3 – (다음 단순히이라고 SPM에 LT NC-AFM / STM) 저온 비접촉 원자 힘 / 주사 터널링 현미경은 개별 원자 또는 분자 하나의 원자 정확한 조작을위한 선택의 도구입니다. SPM 기반의 조작은 일반적으로 두 치수에 한정 급격한 종종 확률 조작 이벤트 (점프)의 연속으로 구성된다. 이것은 본질적으로 프로세스에 대한 제어를 제한합니다. 9 – 잘 정의 된 원자 위치에 하나의 화학 결합에 의해 문제의 분자를 접촉시켜 이러한 한계 (4)를 극복 할 수있는 방법에 연결됩니다. 그 조작을 통하여 접촉 된 분자는 팁의 적절한 변위에 의해 모든 입체적 분자를 이동시키는 것이 가능해진다되도록 SPM 팁에 연결된다. 이 3D 공간에서 수행되는 여러 가지 복잡한 조작 절차에 대한 가능성을 작성합니다. 그러나 접촉 조작 안녕 수있다팁 분자 접촉을 파열 할 정도로 큰 힘을 만들 수 있습니다 주변에서 표면 및 / 또는 다른 분자와 조작 된 분자의 상호 작용에 의해 ndered. 따라서 SPM 팁의 특정 3D 궤도 또는 성공적인 조작 이벤트가 발생하지 않을 수있다. 질문은 이렇게 환경과 조작 분자의 상호 작용이 연역적 잘 특징없는 동안, 팁 분자 결합이 제한된 강도를 가지고있는 상황에서 조작의 성공적인 완료로 이어질 프로토콜을 정의하는 방법을 발생한다.
다음은이 질문은 가장 직관적 인 방식으로 상상할에 접근합니다. 실험자들은 단순히 손으로 칠 이동하여 SPM 팁의 변위를 제어 할 수있다. 이것은 상업적인 모션 캡쳐 시스템에 SPM의 결합에 의해 달성되며, 일부 사양은 아래로 제공된다. "손으로 제어 조작"(HCM)의 장점은 t에그는 신속하게 다른 조작 궤적을 시도하고 자신의 실패 또는 성공에서 배울 수있는 실험의 능력.
HCM의 설정은 단어 ( "Jülich의")는 AG에 대한 페 릴렌 – 3,4,9,10- 테트라 카르 복실 산 이무수 물 (PTCDA) 분자의 폐쇄 층에 스텐실하고있는 원리 증명 실험 (수행하는 데 사용되었습니다 111) HCM 7 48 분자 하나씩 제거. 표면 절단 단층 (10) 내의 분자 결합의 분자간 수소 결합 분자의 리프팅. 일반적으로, 본 분자간 결합의 전체 강도는 팁의 최 원자 및 분자 (도 1 참조)를 접촉하는 PTCDA의 카르 복실 산소 원자 사이에 단일의 화학적 결합의 강도를 초과한다. 즉, 팁 분자 접촉의 파열 및 조작 시도의 다음과 같은 오류가 발생할 수 있습니다. 실험자의 작업은 determi하는 것이있다네브라스카 총 힘이 팁 분자 접촉에 적용되도록 순차적이 아니라 동시에보다 저항 분자 결합을 파괴 팁 궤적은 결코 강도를 초과하지 않습니다.
원하는 궤적 원리 시뮬레이션 할 수 있으나, 시스템의 크기 및 복잡성으로 인해 필요한 시뮬레이션 시간이 엄청나게 많은 양을 포함 할. 그와 대조적으로, HCM을 사용하여 40 분 후의 제 분자를 제거 할 수 있었다. 실험의 끝 무렵 추출 이미 학습 과정의 유효성을 확인하는 것이 시간이 덜했다. 인접 위치에서 추출 된 분자 단일 층에서 다른 분자의 오류를 제거한 후 남은 빈 공간을 닫 사용한 경우 또한, HCM 방법의 정확도 및 범용성 역방향 조작 행위에 입증 하였다.
