Den lave temperatur ikke-kontakt atomic force / scanning tunneling mikroskop (LT NC-AFM / STM, i det følgende blot betegnes SPM) er et oplagt middel for atomisk præcis manipulation af individuelle atomer eller molekyler 1 – 3. SPM-baseret manipulation er typisk begrænset til to dimensioner og består af en serie af pludselige og ofte stokastiske manipulation hændelser (hopper). Dette begrænser i det væsentlige den kontrol over processen. Kontakt molekylet pågældende med en enkelt kemisk binding ved en veldefineret atomare stilling fører til en tilgang, der kan overvinde disse begrænsninger 4 – 9. Igennem hele sin manipulation den kontaktede molekyle er forbundet til SPM spidsen, så bevægelse af molekylet i alle tre dimensioner ved passende forskydninger af spidsen bliver mulig. Dette skaber mulighed for forskellige komplekse manipulation procedurer udføres i 3D-rum. Men kontakttrinnet manipulation kan være hindered af vekselvirkninger mellem manipuleret molekyle med overfladen og / eller andre molekyler i omgivelserne, hvilket kan skabe kræfter, der er store nok til at bryde spidsen-molekylet kontakt. Derfor en bestemt 3D bane SPM spidsen kan eller ikke kan resultere i en vellykket manipulation begivenhed. En Spørgsmålet er derfor, hvordan man definerer protokoller, der fører til en vellykket gennemførelse af manipulation i de omstændigheder, når spidsen-molekylet obligation har en begrænset styrke, mens samspillet mellem den manipulerede molekyle med dens miljø er ikke en-priori godt karakteriseret.
Her dette spørgsmål er kontaktet i den mest intuitive måde kan forestille sig. Eksperimentatoren får lov til at styre forskydningerne af SPM spids simpelthen ved at bevæge hånden 7. Dette opnås ved kobling af SPM til en kommerciel motion capture-system, nogle af de specifikationer, som er tilvejebragt nedenfor. Fordelen ved "hånd styret manipulation" (HCM) er i than forsøgslederen evne til at afprøve forskellige manipulation baner hurtigt og lære af deres fejl eller succes.
Den HCM setup er blevet brugt til at foretage en proof-of-principle eksperiment, hvor et ord ( "Julich") blev stencilerede i et lukket lag af perylen-3,4,9,10-tetracarboxylsyre dianhydrid (PTCDA) molekyler på Ag ( 111), fjernelse af 48 molekyler, én efter én, med HCM 7. Løfte et molekyle fra overfladen spalter dens intermolekylære hydrogenbindinger, som binder molekylerne i monolaget 10. Typisk den samlede styrke af de foreliggende intermolekylære bindinger overstiger styrken af enkelt kemisk binding mellem den yderste atom i spidsen og en carboxylsyre oxygenatom af PTCDA hvorved molekylet bringes i kontakt (se figur 1). Det kan føre til brud på tip-molekylet kontakt og følgende svigt af manipulation forsøget. Eksperimentatoren opgave er således at determine et tip trajektorie, som bryder de modsætter intermolekylære bindinger sekventielt snarere end samtidigt, således at den samlede kraft, der påføres spidsen-molekylet kontakt aldrig overstiger dets styrke.
Selvom den ønskede bane kan i princippet simuleres, på grund af størrelsen og kompleksiteten af systemet involveret de nødvendige simuleringer ville tage et uoverkommeligt stor mængde tid. I modsætning til dette, ved hjælp af HCM var det muligt at fjerne den første molekyle i det 40. minut. Mod slutningen af eksperimentet ekstraktionen tog allerede meget mindre tid som bekræfter effektiviteten af proceduren indlæring. Desuden blev nøjagtigheden og alsidigheden af HCM-metoden fremgår i den handling af omvendt manipulation, når et molekyle udvundet fra den nærliggende placering blev brugt til at lukke tomrummet efter den fejlagtige fjernelse af et andet molekyle fra monolag.
