Der natürliche Close-Loop-Controller
Sensorisch-motorische Informationen fließen kontinuierlich zwischen Gehirn und Körper, um gut organisierte, koordinierte Verhaltensweisen zu erzeugen. Solche Verhaltensweisen können untersucht werden, während man sich auf die Handlungen der Person allein konzentriert, wie in einem Monologstil (Abbildung 1A), oder bei komplexen dynamischen Aktionen, die von zwei Agenten in einer Dydegeteilten geteilt werden, wie in einem Dialogstil (Abbildung 1B). Eine dritte Möglichkeit besteht jedoch darin, solche komplexen Interaktionen über einen Proxy-Controller im Kontext einer Nahschleifenschnittstelle zwischen Mensch und Computer zu bewerten (Abbildung 1C). Eine solche Schnittstelle kann die Moment-für-Moment-Bewegungen Schwankungen verfolgen, die von jedem Agenten in der Dyade beigesteuert werden, und durch die Art von Kohäsivität, die sich aus ihren synchronen Interaktionen ergibt, und dabei helfen, die Rhythmen der Dyade auf wünschenswerte Weise zu steuern.
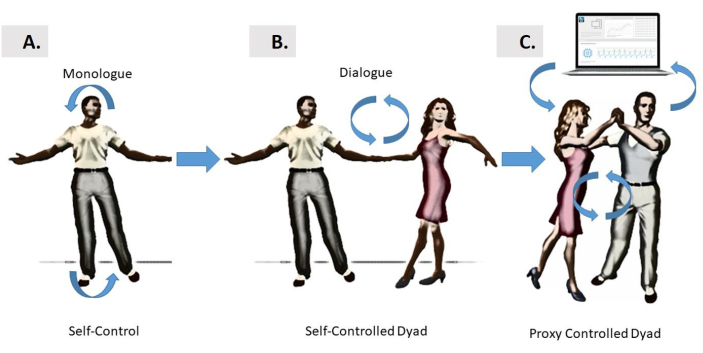
Abbildung 1: Verschiedene Formen der Kontrolle. (A) Selbst hirngesteuerte Schnittstellen basieren auf den engen Beziehungen zwischen dem Gehirn der Person und dem eigenen Körper, die sich selbst regulieren und selbst interagieren können im “Monolog”-Stil. Dieser Modus versucht die Steuerung von selbst generierten Bewegungen, oder es kann auch darauf abzielen, externe Geräte zu steuern. (B) Die Stilsteuerung “Dialog” wird für zwei Tänzer eingeführt, die miteinander interagieren, und durch physische einzuschlagende und umgedrehte Bewegungen, um die Kontrolle über die Bewegungen des jeweils anderen zu erlangen. (C) Die Dialogsteuerung der Dyade wird durch eine Computerschnittstelle vermittelt, die die Biosignale beider Tänzer zusammen nutzt, parametriert und den Tänzern in reparaparatorisierter Form mit Audio und/oder Vision als Formen sensorischer Führung zuführt. Die Reparametrierung in den hier vorgestellten Beispielen wurde durch Audio- oder visuelles Feedback erreicht, verstärkt durch die echtzeit-kinesthetische Motorleistung eines der Tänzer, um den anderen zu beeinflussen; oder von beiden Tänzern, abwechselnd in wechselnden Mustern. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
Das übergeordnete Ziel dieser Methode ist es, zu zeigen, dass es möglich ist, die Moment-für-Moment-Schwankungen in den biorhythmischen Aktivitäten von Körpern in Bewegung zu nutzen, zu parametrierisieren und neu zu parametrisieren, da zwei Agenten einen dyadischen Austausch betreiben, an dem zwei Menschen oder ein Mensch und sein/ihr sich selbst bewegender Avatar beteiligt sein können.