모션 캡쳐 방법은 빠르고 직관적이면서이며팁 궤적 데이터의 생성에 한정. 새로운 분자 조작 프로토콜 더욱 체계적인 개발 실시간 팁 궤도 데이터를 볼뿐만 아니라, 이전에 생성 된 데이터를 분석 할 수있는 것도 중요하다. 따라서, HCM 설정의 기능은 실험자의 선단 궤도가 전류 (I)에 의해 보강되는 3D 가상 장면 플롯 데이터 및 주파수 변화를 볼 수 있도록 가상 현실 고글 첨가함으로써 실질적으로 개선된다 (Δf에) 값을 측정하여 실시간 8의 SPM에 의해 (아래 참조). 이 외에, 가상 현실 장면 시각적 스케일 기준으로서 기능하는 조작 된 분자의 모델을 도시한다. 따라서 가상 현실 인터페이스에 의해 칭찬 HCM의 설정은 조작 궤도 공간의 체계적인지도 및 유망 조작 프로토콜의 연속적인 정제에 적합하다. 시스템은 또한 D 사이의 지식 전달을 용이하게 게다가ifferent 실험. 다음 단락은 설치의 설명과 조작 실험에 관련된 사양의 일부를 제공합니다.
실험은 제조 챔버로 구성된 상업용 및 SPM 분석 챔버와 1 × 10-10 mbar에서의베이스 압력에서 초고 진공 (UHV)에서 수행된다. 제조 챔버가 구비되어 샘플 스퍼터링에 사용되는 아르곤 + 소스 매니퓰레이터 통한 샘플 전송은, 저에너지 전자 회절 (LEED), PTCDA 분말을 함유 맞춤 크 누센 셀 (K 셀) (가열 및 시료의 냉각을 허용) 승화 정제. 음차 센서 (12) (장착 12 L의 부피 및 46 시간의 유지 시간, LHE 목욕 저온 유지 장치 (5 L, 72 시간) Besocke 11 딱정벌레 형 SPM과 LN이 목욕 저온 유지 장치를 다음 분석 챔버가 구비되고 STM 조작에 (전기적으로 접속 PTIR 팁과 석영 음차 이루어진 TFS))잘라내어 집속 이온빔 (FIB) (도 2)에 의해 선명 화된다.
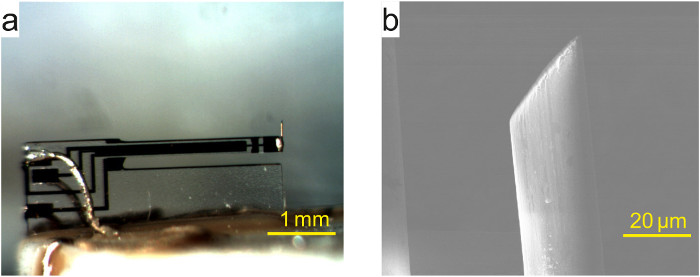
도 2 음차 센서. PTIR 장착 팁과 상용 음차 센서의 (a) 이미지. (b)는 FIB로 절단 PTIR 팁 정점의 SEM 이미지. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
원자 현미경은 TFS는 디더 압전와 공진 (0 ≈ 31,080 Hz의 F)에서 흥분 주파수 변조 (FM) 모드 (13)에 운영하고 있습니다. 진동 음차 압전 신호는 TFS의 일정한 진동의 진폭을 유지하고 I의 변화를 추적하는 위상 동기 루프 (PLL)에 의해 증폭 사용선단에 작용하는 힘의 기울기에 기인 0 F – TS 공진 주파수, Δf에 F =. 