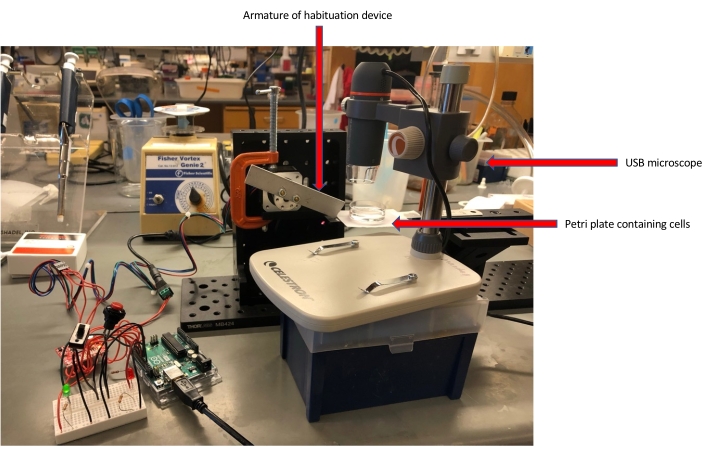
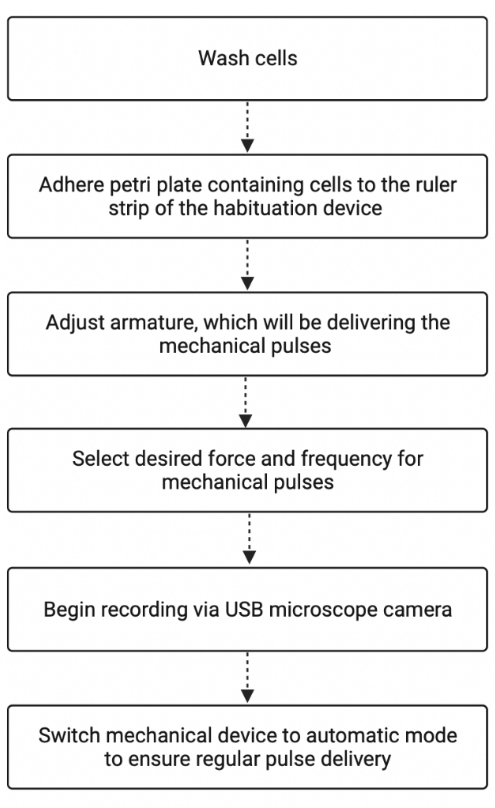
NOTA: Um resumo do fluxo de trabalho do experimento de habituação é mostrado na Figura 2. 1. Montagem do dispositivo de habituação Conecte o driver do motor ao motor (consulte a Figura 3).Conecte os dois fios rotulados A da placa do motorista aos fios azuis e vermelhos do motor. Conecte os dois fios rotulados B da placa do motorista aos fios verde e preto do motor.NOTA: Olhando para baixo na placa do motorista de cima com os fios do motor na parte superior, os quatro fios de entrada devem se conectar aos cabos do motor nesta ordem: azul, vermelho, preto e verde. Construa o circuito da breadboard mostrado na Figura 4, com especial cuidado para conectar os LEDs na polaridade correta. Conecte o Vcc (+5 V) da placa do motorista ao trilho superior do breadboard branco e o Gnd do quadro do motorista ao trilho inferior do breadboard. Conecte o solo da placa de pão ao pino de aterramento da placa microcontroladora. Conecte os fios de LED verde, LED vermelho, interruptor e botão, respectivamente, aos pinos digitais da placa microcontroladora 8, 9, 10 e 11. Conecte os pinos digitais 2 e 3 da placa do microcontrolador aos fios da placa do driver Step e Dir. Conecte os pinos digitais 4, 5, 6 e 7 da placa do microcontrolador aos fios da placa do driver.Conecte o Pin 4 ao MS1, conecte o Pin 5 ao MS2, conecte o Pin 6 ao MS3 e conecte o Pin 7 ao Enable. Ligue a placa do driver com uma fonte de alimentação de 12 V. Ligue a alimentação de 12 V à ficha do adaptador preto/verde ligada por dois fios vermelhos à placa do condutor do motor.NOTA: Não ligue a fonte de alimentação de 12 V à ficha da placa microcontroladora. Baixe o programa de controle (https://github.com/WallaceMarshallUCSF/StentorHabituation/blob/main/stentor_habituator_stepper_v7.ino) na placa microcontroladora. Use um cabo USB para conectar a placa microcontroladora a um computador, que também servirá como fonte de alimentação para a placa microcontroladora. Verifique se os controles de usuário estão funcionando.Confirme se o interruptor deslizante ativa e desativa o modo automático. No modo automático, o sistema dará um passo em intervalos regulares especificados pelo usuário (veja abaixo). Verifique se o LED verde acende quando o modo automático está aceso. Verifique se o LED vermelho pisca 1 s antes que o motor aplique um pulso. O LED vermelho é uma luz de aviso que indica quando o sistema está prestes a fornecer um pulso mecânico. Teste o botão vermelho, que aciona um passo micro de 1/16 toda vez que o botão é pressionado, independentemente de o sistema estar no modo automático. Figura 3: Componentes do dispositivo de habituação. Todos os componentes eletrônicos rotulados são necessários para montar a máquina. Por favor, clique aqui para ver uma versão maior desta figura. Figura 4: Esquema eletrônico. Este é o circuito na breadboard. Os fios que se conectam à placa microcontroladora são numerados conforme descrito no protocolo. D1 e D2 são os LEDs vermelhos e verdes, respectivamente, e são conectados ao solo através de 330 resistores Ω. Os dois interruptores são puxados para cima com resistores de 10 KΩ. Por favor, clique aqui para ver uma versão maior desta figura. 