מיקרוסקופ המנהור כוח אטומי בטמפרטורה הנמוכה ללא מגע / סריקה (LT NC-AFM / STM, ב SPM פשוט כינה הבא) הוא הכלי מועדף על מניפולציה מדויקת אטומי של אטומים בודדים או מולקולות 1 – 3. מניפולציה מבוססת SPM מוגבלת בדרך כלל לשני ממדים מורכבים מסדרה של אירועי מניפולציה פתאומיים ולעתים קרובות סטוכסטיים (קופץ). זה בעצם מגביל את השליטה על התהליך. פנייה אל מולקולת נדון על ידי קשר כימי יחיד בעמדה אטומית מוגדרת היטב מובילה גישה שיכולה להתגבר על מגבלות אלה כוללים 4 – 9. במהלך המניפולציה שלה מולקולת הקשר מחוברת קצה SPM כך נע המולקולה בכל שלושת הממדים ידי התקות מתאימות של הקצה הופך אפשרי. זה יוצר אפשרות נהלי מניפולציה שונות ומורכבים מבוצעים בחלל 3D. עם זאת מניפולצית הפנייה עשויה להיות הייndered ידי אינטראקציות של מולקולת מניפולציות עם המשטח או / ומולקולות אחרות בסביבתה, אשר עשוי ליצור כוחות כי הם גדולים מספיק כדי לקרוע את קשר מולקולת קצה. לכן מסלול 3D מסוים של קצה SPM יכול או לא יכול לגרום לאירוע מניפולציה מוצלח. שאלה ולכן נשאלת איך להגדיר פרוטוקולים שמובילים סיומו המוצלח של מניפולציה בנסיבות כאשר האג"ח טיפ-המולקולה יש כוח מוגבל, ואילו האינטראקציות של מולקולת מניפולציות עם סביבתו אינן א-פריורי היטב מאופיינות.
הנה שאלה זו הוא התקרב ב שאפשר להעלות על הדעת באופן אינטואיטיבי ביותר. הנסיין רשאי להחזיק התקות של קצה SPM פשוט על ידי הזזת היד שלהם 7. זו מושגת על ידי צימוד SPM למערכת לכידה תנועה מסחרית, חלק המפרטים מהם מובא בהמשך. היתרון של "מניפולציה נשלט ביד" (HCM) נמצא tהוא היכולת של הנסיין לנסות מסלולי מניפולציה שונים במהירות וללמוד מהכישלון או הצליח.
ההתקנה HCM נעשה שימוש כדי לערוך ניסוי הוכחה של עיקרון שבו מילה ( "Julich") היה כתוב בשכבה סגורה של perylene-3,4,9,10-tetracarboxylic dianhydride (PTCDA) מולקולות על Ag ( 111), הסרת 48 מולקולות, אחד אחרי השני, עם HCM 7. הרמת מולקולה מן מסלקת משטח קשרי מימן מולקולאריים שלה המחייבים את המולקולות בשכבה 10. בדרך כלל בעצמה הכוללת של אגרות החוב הנוכחיים מולקולאריים עולה כוחו של הקשר הכימי יחיד בין האטום החיצוני של הקצה ו אטום חמצן קרבוקסיליות של PTCDA שבאמצעותו מולקולת קשר (ראה איור 1). זה עלול להוביל לקרע של איש קשר טיפ המולקולה והכישלון הבא של ניסיון המניפולציה. המשימה של הנסיין ובכך determine מסלול קצה, אשר שובר את אג"ח מולקולאריים ההתנגדות ברצף, ולא בצורה סימולטנית, כך שהכח הכולל מוחל על קשר מולקולת טיפ מעולם עולה כוחה.