도 3에 나타낸 바와 같이, SPM 팁 위치는 5 K에서 (유, U, Y가 X U z) X- 세트에인가되는 전압에 의해, Y 축, Z-피에조 (압전 상수를 제어한다 : X = 15, Y = 16, Z = 6 / V). 를 U X는 유 Y, U, Z -voltages (20 비트 해상도에서 ± 10 V)는 SPM 전자 출력에서 생성됩니다. 이들은 상기 ± 200 V.의 최대 출력 전압을 가진 고전압 (HV) 증폭기에 의해 증폭된다
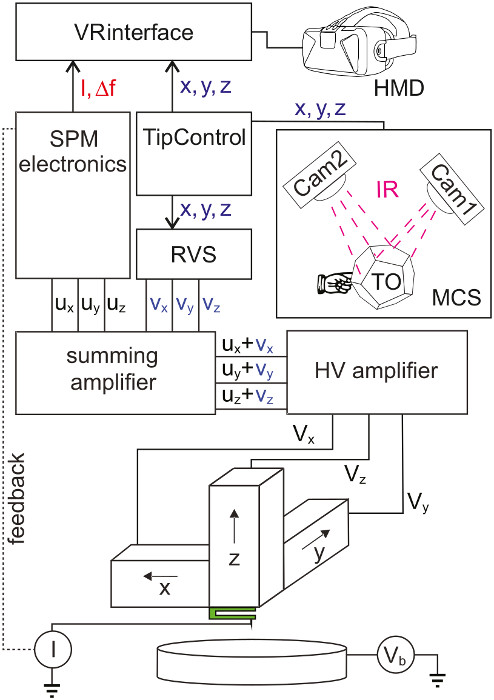
그림 HCM 설정 3. 회로도. (추적 개체)의 위치가 TO는 모션 캡쳐 시스템 (MCS)의 두 개의 적외선 카메라로 추적 표면에 설치된 다수의 (적외선) IR 소스가 있습니다. TipControl 그래서ftware 한 세트의 전압 (V의 X, V의 Y를 V z) 전압에 가산되는 (U, X 생성 (RVS)를 MCS에서 좌표 (x, y, z)을 위해 획득하고 원격 전압원에 전달 , U Y, U는 Z)를 SPM 팁 위치 제어를위한 SPM 전자에 의해 생성. 추가 된 전압은 고전압 (HV) 증폭기를 통과하여 상기 SPM 팁 피에조 포지셔닝 시스템에 적용된다. 스핀들 모터 피드백 (FB) 루프가 열려있을 때 설치가 끝 위치를 수동으로 제어 할 수 있습니다. 제 (X, Y, Z) 선단의 위치뿐만 아니라, I (x, y, z) 및 Δf에 (X, Y, Z)는 오퍼레이터에 의해 보여지는 3D 가상 장면을 플롯 VRinterface 소프트웨어로 전달되는 것과 헤드 마운트 디스플레이 (HMD)를 입고. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
스핀들 모터 팁 사이에 흐르는 터널링 전류표면이 1 × 109 V / A 1 × 103의 범위 가변 게인 트랜스 임피던스 증폭기에 의해 측정된다 (이득 1 대역폭 × 109 V / A는 1 kHz에서)입니다. 증폭기의 출력은 정전류 주사 모드의 표면 위의 선단 높이를 조절하는 STM 피드백 (FB) 루프에 공급된다. 합니다 (TFS 진동이 꺼져과) 접합부의 안정성은 1 ~ 3시입니다. 하여 TFS의 압전 발진 신호는 두 단계 증폭 다음 LN이 실드에 고정 (1) 프리 앰프 (게인 1 × 108 V / A, 대역폭 20 kHz로), 및 1 가변 이득 (2) 외부 전압 증폭기 10 X 10 X 4 1 5 1 MHz의 대역폭.
디스플레이 (HMD)를 장착 모션 캡쳐 시스템 (MCS), 원격 제어 채널의 전압 소스 (RVS), 합산 증폭기 및 가상 현실 헤드 : HCM 실험의 경우, SPM 설정이 확장됩니다. summi 제외하고 나열된 모든 장치NG 앰프는 상업적으로 획득 하였다.