2. Configurando o experimento de habituação Obtenha o Stentor. Revestir uma placa de 35 mm com solução de poli-ornitina a 0,01%.Adicionar 3 ml da solução de poli-ornitina a 0,01% à placa e deixar durante a noite. Lave a placa duas vezes com água ultrapura e uma vez com água de nascente pasteurizada (PSW) (Tabela de Materiais). Adicionar 3,5 mL de PSW à placa de 35 mm. Lave o Stentor em uma placa de 6 poços (Tabela de Materiais).Adicione 3 mL de PSW ao primeiro poço e 5 mL de PSW ao segundo e terceiro poços. Use uma pipeta P1.000 para adicionar 2 mL de Stentor de um prato de cultura ao primeiro poço da placa de 6 poços. Identifique o Stentor individual com um microscópio estéreo (Tabela de Materiais) e, em seguida, use uma pipeta P20 para transferir 100 Stentor do primeiro poço para o segundo poço. Identifique o Stentor individual com um microscópio estéreo e, em seguida, use uma pipeta P20 para transferir 100 Stentor do segundo poço para o terceiro poço. Use uma pipeta P200 para transferir 100 Stentor em um volume total de 500 μL do terceiro poço da placa de 6 poços para a placa de 35 mm, de modo que o volume final na placa de 35 mm seja de 4 mL. Cole um pedaço (7 cm x 7 cm) de papel branco à régua de metal no dispositivo de habituação. Certifique-se de que a borda esquerda do papel esteja a 2 cm da extremidade da régua mais próxima da armadura. Use fita dupla face para aderir a parte inferior da placa de 35 mm ao centro do 2 em x 2 em papel no topo da régua no dispositivo de habituação. Deixe a placa de 35 mm no dispositivo de habituação por pelo menos 2 h (isso pode ser estendido para a noite) com a tampa fechada. Durante todo esse período de aclimatação, mantenha a placa em condições de luz ambiente que correspondam às condições experimentais de luz (ou seja, não submeta as células a flutuações de luz / escuridão). Além disso, certifique-se de que a placa não sofra perturbações mecânicas de empurrões acidentais. Centralize a câmera do microscópio USB (Tabela de Materiais) diretamente acima da placa de 35 mm do Stentor. Se necessário, coloque um suporte como uma caixa de ponta de pipeta sob a câmera de microscópio USB (barramento serial universal) para ajustar a altura. Alternativamente, um suporte de anel pode ser usado para ajustar a altura. Instale o aplicativo gravador de webcam em um laptop (Tabela de Materiais) e use-o para visualizar as células através da entrada do microscópio.Abra o aplicativo Gravador de webcam e selecione o microscópio USB no menu suspenso. Ajuste o foco na câmera do microscópio USB para que as células estejam claramente à vista. Ajuste a posição da câmera do microscópio USB para maximizar o número de células no campo de visão. Abra o monitor serial da placa microcontroladora: selecione Sem Fim de Linha e defina-o como 9.600 baud. Use o comando l no programa da placa microcontroladora para abaixar a armadura até que ela mal toque na régua. Use o comando r