למרות המסלול הרצוי יכול עקרונית להיות מדומה, בשל גודלו ומורכבותו של המערכת מעורבת סימולציות הצורך תיקחנה כמות גדולה להחריד של זמן. בניגוד לזה, באמצעות HCM ניתן היה להסיר את המולקולה הראשונה לאחר 40 דקות. לקראת סוף ניסוי החילוץ לקח כבר הרבה פחות זמן אשר מאשר את האפקטיביות של הליך הלמידה. בנוסף, את הדיוק ואת צדדיות של שיטת HCM העידו במעשה המניפולציה הפוכה כאשר מולקולת חילוץ ממיקום השכנה שמשה כדי לסגור את החלל שהותיר לאחר ההסרה השגויה של מולקולה אחרת מן בשכבה.
גישה לכידת תנועה, בעת היותו מהיר ואינטואיטיבי, הואמוגבל ההדור של נתונים טיפ-מסלול. לפיתוח שיטתי נוסף של פרוטוקולי מניפולציה מולקולרית חדשים זה חשוב לא פחות כדי להיות מסוגל להציג את נתוני מסלול טיפ בזמן אמת כמו גם לנתח נתונים שנוצרו בעבר. לכן הפונקציונליות של התקנת HCM היא משופר באופן משמעותי על ידי הוספת משקפי מציאות מדומה המאפשרים בניסויים כדי לראות את הנתונים זממו בסצנה הווירטואלית 3D שבו מסלול טיפ מועצם על ידי הזרם (I) ו שינוי תדר (Δf) ערכים הנמדדים על ידי SPM בזמן אמת 8 (ראה להלן). בנוסף לכך, את סצנת המציאות מדומה מציגה מודל של מולקולת המניפולציות כי המשמשת כנקודת התייחסות חזותית בסולם. לכן הגדרת HCM החמיאה על ידי ממשק המציאות המדומה מתאימה מיפוי שיטתי של שטח מסלול מניפולציה ועידון רצוף של פרוטוקולי מניפולציה המבטיחים. חוץ מזה המערכת גם מקלה על העברת ידע בין דניסויי ifferent. הפסקאות הבאות לתת תיאור של ההתקנה וחלק המפרט שלו שרלוונטיים עבור ניסויי מניפולציה.
הניסויים מתבצעים ואקום אולטרה גבוה (UHV) בלחץ בסיס של 1 x 10 -10 mbar עם SPM מסחרי בהיקף של תא הכנה תא ניתוח. תא ההכנה מצויד: Ar + מקור המשמש מקרטעת מדגם, העברת מדגם באמצעות מניפולטור (מאפשרת חימום וקירור של מדגם), התאבכות אלקטרונים באנרגיה נמוכה (LEED), תא קנודסן אישית (K-cell) המכיל אבקת PTCDA מטוהר על ידי סובלימציה. תא ניתוח מצויד: LN 2 cryostat אמבטיה עם נפח של 12 ליטר ו זמן מחזיק 46 שעות, cryostat אמבטיה LHE (5 L, 72 שעות), Besocke 11 SPM חיפושית מסוג מצויד חיישן קולן 12 ( TFS) המורכב מזלג קוורץ כוונון עם טיפ PtIr מחובר חשמלית (לתפעול STM), אשר נחתך וחידד על ידי אלומת יונים ממוקדת (FIB) (איור 2).
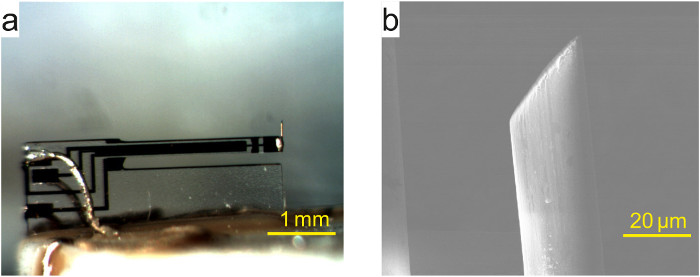
כוונון איור 2. חיישן מזלג. (א) תמונה של חיישן קולן מסחרי עם קצה PtIr מצורף. (ב) תמונה SEM של קצה הקודקוד PtIr לחתוך עם FIB. אנא לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו.