MSC는 100 Hz의 레이트로 공간적 변위 mm 해상도를 허용하는 적외선 (IR) 마커 추적 시스템이다. 시스템은 두 개의 IR 카메라로 구성 추적 가능한 객체 (TO) 및 제어 소프트웨어. MCS의 소프트웨어는 두 대의 카메라에 의해 얻어진 그 화상을 분석하여 3 차원 공간에서의 TO의 X, Y, Z 좌표를 취득한다. MCS는 별도의 소프트웨어 프로그램 TO의 좌표를 사용할 수 있도록하는 프로그래밍 라이브러리를 제공한다.
TO의 좌표 (x와 y로, TO z)는 맞춤 개발 한 소프트웨어 프로그램 "TipControl"에 전달됩니다. 4는 그래픽 사용자 인터페이스의 스크린 샷을 보여줍니다. 이 소프트웨어는 윈도우의 "시작"버튼이 활성화됩니다. 활성화 후 (τ = 0) 소프트웨어가 모든 V의 X를 설정 – V y를 – V z를 전압 범위 ± 10 V (16)에서 (RVS에 -voltages다음 식에 따라 비트 해상도, 승압 당 50 밀리 초 지연)  등의 C, X, C의 y는, C의 Z는 SPM 팁의 1 Å 변위에 TO의 변위의 5cm 변환 요인이있는 곳. 인자 P는 X (t), y를 P (t) 쪽의 Z (t)는 X 방향의 상태에 의해 정의 된 값이, Y- 소프트웨어 윈도우의 Z-체크 박스. 상자가 다음 해당 페이지 (t)를 확인하면 "일시 중지"버튼을 소프트웨어 창을 누를 때 순간 0으로 설정 1. 모든 페이지 (t)를 설정한다. 즉, 일시적으로 선단부의 위치를 "고정"하기 위해 조작 할 수있다. 소프트웨어 창에서 "모두 다시 설정"버튼을 누르면 V의 X를 설정 – V y를 – V의 Z는 SPM 소프트웨어에 의해 정의 된 초기 위치로 팁을 반환 제로로 -voltages. 소프트웨어 윈도우 캘리포니아에있는 텍스트 필드에 "RVS을 수동으로 명령" , v를 y를 – – n은 V X의 어떤을 설정할 수, V y를 – -, V의 z는 ± 10 V는 V x의 허용 범위의 값으로 -voltages, V z를가 추가됩니다 RVS에 의해 생성 -voltages U 자하는 X – Y U – 가산 증폭기를 통한 전자의 SPM U Z – 출력 전압 신호들 (1, 50 kHz의 대역폭, 출력 범위 ± 10 V 이득).
등의 C, X, C의 y는, C의 Z는 SPM 팁의 1 Å 변위에 TO의 변위의 5cm 변환 요인이있는 곳. 인자 P는 X (t), y를 P (t) 쪽의 Z (t)는 X 방향의 상태에 의해 정의 된 값이, Y- 소프트웨어 윈도우의 Z-체크 박스. 상자가 다음 해당 페이지 (t)를 확인하면 "일시 중지"버튼을 소프트웨어 창을 누를 때 순간 0으로 설정 1. 모든 페이지 (t)를 설정한다. 즉, 일시적으로 선단부의 위치를 "고정"하기 위해 조작 할 수있다. 소프트웨어 창에서 "모두 다시 설정"버튼을 누르면 V의 X를 설정 – V y를 – V의 Z는 SPM 소프트웨어에 의해 정의 된 초기 위치로 팁을 반환 제로로 -voltages. 소프트웨어 윈도우 캘리포니아에있는 텍스트 필드에 "RVS을 수동으로 명령" , v를 y를 – – n은 V X의 어떤을 설정할 수, V y를 – -, V의 z는 ± 10 V는 V x의 허용 범위의 값으로 -voltages, V z를가 추가됩니다 RVS에 의해 생성 -voltages U 자하는 X – Y U – 가산 증폭기를 통한 전자의 SPM U Z – 출력 전압 신호들 (1, 50 kHz의 대역폭, 출력 범위 ± 10 V 이득).
