Le contrôleur naturel en boucle rapprochée
L’information sensoro-motrice circule continuellement entre le cerveau et le corps pour produire des comportements bien organisés et coordonnés. De tels comportements peuvent être étudiés tout en se concentrant uniquement sur les actions de la personne, comme dans un style monologue (Figure 1A), ou lors d’actions dynamiques complexes partagées entre deux agents dans une dyade, comme dans un style de dialogue (Figure 1B). Pourtant, une troisième option consiste à évaluer ces interactions complexes par l’intermédiaire d’un contrôleur proxy, dans le contexte d’une interface en boucle étroite homme-ordinateur (figure 1C). Une telle interface peut suivre les fluctuations des mouvements moment par moment apportées par chaque agent dans la dyade, et par le type de cohésion qui émerge de leurs interactions synchrones, aidant à orienter les rythmes de la dyade de manière souhaitable.
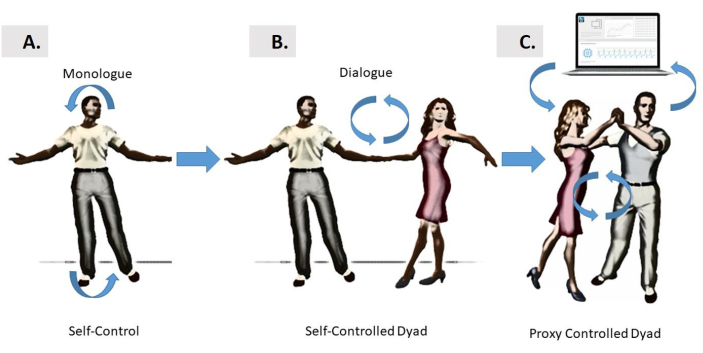
Figure 1: Différentes formes de contrôle. ( A )Lesinterfaces auto-contrôlées par le cerveau reposent sur les relations en boucle étroite entre le cerveau de la personne et son propre corps, qui peuvent s’autoréguler et s’auto-interagir dans le style « monologue ». Ce mode tente le contrôle des mouvements autogénérés, ou il peut également viser à contrôler les périphériques externes. (B) Le contrôle du style « Dialogue » est introduit pour deux danseurs qui interagissent les uns avec les autres et par l’entraînement physique et la prise de tour pour prendre le contrôle des mouvements de l’autre. (C) Le contrôle du dialogue « tiers » de la dyade est introduit sous la forme d’une interface informatique qui exploite en tandem les bio-signaux des deux danseurs, le paramétrise et le redyle aux danseurs sous forme remétr paramétrisée en utilisant l’audio et/ou la vision comme formes de guidage sensoriel. La re-paramétrisation dans les exemples présentés ici ont été atteints à l’aide de rétroaction audio ou visuelle, renforcée par la sortie motrice kinesthésique en temps réel de l’un des danseurs pour influencer l’autre; ou des deux danseurs, à tour de rôle dans un motif alternatif. S’il vous plaît cliquez ici pour voir une version plus grande de ce chiffre.
L’objectif global de cette méthode est de montrer qu’il est possible d’exploiter, de paramétriser et de re-paramétriser les fluctuations moment par moment dans les activités biorythmiques des corps en mouvement, car deux agents s’engagent dans un échange dynamique qui peut impliquer deux humains, ou un humain et son avatar auto-mobile.
Les investigations sur la façon dont le cerveau peut contrôler les actions et prédire leurs conséquences sensorielles ont généré de nombreuses lignes de demandes théoriques dans les1,2,3 et ont produit divers modèles de contrôle neuromoteur4,5,6,7,8. Une ligne de recherche dans ce domaine multidisciplinaire a impliqué le développement d’interfaces cerveau-machine ou cerveau-ordinateur en boucle rapprochée. Ces types de configurations offrent des moyens d’exploiter et d’adapter les signaux CNS pour contrôler un dispositif externe, comme un brasrobotique 9,10,11, un exosquelette12, un curseur sur un écran d’ordinateur13 (entre autres). Tous ces appareils externes partagent la propriété qu’ils n’ont pas de propre intelligence. Au lieu de cela, le cerveau qui essaie de les contrôler a, et une partie du problème auquel le cerveau est confronté est d’apprendre à prédire les conséquences des mouvements qu’il génère dans ces dispositifs (par exemple, les mouvements du curseur, les mouvements du bras robotique, etc) tout en générant d’autres mouvements de soutien qui contribuent à la rétroaction motrice sensorielle globale sous la forme de reafference kinesthésique. Souvent, le but primordial de ces interfaces a été d’aider la personne derrière ce cerveau à contourner une blessure ou un trouble, à retrouver la transformation de ses pensées intentionnelles en actes physiques volontairement contrôlés du dispositif externe. Moins fréquent cependant a été le développement d’interfaces qui tentent de diriger les mouvements des corps en mouvement.