ה- AFM מופעל במצב מווסתת בתדר (FM) 13 שבו TFS הוא מתרגש התהודה (f 0 ≈ 31,080 הרץ) עם אלמנט פייזו להסס. האות פיזואלקטריים של קולן נדנוד מוגבר בשימוש על ידי לולאה נעול מופע (PLL), אשר שומר את המשרעת של הקבוע תנודה של TFS ועוקבת שינויים של iתדר התהודה ts, Δf = f – f 0, כי מקורו שיפוע של הכוח הפועל על קצה. כפי שניתן לראות בתרשים 3 עמדת קצה SPM נשלטת על ידי מתח (u x, u y, u z) שחל על קבוצה של X, y-, Z- Piezos (קבועי פייזו ב -5 K: x = 15, y = 16, z = 6 A / V). ה- x u, u y, u -voltages z (± 10 V ב 20 רזולוצית bit) נוצר תפוקות אלקטרוניקת SPM. הם מוגברים יותר על ידי מתח גבוה (HV) מגבר בעל מתח תפוקה מקסימלית של ± 200 V.
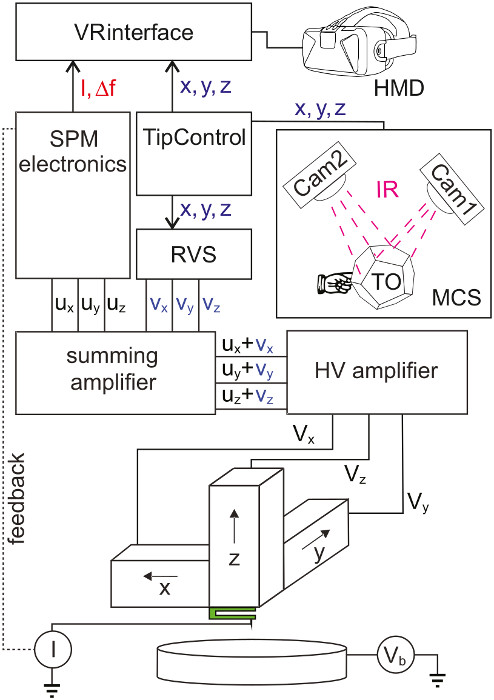
איור 3. שרטוטים של התקנת HCM. העמדה (אובייקט במעקב) לזה יש מרובים (אינפרא אדום) מקורות IR מותקנים על פני השטח שלו הוא מועבר על ידי שתי מצלמות אינפרא אדומות של מערכת לכידת תנועה (MCS). TipControl כךftware משיג את לקואורדינטות (x, y, z) מ MCS ומעביר אותו למקור מתח מרחוק (נירוסטה) אשר מייצר מערכת של מתחים (x v, v y, v z) כי מסוכמים עם מתחים (u x , u y, u z) המיוצר על ידי אלקטרוניקת SPM על שליטת עמדת קצה SPM. המתח הוסיף עובר דרך מתח גבוה (HV) מגבר והוא מוחל נוסף למערכת פייזו-המיצוב של קצה SPM. ההתקנה מאפשרת שליטה ידנית של מיקום הקצה כאשר משוב SPM (FB) הלולאה פתוחה. ה (x, y, z) עמדת הקצה, כמו גם אני (x, y, z) Δf (x, y, z) מועברים תוכנת VRinterface כי מגרשת אותו בסצנה הווירטואלית 3D לראות על ידי המפעיל לובש את התצוגה רכובה-הראש (HMD). נא ללחוץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו.
הזרם מנהור שזורם בין קצה SPM והשטח נמדד על ידי מגבר transimpedance עם רווח משתנה הנע בין 1 x 10 3 כדי 1 x 10 9 V / A (רוחב פס בשבח 1 x 10 9 V / A הוא 1 kHz). תפוקת המגבר מוזנת לתוך משוב STM הלולאה (FB) להסדיר את גובה הטיפ מעל פני השטח במצב סריקת זרם קבוע. היציבות של הצומת (עם תנודת TFS כבויה) היא 1-3 בערב. אות תנודת פיזואלקטריים של TFS מוגברת בשני שלבים: (1) מגבר מקובע מגן 2 LN (לזכות 1 x 10 8 V / A, רוחב פס 20 kHz), ו- (2) מגבר מתח חיצוני עם רווח משתנה מ 1 x 10 1 5 x 10 4 ורוחב פס של 1 מגה-הרץ.