Untersuchungen darüber, wie das Gehirn Aktionen steuern und ihre sensorischen Folgen vorhersagen kann, haben in der Vergangenheit viele Zeilen theoretischer Untersuchungen in der Vergangenheit1,2,3 und produziert verschiedene Modelle der neuromotorischen Steuerung4,5,6,7,8. Eine Forschungslinie in diesem multidisziplinären Bereich umfasste die Entwicklung von Nahschleifen-Gehirn-Maschine- oder Gehirn-Computer-Schnittstellen. Diese Arten von Setups bieten Möglichkeiten, die CNS-Signale zu nutzen und anzupassen, um ein externes Gerät zu steuern, wie z. B. einen Roboterarm9,10,11, ein Exoskelett12, einen Cursor auf einem Computerbildschirm13 (unter anderem). Alle diese externen Geräte teilen die Eigenschaft, dass sie keine eigene Intelligenz haben. Stattdessen hat das Gehirn, das versucht, sie zu kontrollieren, und ein Teil des Problems, mit dem das Gehirn konfrontiert ist, zu lernen, wie man die Folgen der Bewegungen vorhersagt, die es in diesen Geräten erzeugt (z. B. die Bewegungen des Cursors, die Bewegungen des Roboterarms usw.), während andere unterstützende Bewegungen erzeugt werden, die zur allgemeinen sensorischen motorischen Rückkopplung in Form von kinesthetischem Rückfall beitragen. Oft war das übergeordnete Ziel dieser Schnittstellen, der Person hinter diesem Gehirn zu helfen, eine Verletzung oder Störung zu umgehen, die Transformation ihrer absichtlichen Gedanken in volitional kontrollierte körperliche Handlungen des externen Geräts wiederzuerlangen. Weniger verbreitet ist jedoch die Entwicklung von Schnittstellen, die versuchen, die Bewegungen von Körpern in Bewegung zu lenken.
Ein Großteil der ursprünglichen Forschung auf Gehirn-Maschine-Schnittstellen konzentrieren sich auf die Kontrolle des zentralen Nervensystems (ZNS) über Körperteile, die zielgerichteteAktionen9,14,15,16,17erreichen können. Es gibt jedoch andere Situationen, in denen die Verwendung der Signale, die von Aktivitäten des peripheren Nervensystems (PNS) abgeleitet werden, einschließlich der Signale des autonomen Nervensystems (ANS), informativ genug ist, um die Signale externer Wirkstoffe zu beeinflussen und zu steuern, einschließlich eines anderen Menschen oder Avatars oder sogar interagierender Menschen (wie in Abbildung 1C). Anders als bei einem Roboterarm oder -cursor verfügt der andere Agent in diesem Fall über Intelligenz, die von einem Gehirn angetrieben wird (im Fall des Avatars, der mit den Bewegungen der Person oder eines anderen Agenten ausgestattet ist, im Falle einer interagierenden menschlichen Dyade).
Ein Setup, das eine Umgebung einer koadaptiven Nahschleifenschnittstelle mit dyadischem Austausch schafft, kann von Nutzen sein, um bei Störungen des Nervensystems einzugreifen, wobei das Gehirn den eigenen Körper nicht freiwillig nach Belieben steuern kann, obwohl es die Brücke zwischen ZNS und PNS nicht physisch durchtrennt hat. Dies kann aufgrund lauter peripherer Signale der Fall sein, bei denen die Rückkopplungsschleifen, um das Gehirn kontinuierlich zu überwachen und seine eigenen selbst erzeugten Biorhythmen anzupassen, gestört worden sein könnten. Dieses Szenario tritt bei Patienten mit Parkinson-Krankheit18,19, oder bei Teilnehmern mit Autismus-Spektrum-Störungen mit übermäßigem Rauschen in ihrer motorischen Leistung. In beiden Fällen haben wir in den zurückkehrenden kinesthetischen Signalen, die aus der Geschwindigkeit ihrer beabsichtigten Bewegungen20,21,22 und aus dem Herzenabgeleitetwerden, ein hohes Geräusch-Signal-Verhältnis quantifiziert. In solchen Fällen kann der Versuch, die Gehirnsteuerung externer Signale zu beherrschen, während gleichzeitig versucht wird, den Körper in Bewegung zu steuern, zu einem selbstreaktiven Signal des wiedereintretenden (wiedereintretenden) Informationsstroms führen, den das Gehirn vom kontinuierlichen (effedünnen) Motorstrom an der Peripherie erhält. Tatsächlich enthalten die Moment-für-Moment-Schwankungen in einem solchen selbsterzeugten effetierischen Motorstrom wichtige Informationen, die nützlich sind, um die Vorhersage der sensorischen Folgen zielgerichteter Handlungen zu unterstützen24. Wenn dieses Feedback durch Rauschen beschädigt wird, wird es schwierig, die Steuersignale vorhersagbar zu aktualisieren und absichtliche Pläne mit physischen Handlungen zu überbrücken.