Une grande partie de la recherche originale sur les interfaces cerveau-machine se concentrent sur le contrôle du système nerveux central (SNC) sur les parties du corps qui peuvent accomplir des actions dirigéespar des objectifs 9,14,15,16,17. Il existe toutefois d’autres situations où l’utilisation des signaux dérivés des activités du système nerveux périphérique (SPN), y compris celles du système nerveux autonome (ANS), est suffisamment instructive pour influencer et orienter les signaux des agents externes, y compris d’un autre humain ou avatar, ou même interagir avec les humains (comme dans la figure 1C). Contrairement à un bras robotique ou curseur, l’autre agent dans ce cas, a l’intelligence entraînée par un cerveau (dans le cas de l’avatar qui a été doté des mouvements de la personne, ou d’un autre agent, dans le cas d’une dyade humaine en interaction).
Une configuration qui crée un environnement d’interface co-adaptative en boucle rapprochée avec échange dyadique peut être d’usage pour intervenir dans les troubles du système nerveux par lequel le cerveau ne peut pas contrôler volitionally son propre corps en mouvement à volonté, bien qu’il n’ait pas physiquement coupé le pont entre le SNC et le PNS. Cela peut être le cas en raison de signaux périphériques bruyants par lesquels les boucles de rétroaction pour aider le cerveau à surveiller et ajuster en permanence ses propres biorythmes autogénérés peuvent avoir été perturbés. Ce scénario se produit chez les patients atteints de la maladie de Parkinson18,19, ou chez les participants atteints de troubles du spectre autistique avec un excès de bruit dans leur production motrice. En effet, dans les deux cas, nous avons quantifié des niveaux élevés de rapport bruit-signal dans les signaux kinesthésiques de retour dérivés de la vitessede leurs mouvements prévus 20,21,22 et du cœur23. Dans de tels cas, essayer de maîtriser le contrôle du cerveau des signaux externes, tout en essayant de contrôler le corps en mouvement, peut entraîner un signal auto-réactif du flux d’informations réintéser (re-afferent) que le cerveau reçoit du flux moteur continu (efferent) à la périphérie. En effet, les fluctuations moment par moment présentes dans un tel flux moteur efferent autogénéré contiennent des informations importantes utiles pour aider à la prédiction des conséquences sensorielles des actions délibérées24. Lorsque cette rétroaction est corrompue par le bruit, il devient difficile de mettre à jour de façon prévisible les signaux de commande et de ponter les plans intentionnels par des actes physiques.
Si nous étendions une telle boucle de rétroaction à un autre agent et contrôlions les interactions de la personne et de l’agent par l’intermédiaire d’un tiers(figure 1C),nous pourrions avoir la chance de diriger les performances de l’autre en temps quasi réel. Cela nous fournirait la preuve de concept que nous aurions besoin d’étendre la notion d’interfaces cerveau-corps-cerveau co-adaptatif ou cerveau-machine pour traiter les troubles du système nerveux qui entraînent une mauvaise réalisation de la volonté physique de l’intention mentale.
