El microscopio sin contacto de baja temperatura de fuerza atómica / de efecto túnel (LT NC-AFM / STM, en el siguiente SPM simplemente llamado) es la herramienta de elección para la manipulación de precisión atómica de los átomos o moléculas individuales 1 – 3. manipulación basada en SPM se limita típicamente a dos dimensiones y consta de una serie de eventos de manipulación abruptos y con frecuencia estocásticos (saltos). Esto limita esencialmente el control sobre el proceso. Poner en contacto la molécula en cuestión por un único enlace químico en una posición bien definida atómico conduce a un enfoque que puede superar estas limitaciones 4 – 9. A lo largo de su manipulación en contacto con la molécula está conectado a la punta de SPM para que mover la molécula en las tres dimensiones por los desplazamientos correspondientes de la punta se hace posible. Esto crea la posibilidad de que diferentes procedimientos de manipulación complejas realizadas en el espacio 3D. Sin embargo, la manipulación de contacto puede ser hindered por la interacción de la molécula manipulada con la superficie y / o otras moléculas en sus alrededores, lo que puede crear fuerzas que son lo suficientemente grandes como para romper el contacto de la punta-molécula. Por lo tanto una trayectoria 3D en particular de la punta de SPM puede o no puede dar lugar a un evento de manipulación del éxito. por lo tanto surge la cuestión de cómo definir los protocolos que conducen a la finalización con éxito de la manipulación en las circunstancias cuando el enlace punta-molécula tiene una resistencia limitada, mientras que la interacción de la molécula manipulada con su entorno no son a priori bien caracterizados.
Aquí se aborda esta cuestión en el imaginables manera más intuitiva. Se deja que el experimentador para controlar los desplazamientos de la punta de SPM simplemente moviendo la mano 7. Esto se consigue mediante el acoplamiento del SPM a un sistema de captura de movimiento comercial, algunas de las especificaciones de los cuales se proporcionan a continuación. La ventaja de "manipulación controlada mano" (MCH) es en tque la capacidad del experimentador para probar diferentes trayectorias de manipulación rápida y aprender de su fracaso o el éxito.
La configuración HCM se ha utilizado para llevar a cabo un experimento de prueba de principio en el que una palabra ( "JÜLICH") fue estarcido en una capa cerrada de moléculas de perileno-3,4,9,10-tetracarboxílico dianhídrido (PTCDA) en Ag ( 111), la eliminación de 48 moléculas, uno por uno, con MCH 7. Elevación de una molécula a partir de las escinde la superficie sus enlaces de hidrógeno intermoleculares que se unen las moléculas en la monocapa 10. Típicamente, la fuerza total de las actuales enlaces intermoleculares excede la fuerza del enlace químico sencillo entre el átomo más exterior de la punta y un átomo de oxígeno carboxílico de PTCDA por el cual se pone en contacto la molécula (véase la Figura 1). Eso puede conducir a la ruptura del contacto de la punta-molécula y el siguiente fracaso del intento de manipulación. La tarea del investigador es así a DETERMIne una trayectoria punta que rompe los enlaces intermoleculares que resisten secuencialmente en vez de simultáneamente, por lo que la fuerza total aplicada a la punta de contactos de molécula nunca excede su fuerza.
Aunque la trayectoria deseada puede, en principio, ser simulado, debido al tamaño y la complejidad de los sistemas comprendidos las simulaciones necesarias tomarían un prohibitivamente gran cantidad de tiempo. En contraste con esto, el uso de HCM que era posible retirar la primera molécula después de 40 minutos. Hacia el final del experimento la extracción ya tomó mucho menos tiempo que confirma la eficacia del procedimiento de aprendizaje. Además, la precisión y versatilidad del método HCM se puso de manifiesto en el acto de la manipulación inversa cuando se utilizó una molécula extraída de la ubicación vecina para cerrar el vacío dejado después de la eliminación errónea de otra molécula de la monocapa.