Wenn wir eine solche Feedback-Schleife auf einen anderen Agenten ausdehnen und die Interaktionen der Person und des Agenten über einen Dritten steuern würden(Abbildung 1C), hätten wir möglicherweise die Möglichkeit, die Leistungen des anderen in nahezu Echtzeit zu steuern. Dies würde uns den Beweis des Konzepts liefern, dass wir den Begriff der ko-adaptiven Gehirn-Körper- oder Gehirn-Maschine-Schnittstellen erweitern müssten, um Störungen des Nervensystems zu behandeln, die zu einer schlechten Realisierung körperlicher Willensfähigkeit aus geistiger Absicht führen.
Gezielte Handlungen haben Folgen, die gerade durch motorisch-stochastische Signaturen gekennzeichnet sind, die kontextabhängig sind und mit hoher Sicherheit Rückschlüsse auf mentale Absichtsniveaus ermöglichen25,26. Ein Vorteil einer neuen Methode, die den dyadischen Austausch gegenüber früheren personenzentrierten Ansätzen an die Gehirnmaschine oder die Computerschnittstellen des Gehirns nutzt, besteht darin, dass wir die Kontrollsignale erweitern können, um den Körper- und Herzbiorhythmus einzubeziehen, der sich weitgehend unter dem Bewusstsein der Person unter verschiedenen Ebenen der Absicht abspielt. Auf diese Weise dämpfen wir reaktive Interferenzen, die bewusste Kontrolle bei der Anpassung der Hirncursorsteuerung tendenziell hervorruft17. Wir können dem Vorhersageprozess mehr Sicherheit verleihen, indem wir die verschiedenen Signale parametrieren, auf die wir zugreifen können. In diesem Sinne gibt es vorarbeiten mit Gehirn- und Körpersignalen im Tandem27,28,29; aber Arbeit mit dyadischen Interaktionen, die von Gehirn-Körper-Signalen erfasst werden, bleibt rar. Darüber hinaus hat die bestehende Literatur noch nicht die Unterscheidung zwischen absichtlichen Abschnitten der Handlung unter vollem Bewusstsein und Übergangsbewegungen, die spontan als Folge der absichtlichen30,31auftreten. Hier machen wir diese Unterscheidung im Kontext des dyadischen Austauschs und bieten neue Möglichkeiten, diese Dichotomie zu studieren32, während wir Beispiele für choreographierte (absichtliche) vs. improvisierte (spontane) Bewegungen im Tanzraum anbieten.
Aufgrund der Transduktions- und Übertragungsverzögerungen in den sensorisch-motorischen Integrations- und Transformationsprozessen33ist es notwendig, einen solchen Vorhersagecode an Ort und Stelle zu haben, um zu lernen, bevorstehende sensorische Eingaben mit hoher Sicherheit zu antizipieren. Zu diesem Zweck ist es wichtig, die Entwicklung des Geräusch-Signal-Verhältnisses zu charakterisieren, das von Signalen im sich ständig aktualisierenden kinesthetischen reafferenten Strom abgeleitet wird. Wir brauchen dann Protokolle, um die Veränderung der Motorvariabilität systematisch zu messen. Die Variabilität ist inhärent in den Moment-für-Moment-Schwankungen des ausgehenden effedünnen Motorstroms34vorhanden. Da diese Signale nicht stationär und empfindlich auf kontextuelle Variationen35,36sind, ist es möglich, Änderungen zu parametrierieren, die mit Änderungen des Aufgabenkontexts auftreten. Um Interferenzen durch reaktive Signale, die aus der bewussten ZNS-Steuerung entstehen, zu minimieren und quantifizierbare Veränderungen im effedünnen PNS-Motorstrom hervorzurufen, führen wir hier eine Proxy-Close-Loop-Schnittstelle ein, die indirekt das sensorische Feedback verändert, indem wir das periphere Signal rekrutieren, das sich weitgehend unter dem Selbstbewusstsein der Person ändert. Wir zeigen dann Möglichkeiten auf, die Veränderung, die die sensorischen Manipulationen durchführt, systematisch zu messen, indem wir stochastische Analysen verwenden, die geeignet sind, den Prozess zu visualisieren, den die Proxy-Close-Loop-Schnittstelle indirekt in beiden Agenten hervorruft.