בניסויי HCM, התקנת SPM מתארכת עם: מערכת לכידת תנועה (MCS), מקור מתח רב לשליטה מרחוק (נירוסטה), מגבר מסכם וראש מציאות מדומה רכובה תצוגה (HMD). כל המכשירים הרשומים פרט summing המגבר נרכש מסחרי.
MSC היא מערכת אינפרא אדום (IR) סמן מעקב המאפשר ברזולוציה מילימטר של התקות מרחבית בשיעור של 100 הרץ. המערכת כוללת שני IR מצלמות, אובייקט שניתן למעקב (TO) ואת תוכנת השליטה. התוכנה MCS משיג את X, y-, Z- הקואורדינטות של TO בחלל 3D באמצעות ניתוח תמונות שלה מתקבל על ידי שתי מצלמות. MCS מספק ספריית תכנות המאפשרת שימוש של הקואורדינטות של TO מתוך תוכנה נפרדת.
הקואורדינטות של TO (X כדי, Y כדי, ת) מועברות תוכנה מפיתוח אישית "TipControl". איור 4 מראה מסך של ממשק המשתמש הגרפי. התוכנה מופעלת על ידי כפתור "התחל" בחלון. לאחר ההפעלה (τ = 0) התוכנה קובעת כל x v -, y v – נ z -voltages על נירוסטה (טווח מתח ± 10 V 16קצת רזולוציה, 50 חביון msec לכל צעד מתח) על פי הביטוי הבא  וכו ', כאשר x ג, ג y, c z הם הגורמים להמיר 5 ס"מ של עקירה של TO לתוך 1 עקירה Å של קצה SPM. הגורמים p x (t), עמ 'y (t), p z (t) יש ערכים שהוגדרו על ידי מצב של ה- X, y-, Z- תיבות הסימון בחלון התוכנה. אם התיבה מסומנת אז p (t) המתאים מוגדר 1. כל p (t) מוגדרים 0 כרגע בעת לחיצה על לחצן "הפסקה" נלחץ בחלון התוכנה. זה מאפשר למפעיל זמני "להקפיא" את עמדת הקצה. לחיצה על כפתור "איפוס כל" בחלון התוכנה קובעת x v – נ y – נ z -voltages לאפס שמחזירה את קצה למיקומו ההתחלתי שהוגדרו על ידי תוכנת SPM. שדה הטקסט "פקודה ידנית כדי נירוסטה" ב ca חלון התוכנה n לשמש כדי להגדיר את x v -, y v – נ z -voltages לכל ערך בטווח המותר של ± 10 V. ה- x v -, y v – נ z -voltages שנוצר על ידי נירוסטה מתווספים אל u x -, u y -, u אותות מתח -output z האלקטרוניקה SPM באמצעות מגבר סיכום (לזכות 1, רוחב הפס 50 kHz, פלט טווח ± 10 V).
וכו ', כאשר x ג, ג y, c z הם הגורמים להמיר 5 ס"מ של עקירה של TO לתוך 1 עקירה Å של קצה SPM. הגורמים p x (t), עמ 'y (t), p z (t) יש ערכים שהוגדרו על ידי מצב של ה- X, y-, Z- תיבות הסימון בחלון התוכנה. אם התיבה מסומנת אז p (t) המתאים מוגדר 1. כל p (t) מוגדרים 0 כרגע בעת לחיצה על לחצן "הפסקה" נלחץ בחלון התוכנה. זה מאפשר למפעיל זמני "להקפיא" את עמדת הקצה. לחיצה על כפתור "איפוס כל" בחלון התוכנה קובעת x v – נ y – נ z -voltages לאפס שמחזירה את קצה למיקומו ההתחלתי שהוגדרו על ידי תוכנת SPM. שדה הטקסט "פקודה ידנית כדי נירוסטה" ב ca חלון התוכנה n לשמש כדי להגדיר את x v -, y v – נ z -voltages לכל ערך בטווח המותר של ± 10 V. ה- x v -, y v – נ z -voltages שנוצר על ידי נירוסטה מתווספים אל u x -, u y -, u אותות מתח -output z האלקטרוניקה SPM באמצעות מגבר סיכום (לזכות 1, רוחב הפס 50 kHz, פלט טווח ± 10 V).