enfoque de captura de movimiento, mientras que ser rápido e intuitivo, eslimitado a la generación de los datos de la punta en la trayectoria. Para mayor desarrollo sistemático de nuevos protocolos de manipulación molecular es igualmente importante ser capaz de ver los datos de trayectoria punta en tiempo real, así como para analizar los datos generados anteriormente. Por lo tanto, la funcionalidad de la configuración de HCM se mejora sustancialmente mediante la adición de gafas de realidad virtual que permiten que el experimentador para ver los datos representados en la escena virtual en 3D donde la trayectoria punta se ve aumentada por la corriente (I) y desplazamiento de frecuencia valores (Delta F) medida por el SPM en tiempo real 8 (véase más adelante). Además de eso, la escena de realidad virtual muestra un modelo de la molécula manipulada que sirve como una referencia escala visual. Así, la configuración HCM complementado por la interfaz de realidad virtual es apto para la cartografía sistemática del espacio trayectoria manipulación y refinamiento sucesivo de los protocolos de manipulación prometedores. Además de que el sistema también facilita la transferencia de conocimientos entre los different experimentos. Los párrafos siguientes dan una descripción de la configuración y algunas de sus especificaciones que son relevantes para los experimentos de manipulación.
Los experimentos se realizan en ultra-alto vacío (UHV) a una presión de base de 1 x 10 -10 mbar con una SPM comercial que consiste en una cámara de preparación y una cámara de análisis. La cámara de preparación está equipado con: Ar + fuente utilizada para pulverización catódica de la muestra, la transferencia de muestra a través de manipulador (permite el calentamiento y enfriamiento de una muestra), difracción de baja energía de electrones (LEED), una célula de Knudsen personalizado (de células K) que contiene polvo de PTCDA purificado por sublimación. La cámara de análisis está equipado con: LN 2 criostato baño con un volumen de 12 litros y un tiempo de retención de 46 horas, menciones criostato baño (5 l, 72 h), Besocke 11 de tipo escarabajo de SPM equipado con un sensor de sintonía tenedor 12 ( TFS) que consta de un tenedor de sintonía de cuarzo con una punta PtIr conectado eléctricamente (para el funcionamiento STM), Que se corte y afilado por un haz iónico concentrado (FIB) (Figura 2).
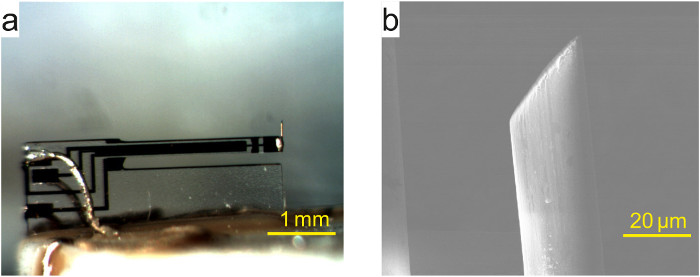
Figura 2. Ajuste del sensor tenedor. (A) Imagen de un sensor de sintonía tenedor comercial con punta PtIr adjunto. (B) Imagen SEM de la punta del ápice PtIr cortar con el FIB. Haga clic aquí para ver una versión más grande de esta figura.
La AFM se opera en el modo de frecuencia modulada (FM) 13 donde el TFS se excita a la resonancia (f 0 ≈ 31.080 Hz) con un piezo tramado. La señal piezoeléctrico del tenedor de ajuste oscilante se amplifica y se usa por un bucle de enganche de fase (PLL), lo que mantiene la amplitud de oscilación constante de la TFS y seguimiento de los cambios de its frecuencia de resonancia,? f = f – f 0, que se origina a partir del gradiente de la fuerza que actúa sobre la punta. Como se muestra en la Figura 3 la posición de la punta SPM es controlado por tensiones (u X, U y, u z) aplicado a un conjunto de ejes X, Y, Z-piezos (constantes piezoeléctricas a 5 K: x = 15, y = 16, z = 6 A / V). La U x, u Y, U -voltages z (± 10 V con una resolución de 20 bits) se generan en las salidas de electrónica de SPM. Ellos se amplifican aún más por un amplificador de alta tensión (HV) que tiene una tensión de salida máxima de ± 200 V.