Les actions délibérées ont des conséquences, qui sont précisément caractérisées par des signatures stochastiques motrices qui dépendent du contexte et permettent l’inférence de niveaux d’intention mentale avec une grandecertitude 25,26. Ainsi, un avantage d’une nouvelle méthode qui tire parti de l’échange dydique sur les approches antérieures centrées sur la personne à la machine cérébrale ou interfaces informatiques du cerveau, est que nous pouvons augmenter les signaux de contrôle pour inclure les biorythmes corporels et cardiaques qui transpirent en grande partie sous la conscience de la personne, sous différents niveaux d’intention. De cette façon, nous amortissons les interférences réactives que le contrôle conscient tend à évoquer dans le processus d’adaptation du contrôle cerveau-curseur17. Nous pouvons ajouter plus de certitude au processus prédictif en paramétrisant les différents signaux que nous pouvons accéder. Dans ce sens, il existe des travaux antérieurs utilisant des signaux cérébraux et corporels en tandem27,28,29; mais les travaux impliquant des interactions dyades capturées par les signaux cérébraux restent rares. En outre, la littérature existante n’a pas encore délimité la distinction entre les segments délibérés de l’action exécutée sous pleine conscience et les motions transitoires qui se produisent spontanément à la suite des mouvementsdélibérés 30,31. Ici, nous faisons cette distinction dans le contexte de l’échange dyade, et offrons de nouvelles façons d’étudier cette dichotomie32, tout en fournissant des exemples de chorégraphiés (délibéré) vs improvisé (spontané) mouvements dans l’espace de danse.
En raison des retards de transduction et de transmission dans les processus d’intégration et de transformation sensorielle-motrice33,il est nécessaire d’avoir un tel code prédictif en place, d’apprendre à anticiper l’entrée sensorielle à venir avec une grande certitude. À cette fin, il est important de pouvoir caractériser l’évolution du rapport bruit-signal dérivé des signaux dans le flux kinesthésique de réafferent continuellement mis à jour. Nous avons ensuite besoin de protocoles en place pour mesurer systématiquement l’évolution de la variabilité motrice. La variabilité est intrinsèquement présente dans les fluctuations moment par moment du courant moteur sortant34. Étant donné que ces signaux ne sont pas stationnaires et sensibles aux variationscontextuelles 35,36, il est possible de paramétriser les changements qui se produisent avec des modifications du contexte des tâches. Afin de minimiser les interférences des signaux réactifs qui émergent du contrôle conscient du SNC, et d’évoquer des changements quantifiables dans le flux moteur Efferent PNS, nous introduisons ici une interface proxy en boucle étroite qui modifie indirectement la rétroaction sensorielle, en recrutant le signal périphérique qui change en grande partie sous la conscience de soi de la personne. Nous montrons ensuite des moyens de mesurer systématiquement le changement qui s’ensuit les manipulations sensorielles, en utilisant des analyses stochastiques permettant de visualiser le processus que l’interface proxy boucle rapprochée évoque indirectement chez les deux agents.
Présentation d’un contrôleur proxy en boucle rapprochée
La variabilité sensoro-motrice présente dans les signaux périphériques constitue une riche source d’information pour guider les performances du système nerveux tandis que l’apprentissage, l’adaptation et la généralisation ont lieu dans différents contextes37. Ces signaux apparaissent en partie comme un sous-produit de la SNC qui tente de contrôler les actions de façon volontaire, mais qui n’est pas l’objectif direct du contrôleur. Comme la personne interagit naturellement avec les autres, les signaux périphériques peuvent être exploités, normalisés et re-paramétrisés; ce qui signifie que leurs variations peuvent être paramétrisées et systématiquement décalées, car on modifie le flux moteur efferent qui revient continuellement dans le système comme une réafférence kinesthésique. Dans de tels contextes, nous pouvons visualiser les changements stochastiques, capturant avec une grande précision un signal riche qui est autrement perdu aux types de grande moyenne que les techniques plus traditionnelles effectuent.
Pour parvenir à la caractérisation du changement sous la nouvelle plate-forme statistique, nous introduisons ici des protocoles, des types de données normalisés et des analyses qui permettent l’intégration d’entrées sensorielles externes (auditives et visuelles) avec des signaux moteurs autogénérés en interne, tandis que la personne interagit naturellement avec une autre personne, ou avec une version avatar de la personne. En ce sens, parce que nous visons à contrôler les signaux périphériques (plutôt que de modifier les signaux CNS pour contrôler directement l’appareil ou le média externe), nous inventons ceci une interface proxy en boucle étroite (Figure 2). Nous visons à caractériser les changements dans les signaux stochastiques du SNR, car ils ont un impact sur ceux du SNC.