Einführung eines Proxy Close-Loop Controllers
Die sensorisch-motorische Variabilität in den peripheren Signalen stellt eine reiche Informationsquelle dar, die die Leistung des Nervensystems leiten kann, während Lernen, Anpassung und Verallgemeinerung in verschiedenen Kontexten stattfinden37. Diese Signale treten teilweise als Nebenprodukt des ZNS hervor, das versucht, Aktionen volitativ zu steuern, sind aber nicht das direkte Ziel des Controllers. Da die Person natürlich mit anderen interagiert, können die peripheren Signale genutzt, standardisiert und neu parametrisiert werden; d.h. ihre Variationen können parametriert und systematisch verschoben werden, da man den effedünnen Motorstrom, der kontinuierlich als kinesthetische Referenz in das System eindringt, ändert. In solchen Einstellungen können wir die stochastischen Verschiebungen visualisieren und mit hoher Präzision ein reichhaltiges Signal erfassen, das ansonsten an die Arten von grand averaging verloren geht, die traditionellere Techniken ausführen.
Um die Charakterisierung des Wandels unter der neuen statistischen Plattform zu erreichen, führen wir hier Protokolle, standardisierte Datentypen und Analysen ein, die die Integration externer sensorischer Eingaben (auditorisch und visuell) mit intern selbst generierten motorischen Signalen ermöglichen, während die Person natürlich mit einer anderen Person oder mit einer Avatarversion der Person interagiert. In diesem Sinne, weil wir darauf abzielen, die peripheren Signale zu steuern (anstatt die CNS-Signale zu ändern, um das externe Gerät oder Medien direkt zu steuern), koinieren wir dies eine Proxy-Close-Loop-Schnittstelle (Abbildung 2). Unser Ziel ist es, die Veränderungen in den stochastischen Signalen des PNS zu charakterisieren, da sie sich auf die im ZNS auswirken.
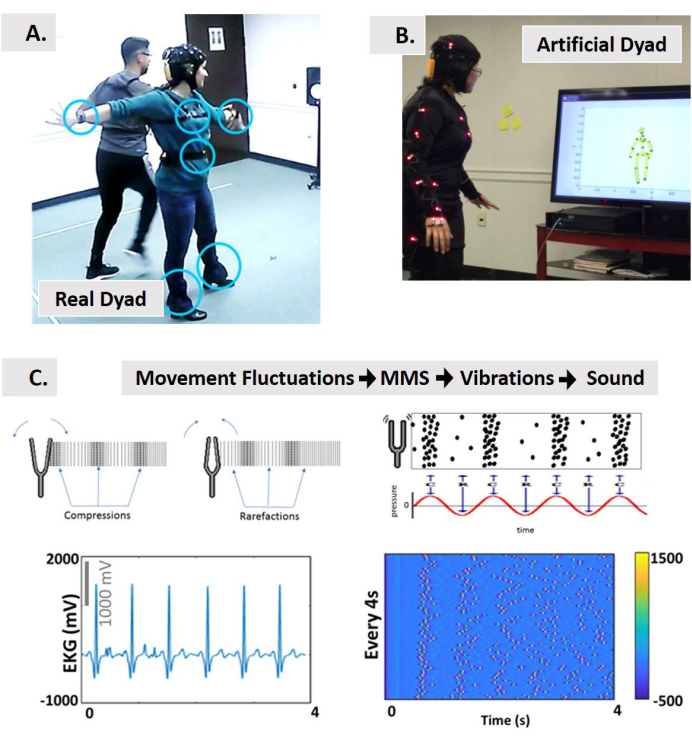
Abbildung 2: Proxy-Steuerung einer dyadischen Interaktion mit nahschleifenübergreifender multimodaler Schnittstelle. (A) Indirekte Steuerung von zwei Tänzern (tanzende Salsa) über eine Computer-Ko-adaptive Schnittstelle vs. (B) eine interaktive künstliche Personen-Avatar-Dya, die durch die Nutzung der Signale des peripheren Nervensystems gesteuert wird und sie als Sounds und/oder als visuelle Eingabe neu parametrisiert. (C) Das Konzept der Sonifikation mit einem neuen standardisierten Datentyp (die Mikrobewegungsspitzen, MMS) abgeleitet von den Moment-für-Moment-Schwankungen der biorhythmischen Signale Amplitude/Timing