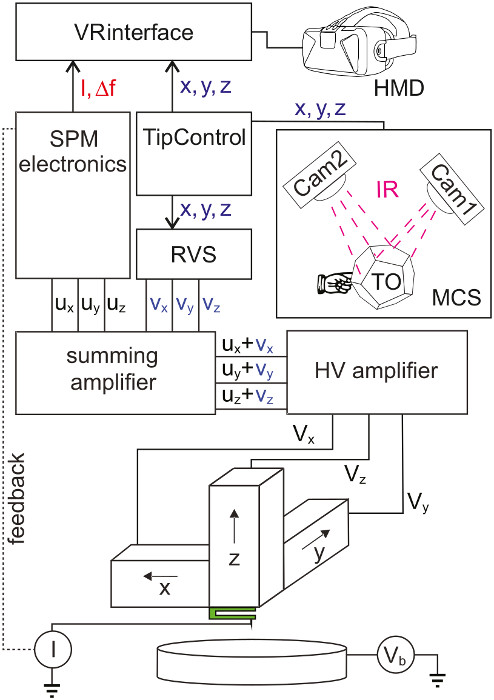
Figura 3. Esquema de la configuración del HCM. La posición del (objeto rastreado) A que tiene múltiples infrarrojos (IR) las fuentes instaladas en su superficie se realiza un seguimiento por dos cámaras de infrarrojos del sistema de captura de movimiento (MCS). TipControl por loftware obtiene el A coordenadas (x, y, z) de MCS y lo pasa a la fuente de voltaje remoto (RVS) que genera una serie de tensiones (v x, v y, v z) que se suma a las tensiones (U x , U y, u z) producido por la electrónica de SPM para el control de la posición de la punta de SPM. El voltaje agregado pasa a través de un amplificador de alta tensión (HV) y se aplica aún más al sistema piezo-posicionamiento de la punta de SPM. La configuración permite el control manual del posicionamiento de la punta cuando el bucle de realimentación SPM (FB) está abierta. La posición (x, y, z) de la punta, así como I (x, y, z) y? F (x, y, z) se pasan al software VRinterface que traza en la escena virtual en 3D visto por el operador el uso de la pantalla montada en la cabeza (HMD). Haga clic aquí para ver una versión más grande de esta figura.
La corriente de efecto túnel que fluye entre la punta y el SPMla superficie se mide mediante un amplificador de transimpedancia con una ganancia variable que varía de 1 x 10 03 al 01 x 10 9 V / A (ancho de banda en la ganancia de 1 x 10 9 V / A es 1 kHz). La salida del amplificador se alimenta en el circuito de retroalimentación STM (FB) para regular la altura de la punta por encima de la superficie en el modo de exploración de corriente constante. La estabilidad de la unión (con la oscilación TFS apagado) es 1 a 3 pm. La señal de oscilación piezoeléctrica de la TFS es amplificada en dos etapas: (1) preamplificador fijada al escudo LN 2 (ganancia de 1 x 10 8 V / A, ancho de banda de 20 kHz), y (2) amplificador de tensión externa con ganancia variable desde 1 x 10 1 5 x 10 4 y un ancho de banda de 1 MHz.
Para los experimentos de HCM, la configuración del SPM se amplía con: sistema de captura de movimiento (MCS), la fuente de voltaje controlable a distancia multicanal (RVS), amplificador sumador y la cabeza de realidad virtual montada pantalla (HMD). Todos los dispositivos mencionados, excepto el summing amplificador fueron adquiridos comercialmente.
MSC es un sistema de infrarrojos (IR) marcador de seguimiento que permite la resolución milímetro de desplazamientos espaciales a una velocidad de 100 Hz. El sistema consta de dos cámaras de infrarrojos, un objeto rastreable (A) y el software de control. El software MCS obtiene las direcciones x, y, z las coordenadas de la A en el espacio 3D mediante el análisis de sus imágenes obtenidas por las dos cámaras. MCS proporciona una librería de programación que permite el uso de las coordenadas de A en un programa de software por separado.
Las coordenadas de A (x A, Y OTROS, A z) se pasan a un programa de software desarrollado a medida "TipControl". La figura 4 muestra una captura de pantalla de la interfaz gráfica de usuario. El software se activa mediante el botón "Inicio" en la ventana. Después de la activación (τ = 0) el software y configura todas v x -, V y -, v z -voltages en RVS (rango de tensión de ± 10 V a los 16 añosresolución de bits, 50 mseg latencia por escalón de tensión) de acuerdo con la siguiente expresión  etc., donde c X, C y, c z son los factores que convierten a 5 cm del desplazamiento de A en 1 un desplazamiento de la punta del SPM. El factores p x (t), p y (t), p z (t) tienen valores definidos por el estado de la x, y, z-casillas de verificación en la ventana de software. Si la casilla está marcada, el correspondiente p (t) se establece en 1. Todos los p (t) se pone a 0 en el momento en el botón de "pausa" es presionado en la ventana del software. Eso permite que el operador temporalmente "congelar" la posición de la punta. Al pulsar el botón de "reset todos" en la ventana del software establece v x -, V y -, v z -voltages a cero que devuelve la punta a su posición inicial definida por el software de SPM. El campo de texto "comando manual de RVS" en la ventana del software ca n ser usada para configurar cualquiera de los v x -, V y -, v z -voltages a cualquier valor dentro del rango permitido de ± 10 V. La V x -, V y -, v z -voltages generada por RVS se añaden a la U x -, u y -, u señales de tensión -output z de la electrónica de GDS a través de un amplificador sumador (ganancia de 1, el ancho de banda de 50 kHz, rango de salida ± 10 V).