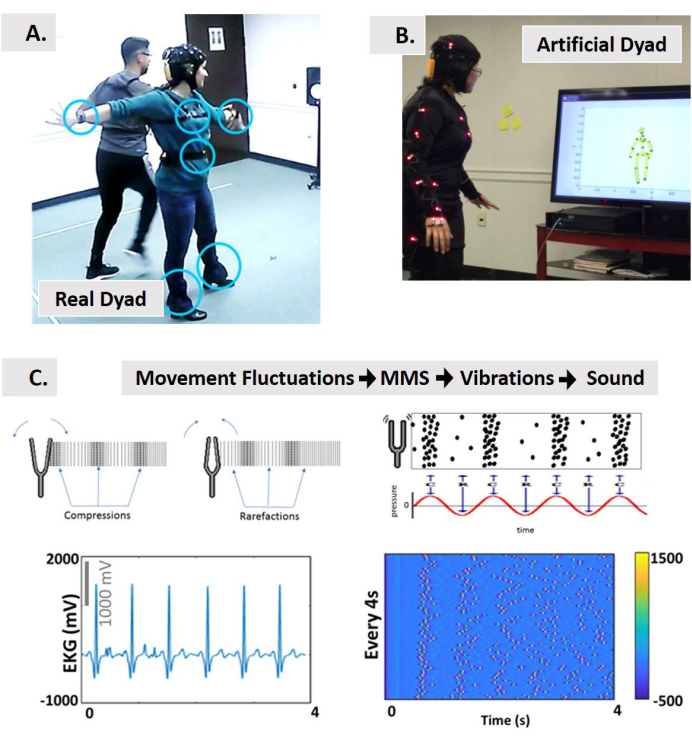
Figure 2: Contrôle indirect d’une interaction dyadique à l’aide d’une interface multimodale en boucle étroite. (A) Contrôle indirect de deux danseurs (salsa dansante) via une interface co-adaptative par ordinateur vs (B) une dyade interactive artificielle avatar-personne contrôlée en exploitant les signaux périphériques du système nerveux et en le remétrisant sous forme de sons et/ou d’entrée visuelle. (C) Le concept de sonification à l’aide d’un nouveau type de données normalisées (les pointes de micro-mouvement, MMS) dérivé des fluctuations moment par moment de l’amplitude/synchronisation des signaux biorythmiques convertis en vibrations, puis en son. De la physique, nous empruntons les notions de compressions et de rares faits produits par une fourchette de réglage qui produit l’onde sonore comme vibrations mesurables. Les schémas des ondes sonores représentés sous forme de pression modulée au fil du temps en parallèle aux concentrations de pointes pour la sonification. Exemple d’un signal physique pour subir le pipeline proposé de MMS à des vibrations et à la sonification. Nous utilisons le signal de fréquence cardiaque comme entrée à l’interface. Cela prend des fluctuations dans l’amplitude du signal alignées à l’apparition du mouvement toutes les 4 secondes de mouvement et construit des trains MMS représentant les vibrations. Les trains à pointes du MMS sont normalisés à partir de [0,1]. La couleur des pointes selon la barre de couleur, représente l’intensité du signal. Nous sonifions ensuite ces vibrations à l’aide de Max. Ce signal sonifié peut être utilisé pour lire en A, ou pour modifier en B les interactions avec l’avatar. En outre, en B, il est possible d’intégrer le son dans l’environnement et d’utiliser la position du corps pour jouer le son en arrière à une région d’intérêt (RoI), ou de moduler les caractéristiques audio en fonction de la distance à la RoI, la vitesse ou l’accélération d’une partie du corps ancrée à une autre partie du corps, lors du passage par le RoI. S’il vous plaît cliquez ici pour voir une version plus grande de ce chiffre.
Les signaux PNS peuvent être exploités de manière non invasive avec des technologies de détection portable qui co-enregistrent des flux efferents multimodaux de différentes couches fonctionnelles du système nerveux, allant de l’autonome auvolontaire 32. Nous pouvons ensuite mesurer en temps quasi réel les changements dans ces flux et sélectionner ceux dont les modifications améliorent le rapport signal-bruit. Ce signal moteur éfferent peut alors être augmenté avec d’autres formes de guidage sensoriel (p. ex., auditive, visuelle, etc.) Parce que le PNS signale une conscience totale du paysage, ils sont plus faciles à manipuler sans beaucoup de résistance 38. En tant que tel, nous les utilisons pour aider à orienter la performance de la personne d’une manière qui peut être moins stressante pour le système humain.