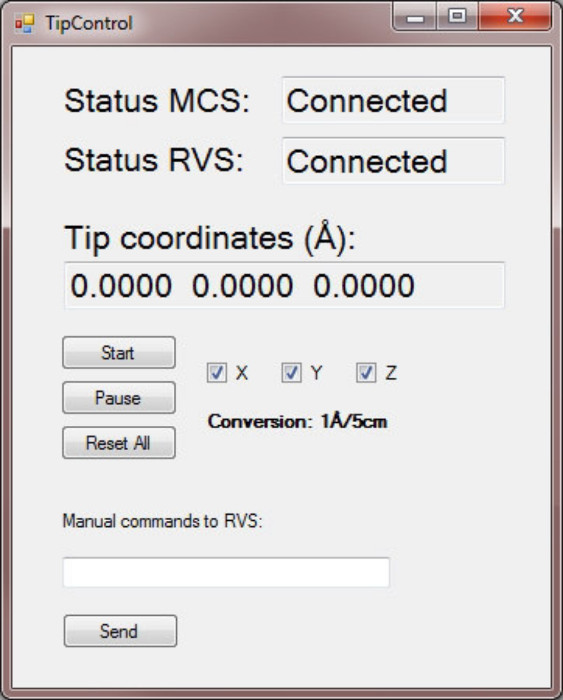
도 인터페이스 윈도우의 4 샷. 두 지표 MCS와 RVS 시스템과의 연결 상태를 나타낸다. 체크 박스가 선택된 공간 축을 따라 손으로 제어를 활성화하는 데 사용됩니다. 버튼 "시작"그림에 표시된 방식에 따라 MCS, TipControl와 RVS 사이의 데이터 흐름을 시작합니다 3. 버튼 "일시 중지"데이터 흐름을 정지합니다. 버튼 "모든 재설정"는 영 (0)에 전압 모든 RVS을 설정합니다.= "https://www.jove.com/files/ftp_upload/54506/54506fig4large.jpg"대상 = "_ 빈">이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
실험 데이터의 시각화 (팁 궤도, I, Δf에) 헤드 마운트 디스플레이 (HMD)가 사용된다. HMD는 입체 뷰 (- 각각의 눈에 대한 절반, 75 Hz에서 1,920 X 1,080 픽셀 분할 HD 디스플레이)를 제공합니다. 전용 IR 카메라 HMD의 표면에 고정 IR-LED를 이용하여 3 차원 공간에서 HMD의 위치 및 방향을 추적한다. HMD 추적 시스템은 운전자가 자신의 머리를 켜거나 단순히 본체를 이동하여 3 차원 가상 현실 장면 내부 뷰를 변경할 수있다.
맞춤 작성된 소프트웨어 "VRinterface"는 SPM과 MCS에서 모두 데이터를 수집의 OpenGL을 사용하여 3D 장면을 렌더링하고 HMDS 소프트웨어 개발 키트 (SDK)의 도움 HMD에 표시. VRinterface는 문의 선단의 실제 X, Y, Z 좌표를 검색I와 Δf에 신호가 SPM 전자 (대기 시간 ≈ 250 밀리 초)의 출력에서 직접 읽을 동안 팁 소프트웨어 (몇 밀리 초 지연). 그림 5는 HCM시 HMD 입고 운영자가 볼 때 3D 가상 장면의 스크린 샷을 보여줍니다. 3 차원 가상 장면 내부 팁 정점 흰색 영역으로 렌더링됩니다. 기록 된 팁 궤적의 착색하거나 로그 (I (X, Y, z)) 또는 Δf와 (x, y, z)의 값을 반영한다. 로그 사이 (I (X, Y, z)) 또는 Δf와 (x, y, z)의 색상 모드를 전환하는 버튼을 누르면 의해 수행된다. 또 다른 버튼을 눌러 기록 (및 표시) 실험 팁 궤적 데이터의 시작합니다. 다시 누를 때 버튼을 누르면 녹음을 중지합니다. 가상 장면은 조작하는 동안 시각 보조로 사용되는 정적 PTCDA 분자를 나타낸다. 운영자는 키보드의 버튼을 사용하여 표면에 실제 분자의 배향에 맞게 수동으로 방향을 정렬.
