметров, связанных с баланса или походка кинематики, и передавать эту информацию индивидуума через какое-то прикладной стимул. Все более популярным подходом к биомеханической обратной связи использует небольшие вибрирующие моторы, или контакторов, расположенные в разных частях тела, чтобы обеспечить пространственное, а также временную обратную связь. Предыдущая литература показала рromising результаты , подтверждающие использование vibrotactile обратной связи в приложениях для людей с ампутации нижних конечностей, вестибулярных нарушений, а также связанные со старением потери равновесия 5 – 9.
Глубокое понимание механизмов, контролирующих восприятие индивидуума и ответ на специфические стимулы необходимы для информирования эффективной реализации ASF систем для различных областей применения. Для vibrotactile обратной связи, главным из этих механизмов являются проприоцепция и ответ сенсомоторной, в частности, чувствительность пользователя к прикладной вибрации и время, необходимое для выполнения желаемой реакции. Любая сенсорная информация передается через вибрации раздражители должны быть закодированы в виде специфических комбинаций частоты колебаний, амплитуды, местоположения и последовательности. Таким образом, проектирование систем ASF vibrotactile следует выбирать комбинации параметров для максимального восприятия пользователя и интерпретации стимулов, как иа также своевременность и точность полученного ответа двигателя. Целью данного протокола является предоставление платформы, из которой для оценки времени отклика и точность реагирования на различные колебательные раздражители информировать проектирование систем ASF для использования с различными сенсорными нарушениями населения.
Методы , описанные здесь , основывается на предыдущих исследованиях изучают человеческое восприятие тактильной и vibrotactile обратной связи 3,5,6, и был разработан для использования в двух предыдущих исследованиях 10,11. Последние два исследования использовали этот протокол для изучения влияния частоты вибрации и расположение на точность и своевременность ответов пользователя в ампутированы нижние конечности, показывая, что оба параметра существенно влияют на показатели исходов, а также о том, что высокая степень точности отклика может быть достигнуты. Эти результаты могут быть использованы для информирования идеального размещения контакторов в будущих исследованиях и клинических применений систем vibrotactile ASF. Другая недавняя работаCrea и др. 12 исследовали чувствительность пользователя к изменениям в структуре вибрации , приложенных к бедру при ходьбе, с использованием словесных ответов для обозначения воспринимаемые изменения в вибраций еще , а не двигательную реакцию. В то время как эти словесные ответы могут быть использованы для измерения точности обнаружения, они не учитывают наличие ошибок и задержек, которые могут присутствовать в процессе управления двигателем.
Первичная установка для следующих экспериментов состоит из ряда вибрационных двигателей, соединенных с широтно-импульсной модуляцией для выходных выводов микроконтроллера платы. Совет, в свою очередь, управляется через соединение универсальной последовательной шины (USB) на компьютере под управлением коммерчески доступного программного обеспечения для проектирования системы. Двигатели требуют дополнительной усилительной схемы, чтобы обеспечить достаточное напряжение и ток подается в широком диапазоне частот колебаний. Схема пример усилителя показана на рисунке 1. Биполярного плоскостного транзистора (BJR) На рисунке может быть заменен меньшим металл-оксид-полупроводник полевой транзистор (MOSFET) для более эффективной работы и меньшего размера. Аналогичным образом, вся усилительной схемы может быть заменен выпускаемый промышленностью тактильной привода двигателя, чтобы обеспечить дополнительный контроль и уменьшенный размер. Каждый двигатель требует свою собственную схему, и с использованием оборудования, перечисленных в этой статье, до десяти двигателей можно управлять с помощью одного микроконтроллера платы.
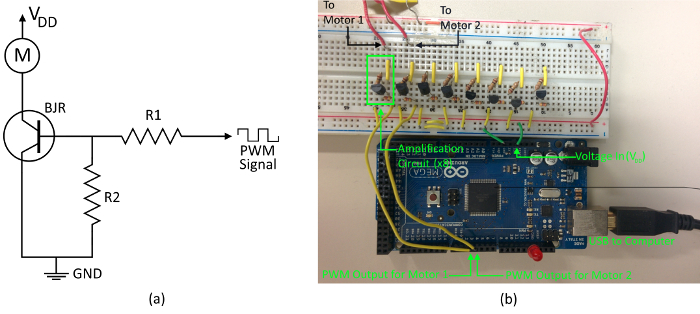
Рисунок 1. Схема подключения двигателя. (A) Схема усиления для одного вибрационного двигателя показан. Каждый двигатель требует отдельного контура и должен быть подключен к уникальным ШИМ-выходом порта на микроконтроллере. V DD здесь представляет мощность 3,3 В комплект поставки микроконтроллером платы, а резистор R2 служит понижающим резистор , чтобы обеспечить переключатель транзистор остается открытым , когда нулевое напряжение приложениелгал. (В) Пример физической разводки двух двигателей. Несмотря на то, восемь отдельных схем амплификации показаны только два подключены к вибрации двигателей. В этом протоколе R1 = 4,7 кОм и R2 = 100 кОм. Пожалуйста , нажмите здесь , чтобы посмотреть увеличенную версию этой фигуры.