Construction de l’interface
Nous présentons la conception du contrôle proxy médié par une interface multimodale co-adaptative en boucle étroite. Cette interface oriente la rétroaction multisensorielle en temps réel. La figure 3 affiche la conception générale.
L’interface boucle rapprochée se caractérise par 5 étapes principales. La première étape est la collecte de données multimodales à partir de multiples instruments portable. La 2ème étape est la synchronisation des flux multimodaux à travers la plate-forme de LabStreamingLayer (LSL, https://github.com/sccn/labstreaminglayer) développée par le groupe MoBI 39. La 3ème étape est la diffusion de la structure de données LSL vers une interface python, MATLAB ou autre langage de programmation pour intégrer les signaux et paramétiser empiriquement les fonctionnalités physiologiques (pertinentes à notre configuration expérimentale) en temps réel. La 4ème étape consiste à re-paramétriser les caractéristiques sélectionnées extraites du flux continu du signal corporel étudié et à l’augmenter à l’aide d’une modalité sensorielle de choix (par exemple, visuelle, auditive, kinesthésique, etc.) pour le rejouer sous forme de sons ou de visuels, pour augmenter, remplacer ou améliorer la modalité sensorielle qui est problématique dans le système nerveux de la personne. Enfin, la 5ème étape consiste à réévaluer les signatures stochastiques des signaux générés par le système en temps réel, à sélectionner quelles modalités sensorielles apportent les changements stochastiques des fluctuations corporelles à un régime de haute certitude (minimisation du bruit) dans la prédiction des conséquences sensorielles de l’action imminente. Cette boucle est jouée en continu tout au long de l’expérience en se concentrer sur le signal sélectionné, tout en stockant la performance complète pour les analyses ultérieures (comme indiqué dans les schémas de la figure 3 etvoir 40,41,42,43,44,45,46,47 pourun exemple d’analyses posteriori).
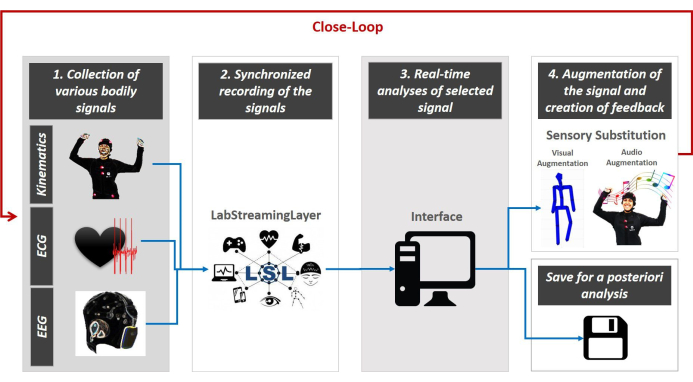
Figure 3: L’architecture du concept d’interface en boucle étroite multimodale à boucle périphérique. Divers signaux corporels sont recueillis – données cinétiques, activité cardiaque et cérébrale (étape 1). LSL est utilisé pour co-enregistrer et diffuser de façon synchrone les données provenant de divers équipements vers l’interface (étape 2). Python/MATLAB/C# code est utilisé pour paramétriser en permanence les fluctuations des signaux à l’aide d’un type de données normalisé et d’une échelle commune qui permet de sélectionner la source de guidage sensoriel la plus adéquate pour atténuer l’incertitude du système (étape 3). Cette amélioration en temps réel de la transmission du signal par le biais de certains canaux permet ensuite de re-paramétriser le signal sensoriel de réintégration pour s’intégrer dans le flux moteur continu et améliorer le flux d’entrée perdu ou corrompu (étape de substitution sensorielle 4). Une nouvelle évaluation continue ferme la boucle (étape 5) et nous en sauvons toutes les données pour d’autres analyses futures. S’il vous plaît cliquez ici pour voir une version plus grande de ce chiffre.
Les sections suivantes présentent le protocole générique de la façon de construire une interface en boucle étroite (telle que décrite dans la figure 3)et décrivent les résultats représentatifs de deux interfaces expérimentales (minutieusement présentées dans Le matériel supplémentaire) impliquant l’interaction dyade physique entre deux danseurs (véritable système en boucle étroite) et l’interaction dyade virtuelle entre une personne et un avatar (système artificiel en boucle rapprochée).