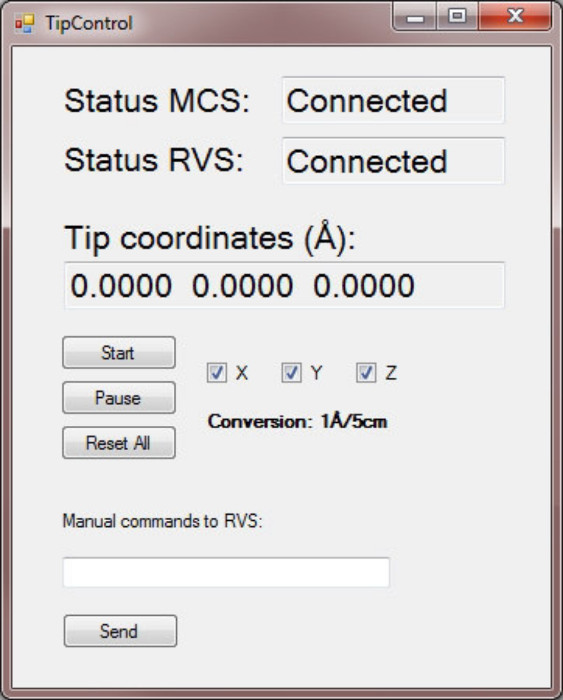
איור 4. צילום מסך של חלון הממשק. שני מדדים מציגים את מצב חיבור עם מערכות MCS ו נירוסטה. תיבות סימון משמשות כדי להפעיל שליטה ביד לאורך צירי המרחב שנבחר. לחצן "התחל" יוזם זרימת נתונים בין MCS, TipControl ו נירוסטה על פי התכנית שמוצגת באיור 3. לחצן "הפסקה" מפסיקה את זרימת הנתונים. לחצן "Reset All" מעמיד את כל הנירוסטה מתחי לאפס.= "Https://www.jove.com/files/ftp_upload/54506/54506fig4large.jpg" target = "_ blank"> לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו.
להדמיה של הנתונים הניסיוניים (מסלול טיפ, אני, Δf) תצוגה רכובה ראש (HMD) משמשת. HMD מספק תצוגה סטריאוסקופית (תצוגת HD מפוצלת – חצי אחד לכל עין, 1,920 x 1,080 פיקסלים בקצב של 75 הרץ). מצלמת IR ייעודי עוקב אחר המיקום והכיוון של HMD בחלל 3D באמצעות IR-LEDs קבוע על פני השטח של HMD. מערכת המעקב HMD מאפשרת למפעיל כדי לשנות את התצוגה בתוך הסצנה מציאות מדומה 3D על ידי הפניית הראש שלהם או פשוט הזזת הגוף שלהם.
התוכנה המותאמת אישית בכתב "VRinterface" אוספת את הנתונים הוא SPM ו MCS, הופכת את זה בסצנת 3D באמצעות OpenGL ומציגה אותו HMD בעזרת ערכת פיתוח תוכנת HMDS (SDK). VRinterface מאחזר ה- X בפועל, y-, Z- הקואורדינטות של קצה ישירותתוכנת קצה (כמה חביון אלפית השנייה) בעוד אותות I ו- Δf נקראים ישירות מן התפוקות של אלקטרוניקה SPM (חביון ≈ 250 msec). איור 5 מראה מסך של הסצינה 3D הווירטואלי כפי שהוא נראה על ידי המפעיל לובש HMD במהלך HCM. בתוך זירת 3D הווירטואלית איפקס הקצה מוצג כתחום לבן. הצביעה של מסלולי טיפ רשמו משקפת ערכית או log (I (x, y, z)) או Δf (x, y, z). מעבר בין log (I (x, y, z)) או Δf (x, y, z) מצבי צבע נעשה על ידי כפתור. כפתור אחר יוזם את ההקלטה (והצגה) של נתונים מסלולים קצה הניסיונות. כאשר נלחץ שוב על הכפתור עוצר את ההקלטה. הסצינה וירטואלי גם מראה מולקולה PTCDA סטטי אשר משמש ככלי עזר ויזואלי במהלך מניפולציה. מפעיל מיישרת האורינטציה שלו באופן ידני כדי להתאים את הכיוון של המולקולה האמיתית על פני השטח באמצעות כפתורים במקלדת.