in Vibrationen und dann in Ton umgewandelt. Aus der Physik entlehnt man uns die Begriffe Kompressionen und Seltenheiten, die von einer Stimmgabel erzeugt werden, die Schallwelle als messbare Schwingungen ausgibt. Schemata von Schallwellen, die im Laufe der Zeit parallel zu Spitzenkonzentrationen zur Sonifikation als Druck moduliert dargestellt werden. Beispiel für ein physikalisches Signal, das die vorgeschlagene Pipeline von MMS zu Vibrationen und Sonifikation enthoniert werden soll. Wir verwenden das Herzfrequenzsignal als Eingang zur Schnittstelle. Dies nimmt Schwankungen in der Amplitude des Signals, die alle 4 Sekunden der Bewegung ausgerichtet sind, und baut MMS-Züge, die die Vibrationen darstellen. Die Spike-Züge des MMS sind ab [0,1] standardisiert. Die Farbe der Spitzen gemäß der Farbleiste stellt die Intensität des Signals dar. Wir sonifizieren diese Schwingungen dann mit Max. Dieses sonifizierte Signal kann verwendet werden, um in A wiederzugeben oder in B die Interaktionen mit dem Avatar zu ändern. Darüber hinaus ist es in B möglich, den Klang in die Umgebung einzubetten und die Körperposition zu verwenden, um den Klang in einem Bereich von Interesse (RoI) wieder abzuspielen, oder die Audio-Features als Funktion der Entfernung zum RoI, der Geschwindigkeit oder Beschleunigung eines Anliegerteils zu modulieren, wenn es am RoI vorbeigeht. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
Die PNS-Signale können nicht-invasiv mit tragbaren Sensortechnologien genutzt werden, die multimodale effetierische Ströme aus verschiedenen funktionellen Schichten des Nervensystems, von autonombis zu freiwilligen32, ko-registrieren. Wir können dann in nahezu Echtzeit die Änderungen in solchen Streams messen und diejenigen auswählen, deren Änderungen das Signal-Rausch-Verhältnis verbessern. Dieses effevermotorische Signal kann dann durch andere Formen der sensorischen Führung (z.B. auditiv, visuell usw.) ergänzt werden. Da das PNS Landschaftsbewusstsein signalisiert, sind sie ohne großen Widerstand leichter zu manipulieren 38. Als solche verwenden wir sie, um die Leistung der Person auf eine Weise zu steuern, die für das menschliche System weniger belastend sein kann.
Erstellen der Schnittstelle
Wir präsentieren das Design der Proxy-Steuerung, die durch eine close-loop co-adaptive multimodale Schnittstelle vermittelt wird. Diese Schnittstelle steuert das multisensorische Feedback in Echtzeit. Abbildung 3 zeigt den allgemeinen Entwurf.