Motion capture tilgang, og samtidig være hurtig og intuitiv, erbegrænset til frembringelsen af tip-bane-data. For yderligere systematisk udvikling af nye molekylære manipulation protokoller er det lige så vigtigt at kunne se tip bane data i realtid samt at analysere tidligere genererede data. Derfor er funktionaliteten af HCM setup forbedret væsentligt ved tilsætning virtual reality beskyttelsesbriller, der tillader eksperimentator at se de afbildede data i 3D virtuelle scene, hvor spidsen bane forøges af den strøm (I) og frekvens skift (delta f) værdier målt af SPM i realtid 8 (se nedenfor). Ud over det, virtual reality scene viser en model af det manipulerede molekyle, der tjener som reference visuel skala. Således HCM setup komplimenteres af den virtuelle virkelighed interface er velegnet til systematisk kortlægning af manipulation bane plads og successiv forfinelse af de lovende manipulation protokoller. Udover at systemet letter også videnformidling mellem different eksperimenter. De følgende afsnit giver en beskrivelse af setup og nogle af dens specifikationer, der er relevante for manipulation eksperimenter.
Eksperimenterne udføres i ultrahøjt vakuum (UHV) ved en base tryk på 1 x 10 -10 mbar med en kommerciel SPM bestående af et præparat kammer og en analyse kammer. Præparatet kammer er udstyret med: Ar + kilde bruges til prøve sputtering, prøve overførsel via manipulator (tillader opvarmning og afkøling af en prøve), lavenergi elektron diffraktion (LEED), en tilpasset Knudsen-celle (K-celle) indeholder PTCDA pulver oprenset ved sublimation. Analysen kammer er udstyret med: LN 2 bad kryostat med et volumen på 12 L og en holdetid på 46 timer, LHE bad kryostat (5 L, 72 timer), Besocke 11 bille-typen SPM udstyret med en stemmegaffel sensor 12 ( TFS) bestående af en kvarts stemmegaffel med en elektrisk forbundet PtIr spids (for STM drift), Som skæres og slibes en fokuseret ionstråle (FIB) (figur 2).
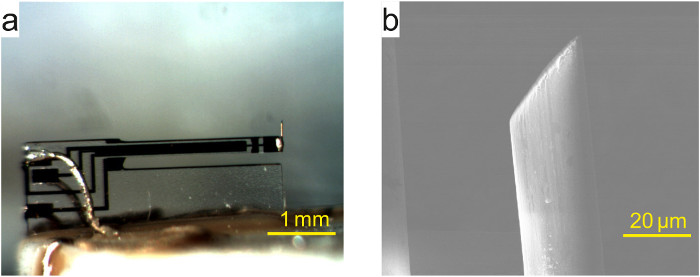
Figur 2. Tuning fork sensor. (A) Billede af en kommerciel stemmegaffel sensor med vedhæftet PtIr spids. (B) SEM billede af PtIr spids spids skæres med FIB. Klik her for at se en større version af dette tal.
AFM drives i frekvens-moduleret (FM) forløb 13, hvor TFS er spændt på resonans (f 0 ≈ 31.080 Hz) med en dither piezo. Det piezoelektriske signal af den oscillerende stemmegaffel forstærkes og anvendes af en faselåst sløjfe (PLL), som holder amplituden af TFS s svingning konstant og sporer ændringer its resonansfrekvens, △ f = f – f 0, der stammer fra gradienten af den kraft, der virker på spidsen. Som vist i figur 3 SPM spids position styres af spændinger (u x, u y, u z) påført på et sæt af x-, y-, z-piezos (piezo konstanter ved 5 K: x = 15, y = 16, z = 6 Å / V). U x, er u y, u z -voltages (± 10 V ved 20 bit opløsning), der genereres ved SPM elektronik udgange. De er yderligere forstærket ved en høj spænding (HV) forstærker, der har en maksimal udgangsspænding på ± 200 V.