주의 : 때문에 헤드 tHMD의 랙은 또한 다음의 위치를 추적하는 IR 광을 사용하기 때문에 그것이 MCS 방해 할 수 있고, IR-LED가에 의존한다. 따라서 TO는 MCS에서 인식 할 수있는 독특한 모양을 가지고있다. 이 MCS는 TO과 HMD의 IR-LED가에서 오는 사람들로부터 오는 신호를 구별하는 데 도움이됩니다.
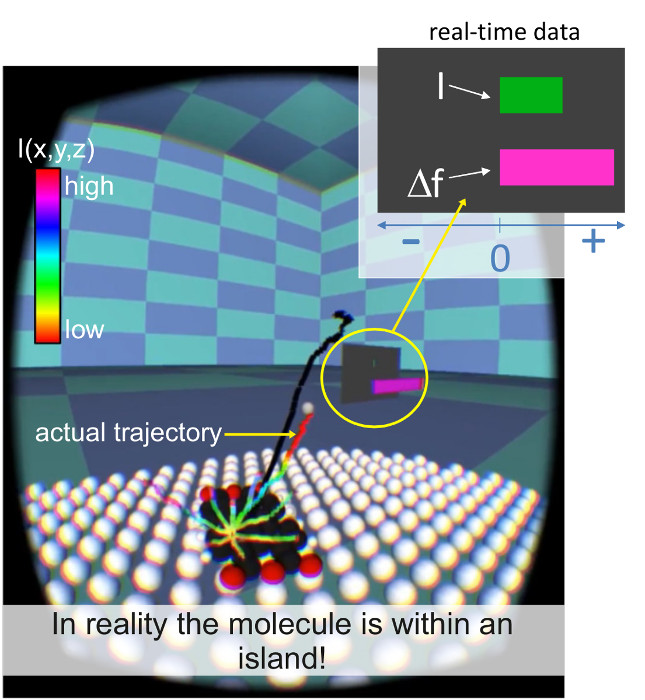
3 차원 가상 장면의 그림 5. S의 creenshot는 HCM시 HMD의 운영자에게 표시됩니다. 흰색 분야의 세트는 모델의 Ag (111) 표면을 형성한다. 모델 표면의 방향이 반드시 샘플의 방향과 일치하지 않을 수 있습니다. PTCDA 분자의 모델은 모델 표면 위에 배치됩니다. C는 O, PTCDA의 H 원자는 각각 검은 색, 빨간색과 흰색으로 표시됩니다. 모델 분자의 편의와 방위각 방향의 목적을 위해 선택된 실제 분자의 배향에 맞게 조정될 수있다조작. 끝 위치는 최 팁 선단 원자를 나타내는 단일 흰색 영역으로 표시된다. 실시간 I (x, y, z) 및 Δf에은 (X, Y, Z)의 데이터는 선단 옆에 배치 막대 표시로 표시된다. 현재 실행 조작이 그 색 나타내는 3 차원 궤적으로서 표시되는 바와 아니라 기록하거나 로그 (I (X, Y, z)) 또는 궤적의 대응하는 위치에서 측정 Δf에 (X, Y, Z) 값. 그림은 로그 (I (X, Y, Z)) 신호로 착색되는 궤적을 보여줍니다. 색상 대비가 로그 (I (X, Y, Z))와 Δf에 (X, Y, Z) 버튼을 눌러로 모드를 전환 할 수 있습니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