etc., donde c X, C y, c z son los factores que convierten a 5 cm del desplazamiento de A en 1 un desplazamiento de la punta del SPM. El factores p x (t), p y (t), p z (t) tienen valores definidos por el estado de la x, y, z-casillas de verificación en la ventana de software. Si la casilla está marcada, el correspondiente p (t) se establece en 1. Todos los p (t) se pone a 0 en el momento en el botón de "pausa" es presionado en la ventana del software. Eso permite que el operador temporalmente "congelar" la posición de la punta. Al pulsar el botón de "reset todos" en la ventana del software establece v x -, V y -, v z -voltages a cero que devuelve la punta a su posición inicial definida por el software de SPM. El campo de texto "comando manual de RVS" en la ventana del software ca n ser usada para configurar cualquiera de los v x -, V y -, v z -voltages a cualquier valor dentro del rango permitido de ± 10 V. La V x -, V y -, v z -voltages generada por RVS se añaden a la U x -, u y -, u señales de tensión -output z de la electrónica de GDS a través de un amplificador sumador (ganancia de 1, el ancho de banda de 50 kHz, rango de salida ± 10 V).
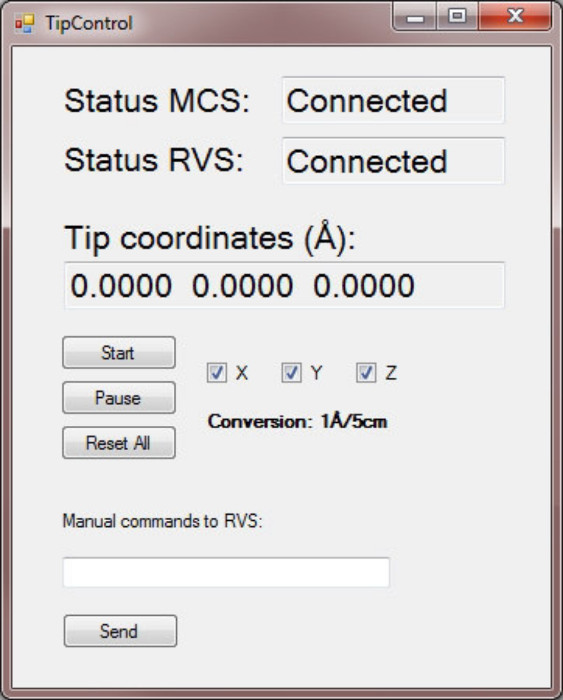
Figura 4. Captura de pantalla de la ventana de la interfaz. Dos indicadores muestran el estado de la conexión con los sistemas de SCV y vehículos recreativos. Las casillas de verificación se utilizan para activar a mano de control a lo largo de ejes espaciales seleccionados. El botón de "Inicio" inicia el flujo de datos entre MCS, TipControl y RVS según el esquema que se muestra en la Figura 3. Botón de "pausa" se detiene el flujo de datos. Botón "Reset All" establece todas las tensiones de RVS a cero.= "Https://www.jove.com/files/ftp_upload/54506/54506fig4large.jpg" target = "_ blank"> Haga clic aquí para ver una versión más grande de esta figura.
Para la visualización de los datos experimentales (trayectoria punta, I,? F) se usa un casco de realidad virtual (HMD). El HMD proporciona una visión estereoscópica (pantalla dividida HD – una mitad para cada ojo, 1.920 x 1.080 píxeles a 75 Hz). Una cámara de infrarrojos dedicado un seguimiento de la posición y orientación del HMD en el espacio 3D usando LEDs IR fijos en la superficie de HMD. El sistema de seguimiento de HMD permite al operador cambiar la vista dentro de la escena de realidad virtual 3D por un giro de la cabeza o simplemente moviendo su cuerpo.