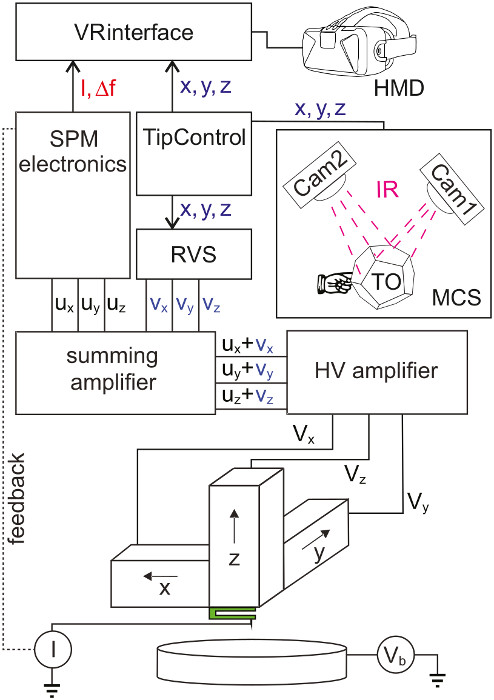
Figur 3. Skematisk af HCM opsætning. Placeringen af (sporet objekt) TIL der har flere (infrarød) IR kilder installeret på dens overflade er spores af to infrarøde kameraer af motion capture-system (MCS). TipControl såftware opnår TO koordinater (x, y, z) af MCS og sender det til den eksterne spændingskilde (RVS), som genererer et sæt af spændinger (v x, y, v z), som er summeret med spændingerne (u x , u y, u z) frembragt af SPM elektronik til styring af SPM spids position. Den ekstra spænding passerer gennem en højspænding (HV) forstærker og er yderligere anvendt på piezo-positionering system SPM spids. Opsætningen giver mulighed for manuel styring af spidsen positionering, når SPM feedback (FB) loop er åben. (X, y, z) position af spidsen samt I (x, y, z) og Af-(x, y, z) føres til den VRinterface software, der plotter det i 3D virtuelle scene set fra brugeren iført displayet hovedmonteret (HMD). klik her for at se en større version af dette tal.
Den tunneling strøm, der flyder mellem SPM spids ogoverfladen måles af en overføringsimpedansforstærker med en variabel forstærkning, der varierer fra 1 x 10 3 til 1 x 10 9 V / A (båndbredde ved forstærkning 1 x 10 9 V / A er 1 kHz). Udgangssignalet fra forstærkeren tilføres STM feedback (FB) loop til regulering spidsen højde over overfladen i konstant strøm scanningsfunktion. Stabiliteten af forbindelsen (med TFS oscillation slukket) er 1-3 pm. Det piezoelektriske oscillationssignal af TFS amplificeres i to trin: (1) forforstærker fastgjort til LN2 skjold (vinde 1 x 10 8 V / A, båndbredde 20 kHz), og (2) ekstern spænding forstærker med variabel forstærkning fra 1 x 10 1 til 5 x 10 4 og en båndbredde på 1 MHz.
For HCM eksperimenter er SPM setup udvidet med: motion capture-system (MCS), fjernstyret multikanal spænding kilde (RVS), opsummering forstærker og virtual reality hovedmonteret display (HMD). Alle de børsnoterede enheder undtagen summing forstærker erhvervet kommercielt.
MSC er en infrarød (IR) markør-tracking system, der tillader millimeter opløsning af rumlige forskydninger med en hastighed på 100 Hz. Systemet består af to IR kameraer, en sporbar objekt (TO) og styresoftware. MCS software opnår x-, y-, z-koordinater for i 3D rummet ved at analysere dets billeder opnået ved de to kameraer. MCS giver et programmeringssprog bibliotek, som tillader brug af koordinaterne for TO i et separat program.
Koordinaterne for TO (x TO, y TO, z TO) gives videre til en specialfremstillet udviklet software program "TipControl". Figur 4 viser et skærmbillede af den grafiske brugergrænseflade. Softwaren aktiveres af knappen "start" i vinduet. Efter aktivering (τ = 0) softwaren indstiller al v x -, v y -, v z -voltages på RVS (spændingsområde ± 10 V ved 16bit opløsning, 50 msek latens per spænding trin) efter følgende udtryk  etc., hvor Cx, c y, c z er de faktorer, der konverterer 5 cm af forskydningen af TO i 1 Å forskydning af SPM spids. Den faktorer p x (t), p y (t), s z (t) har værdier defineret af status for x-, y-, z-afkrydsningsfelter i softwaren vinduet. Hvis feltet er markeret derefter den tilsvarende p (t) er sat til 1. Alle p (t) er sat til 0 i det øjeblik, når der trykkes på knappen "pause" i softwaren vinduet. Det kan føreren midlertidigt "fryse" positionen af spidsen. Ved at trykke på "reset alle" knappen i softwaren vinduet sætter v x -, v y -, v z -voltages til nul som returnerer spidsen til udgangsstillingen defineret af SPM software. Tekstfeltet "manuel kommando til RVS" i softwaren vinduet ca n bruges til at indstille en af v x -, v y -, v z -voltages til nogen værdi i det tilladte interval på ± 10 V. v x -, v y -, -voltages v z genereret af RVS tilføjes til u x -, u y -, u z -udgangen spændingssignaler af SPM elektronik via en opsummering forstærker (vinde en, båndbredde 50 kHz, ydelsesområde ± 10 V).