זהירות: מכיוון הראש tעצבים של HMD מסתמכים על-נוריות IR, הוא עלול להפריע עם MCS משום שהוא גם משתמש באור אינפרא אדום כדי לעקוב אחר המיקום של TO. לכן צריך להיות צורה ייחודית מוכרת על ידי MCS. זה עוזר MCS להפלות בין האותות שמגיעים אל לבאים מכיוון IR-LEDs של HMD.
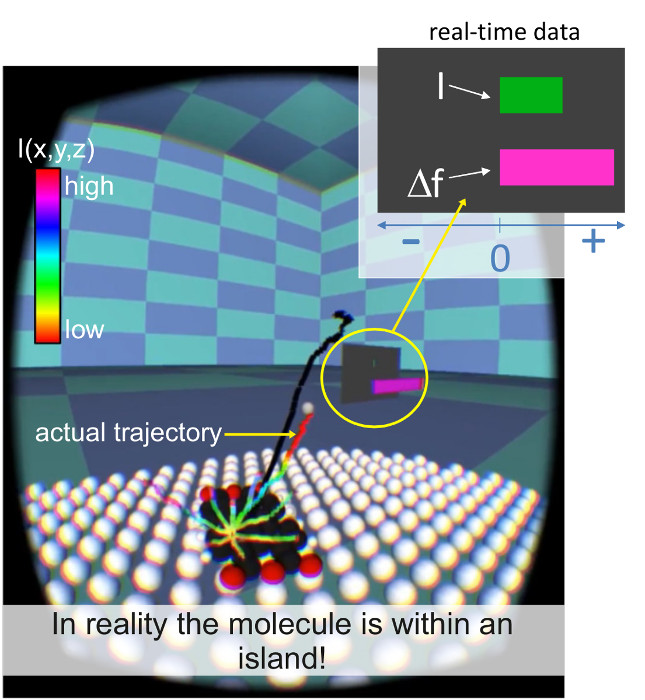
איור 5. S creenshot של הסצינה 3D הווירטואלי מוצג למפעיל HMD במהלך HCM. קבוצה של לבנים וכדורים מהווה מודל Ag (111) לפני השטח. אוריינטציה של משטח הדגם לא בהכרח בקנה אחד עם הכיוון של המדגם. מודל של מולקולת PTCDA ממוקם מעל פני שטח המודל. C, O, אטומי H של PTCDA מוצגים שחור, אדום ולבן בהתאמה. לצורך התמצאות azimuthal הנוחות של מולקולת המודל יכול להיות מותאם כדי להתאים את הכיוון של המולקולה האמיתית נבחרהעבור מניפולציה. עמדת הקצה מסומנת על ידי כדור לבן אחד מייצג האטום איפקס טיפ החיצוני. הריאל-פעם שאני (x, y, z) Δf (x, y, z) הנתונים מוצגים כאינדיקטורים בר להציב ליד קצה. בעבר רשמה וכן המניפולציות המתבצעות כיום מוצגים מסלולי 3D שצבעה מייצג גם log (I (x, y, z)) או Δf (x, y, z) ערכים הנמדדים המתאים עמדות של המסלול. האיור מציג מסלולים כי נצבעים log (I (x, y, z)) אות. ניגוד הצבע ניתן להעביר בין log (I (x, y, z)) ו Δf (x, y, z) מצבים ידי בלחיצת כפתור. אנא לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו.