El software a medida escrita "VRinterface" recoge los datos tanto de SPM y MCS, la hace en la escena 3D usando OpenGL y lo muestra en el HMD con la ayuda del kit de desarrollo de software de HMD (SDK). VRinterface recupera las direcciones x real, y-, z las coordenadas de la punta directamente de lasoftware de punta (unos pocos milisegundos de latencia), mientras que las señales de E y Delta F se leen directamente de las salidas de la electrónica de SPM (latencia ≈ 250 ms). Figura 5 muestra una captura de pantalla de la escena virtual en 3D como se ve por el Operador que desgasta HMD durante HCM. Dentro de la escena virtual en 3D del ápice punta se representa como una esfera blanca. La coloración de las trayectorias de punta grabadas refleja los valores de cualquiera de log (I (x, y, z)) o? F (x, y, z). El cambio entre log (I (x, y, z)) o? F (x, y, z) los modos de color se realiza mediante la pulsación de un botón. Otro botón inicia la grabación (y reproducción) de los datos de trayectoria punta experimentales. Cuando se pulsa de nuevo el botón se detiene la grabación. La escena virtual también muestra una molécula PTCDA estática que se utiliza como una ayuda visual durante la manipulación. El operador alinea manualmente su orientación para adaptarse a la orientación de la molécula real en la superficie mediante el uso de botones en un teclado.
Precaución: Debido a la cabeza ttrasiego de HMD se basa en IR-LED, que puede interferir con el MCS, ya que también utiliza luz infrarroja para rastrear la posición de AL. Por lo tanto para tiene que tener una forma única reconocida por el MCS. Esto ayuda a MCS para discriminar entre las señales que provienen de TO y los que vienen de IR-LED de HMD.
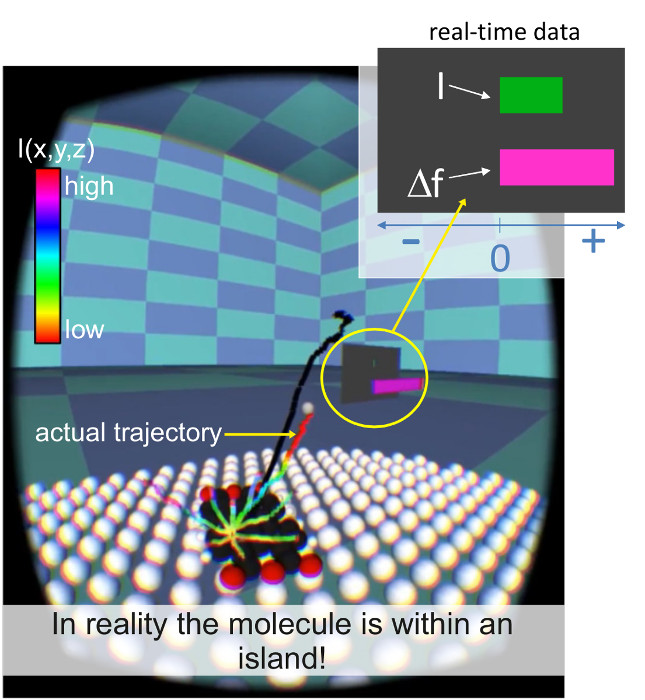
Figura 5. S creenshot de la escena virtual en 3D muestra al operador en HMD durante HCM. Un conjunto de esferas blancas forma un modelo Ag (111) de superficie. La orientación de la superficie del modelo puede no coincidir con la orientación de la muestra. Un modelo de la molécula PTCDA se coloca por encima de la superficie del modelo. C, O, átomos de H de PTCDA se muestran en negro, rojo y blanco, respectivamente. A los efectos de la orientación azimutal conveniencia de la molécula modelo se puede ajustar para adaptarse a la orientación de la molécula verdadera elegidopara la manipulación. La posición de la punta está marcado por una sola esfera blanco que representa el átomo de punta de vértice más exterior. El tiempo real I (x, y, z) y? F (z, y, x) los datos se muestran como indicadores de barra colocados junto a la punta. Grabada previamente, así como las manipulaciones ejecutadas actualmente se muestran como trayectorias 3D cuyo color representa o log (I (x, y, z)) o (x, y, z) los valores medidos? F en las posiciones de la trayectoria correspondiente. La figura muestra las trayectorias que son de color con (, Y, I (x z)) de la señal de registro. El contraste de color se puede cambiar entre log (I (x, y, z)) y? F (x, y, z) los modos de pulsación de un botón. Haga clic aquí para ver una versión más grande de esta figura.