etc., hvor Cx, c y, c z er de faktorer, der konverterer 5 cm af forskydningen af TO i 1 Å forskydning af SPM spids. Den faktorer p x (t), p y (t), s z (t) har værdier defineret af status for x-, y-, z-afkrydsningsfelter i softwaren vinduet. Hvis feltet er markeret derefter den tilsvarende p (t) er sat til 1. Alle p (t) er sat til 0 i det øjeblik, når der trykkes på knappen "pause" i softwaren vinduet. Det kan føreren midlertidigt "fryse" positionen af spidsen. Ved at trykke på "reset alle" knappen i softwaren vinduet sætter v x -, v y -, v z -voltages til nul som returnerer spidsen til udgangsstillingen defineret af SPM software. Tekstfeltet "manuel kommando til RVS" i softwaren vinduet ca n bruges til at indstille en af v x -, v y -, v z -voltages til nogen værdi i det tilladte interval på ± 10 V. v x -, v y -, -voltages v z genereret af RVS tilføjes til u x -, u y -, u z -udgangen spændingssignaler af SPM elektronik via en opsummering forstærker (vinde en, båndbredde 50 kHz, ydelsesområde ± 10 V).
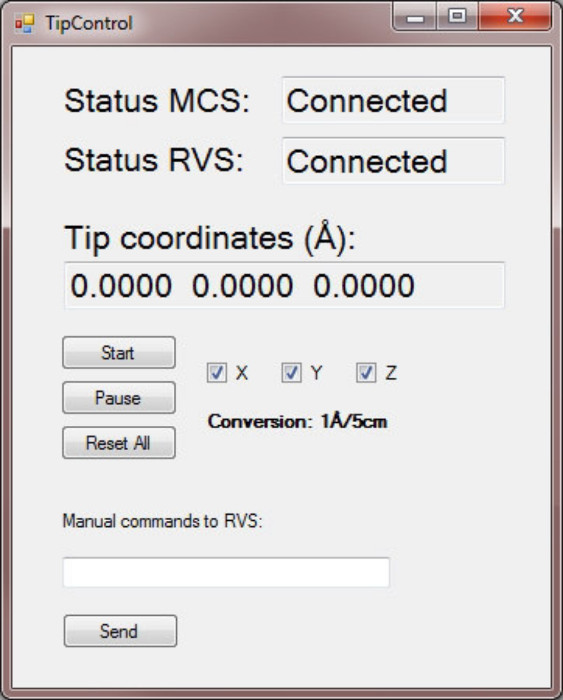
Figur 4. Skærmbillede af grænsefladen vinduet. To indikatorer udviser status for forbindelse med MCS og RVS-systemer. Afkrydsningsfelter bruges til at aktivere hånd-kontrol langs udvalgte rumlige akser. Knappen "Start" indleder datastrømmen mellem MCS, TipControl og RVS ifølge skemaet vist i figur 3. Knappen "Pause" stopper datastrømmen. Button "Reset All" sætter alle RVS spændinger til nul.= "Https://www.jove.com/files/ftp_upload/54506/54506fig4large.jpg" target = "_ blank"> Klik her for at se en større version af dette tal.
For visualisering af de eksperimentelle data (tip bane, jeg, Af-) anvendes et hoved monteret display (HMD). Den HMD giver en stereoskopisk visning (split HD-skærm – den ene halvdel for hvert øje, 1.920 x 1.080 pixel ved 75 Hz). En dedikeret IR kamera sporer positionen og orienteringen af HMD i 3D rummet ved hjælp af IR-lysdioder fast på overfladen af HMD. Det HMD tracking system gør det muligt for operatøren at ændre visningen i 3D virtual reality scene med en tur af deres hoved eller blot at flytte deres krop.