Die Close-Loop-Schnittstelle zeichnet sich durch 5 Hauptschritte aus. Der erste Schritt ist die multimodale Datenerfassung von mehreren tragbaren Instrumenten. Der zweite Schritt ist die Synchronisation der multimodalen Streams über die Plattform von LabStreamingLayer (LSL, https://github.com/sccn/labstreaminglayer) entwickelt von der MoBI-Gruppe 39. Der dritte Schritt ist das Streaming der LSL-Datenstrukturan eine Python-, MATLAB- oder andere Programmiersprachenschnittstelle, um die Signale zu integrieren und die physiologischen Merkmale (relevant für unseren experimentellen Aufbau) in Echtzeit empirisch zu parametrisieren. Der vierte Schritt besteht darin, die ausgewählten Features, die aus dem kontinuierlichen Strom des untersuchten Körpersignals extrahiert werden, neu zu parametrisieren und es mit einer sensorischen Modalität der Wahl (z. B. visuell, auditiv, kinesthetisch usw.) zu erweitern, um es in Form von Klängen oder Visuals wiederzugeben, um die sensorische Modalität, die im Nervensystem der Person problematisch ist, zu erweitern, zu ersetzen oder zu verbessern. Schließlich besteht der 5. Schritt darin, die stochastischen Signaturen der vom System erzeugten Signale in Echtzeit neu zu bewerten, um auszuwählen, welche sensorische Modalität die stochastischen Verschiebungen der körperlichen Schwankungen zu einem Regime hoher Sicherheit (Lärmminimierung) bei der Vorhersage der sensorischen Folgen der bevorstehenden Aktion bringt. Diese Schleife wird während der gesamten Dauer des Experiments kontinuierlich mit dem Fokus auf das ausgewählte Signal gespielt, während die volle Leistung für nachfolgende Analysen gespeichert wird (wie in den Schaltplänen von Abbildung 3 dargestellt und siehe40,41,42,43,44,45,46,47 für ein Beispiel für eine posteriori Analysen).
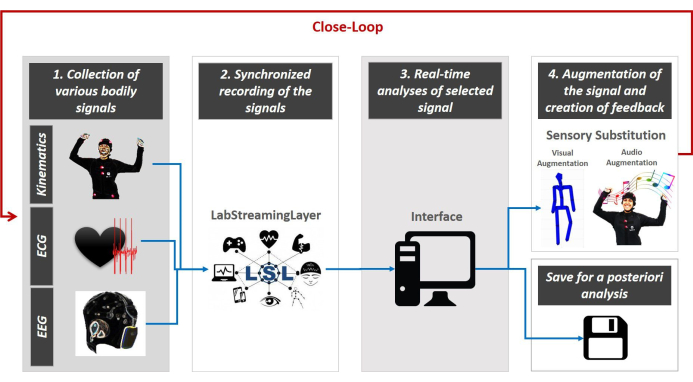
Abbildung 3:Die Architektur des multimodalen, peripheriegesteuerten Nahschleifen-Schnittstellenkonzepts. Verschiedene Körpersignale werden gesammelt -kinematische Daten, Herz- und Gehirnaktivität (Schritt 1). LSL wird verwendet, um die Daten, die von verschiedenen Geräten kommen, synchron mit zu registrieren und zu streamen, an die Schnittstelle (Schritt 2). Python/MATLAB/C-Code wird verwendet, um die Schwankungen in den Signalen kontinuierlich zu parametrieren, indem ein standardisierter Datentyp und eine gemeinsame Skala verwendet werden, die die Auswahl der Quelle der sensorischen Führung ermöglicht, die am besten geeignet ist, die Unsicherheit des Systems zu dämpfen (Schritt 3). Diese Echtzeit-Verbesserung der Signalübertragung durch ausgewählte Kanäle ermöglicht dann eine erneute Parametrierung des wieder eintretenden Sensorsignals, um sich in den kontinuierlichen Motorstrom zu integrieren und den verlorenen oder beschädigten Eingangsstrom zu verbessern (sensorischer Ersetzungsschritt 4). Kontinuierliche Neubewertung schließt die Schleife (Schritt 5) und wir speichern alle Daten für weitere zukünftige Analysen. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
Die folgenden Abschnitte stellen das allgemeine Protokoll zum Erstellen einer Close-Loop-Schnittstelle (wie in Abbildung 3beschrieben) dar und beschreiben repräsentative Ergebnisse zweier experimenteller Schnittstellen (aufwendig dargestellt in Supplementary Material), die eine physikalische dyadische Interaktion zwischen zwei Tänzern (reales Close-Loop-System) und eine virtuelle dyadische Interaktion zwischen einer Person und einem Avatar (künstliches Nahschleifensystem) beinhalten.