Den brugerdefinerede skrevet software "VRinterface" indsamler data både fra SPM og MCS, gør det i 3D scene ved hjælp OpenGL og viser det i HMD med hjælp af HMDS software development kit (SDK). VRinterface henter den faktiske x-, y-, z-koordinater af spidsen direkte fratip software (få millisekund latenstid), mens I og bf signaler aflæses direkte fra udgangene på SPM elektronik (latenstid ≈ 250 ms). Figur 5 viser et skærmbillede af 3D virtuelle scene set af operatøren iført HMD under HCM. Inde i 3D virtuelle scene spidsen toppunkt er gengivet som et hvidt rum. Farvning af de registrerede tip baner afspejler værdier af enten log (I (x, y, z)) eller delta f (x, y, z). Skift mellem log (I (x, y, z)) eller Af-(x, y, z) farvetilstande gøres ved at trykke på en knap. En anden knap starter optagelsen (og vise) af eksperimentelle tip bane data. Når der trykkes igen på knappen stopper optagelsen. Den virtuelle scene viser også en statisk PTCDA molekyle, der anvendes som en visuel hjælp under manipulation. Operatøren justerer dens orientering manuelt at passe orienteringen af den virkelige molekyle på overfladen ved hjælp af knapperne på tastaturet.
Advarsel: Fordi hovedet treoler af HMD afhængig IR-lysdioder, det kan forstyrre MCS, da den også bruger IR-lys til at spore placeringen af TO. Derfor at skal have en unik form anerkendt af MCS. Dette hjælper MCS at skelne mellem de signaler, der kommer fra TO, og dem, der kommer fra IR-lysdioder af HMD.
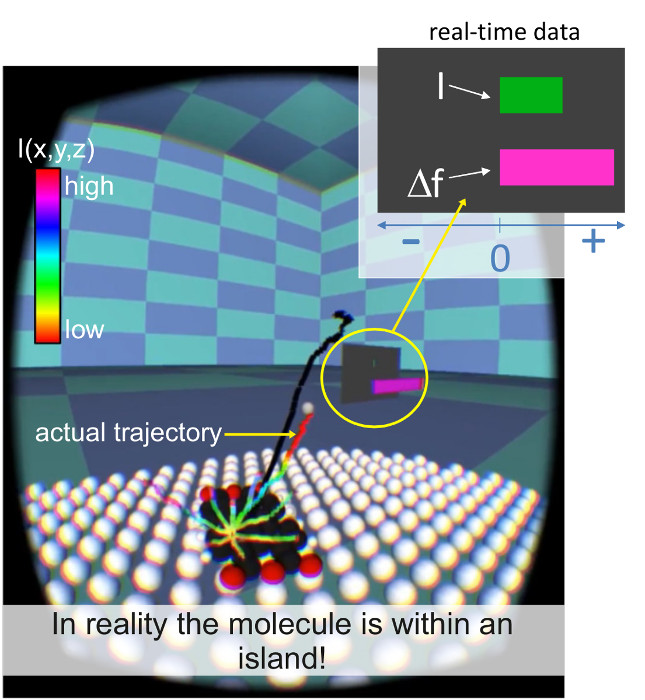
Figur 5. S creenshot af 3D virtuelle scene vises til operatøren i HMD under HCM. Et sæt hvide kugler danner en model Ag (111) overflade. Orientering af modellen overflade kan ikke nødvendigvis sammenfaldende med orienteringen af prøven. En model af PTCDA molekylet er placeret over modellen overflade. C, O, H atomer af PTCDA er vist i sort, rød og hvid hhv. Med henblik på bekvemmelighed azimutale orientering af modellen molekylet kan justeres til at passe til orienteringen af den reelle molekyle valgtfor manipulation. Spidsen position er markeret med en enkelt hvid sfære repræsenterer den yderste spids spids atom. Realtids I (x, y, z) og delta f (x, y, z) data vises som stavindekser placeret ved siden af spidsen. Tidligere registreret samt de aktuelt udførte manipulationer vises som 3D-baner, hvis farve repræsenterer enten log (I (x, y, z)), eller bf (x, y, z) værdier målt ved tilsvarende positioner af bane. Figuren viser baner, der er farvet med log (I (x, y, z)) signal. Farven kontrast kan skiftes mellem log (I (x, y, z)) og Af-(x, y, z) tilstande ved tryk på en knap. Klik her for at se en større version af dette tal.