para levantar o braço, se necessário, para ajustar a posição exata.NOTA: Se a armadura estiver a uma distância significativa da régua, digite o comando d para desativar a corrente da bobina do motor para que o braço possa ser movido manualmente em direção à régua. Depois de mover o braço manualmente, use o comando e para ativar a corrente da bobina do motor e manter o braço travado na posição. Quando devidamente abaixada antes do início de um experimento, a ponta inferior da armadura deve estar a 1 cm de distância da borda esquerda da régua. A armadura fornecerá o pulso mecânico batendo na régua. Use o comando i para inicializar o modo automático no dispositivo de habituação. Insira o tamanho da etapa na linha de comando. O nível 5 é o menor passo e o nível 1 é o maior passo. O nível 4 é o tamanho do passo usado para experimentos de habituação de linha de base.NOTA: Um estímulo de Nível 5 resulta em um deslocamento para baixo da régua em ~0,5 mm; O nível 4 resulta em deslocamento descendente de ~1 mm; O nível 3 resulta em deslocamento descendente de ~2 mm; O nível 2 resulta em deslocamento descendente de ~3-4 mm; e o Nível 1 resulta em deslocamento descendente de ~8 mm. Um estímulo de Nível 5 resulta em uma força de pico descendente da armadura contra a régua de ~0,122 N; O nível 4 resulta em uma força de pico descendente de ~0,288 N; e o Nível 3 resulta em uma força de pico descendente de ~0,557 N. As forças descendentes geradas pelo Nível 1 e Nível 2 são mais difíceis de quantificar empiricamente com um dinamômetro devido às oscilações significativas da régua que ocorrem após o contato da armadura. Insira o tempo entre pulsos em minutos. O intervalo usado para experimentos de habituação basal é de 1 min. Comece a gravar um vídeo usando o aplicativo Gravador de webcam pressionando o botão vermelho de gravação. Em seguida, ligue o interruptor no aparelho de habituação para iniciar o experimento com a primeira entrega automatizada de pulsos mecânicos. 3. Analisando o vídeo do experimento Imediatamente antes que o primeiro pulso mecânico apareça no vídeo, pause e conte o número de Stentor que estão ancorados na parte inferior da placa de 35 mm e estendidos em uma forma alongada semelhante a uma trombeta (Figura 5A, Vídeo 1). Imediatamente após o primeiro pulso, conte o número de Stentor que estão ancorados no fundo da placa e contraídos em uma forma de bola (Figura 5B, Vídeo 1).NOTA: As células contraídas são facilmente discerníveis a partir de células alongadas porque o Stentor encurta o comprimento do seu corpo em mais de 50% dentro de 10 ms durante um evento de contração3. Divida a segunda contagem pela primeira contagem para determinar a fração de Stentor que se contraiu em resposta ao estímulo mecânico. Repita as etapas 3.1-3.3 para todos os pulsos mecânicos no vídeo do experimento. Figura 5: Stentor se contraindo após receber um estímulo mecânico. (A) Os Stentor estão em seu estado alongado e ancorados no fundo da placa de Petri. (B) O Stentor contraiu-se depois de receber uma estimulação mecânica de Nível 4 do dispositivo de habituação. As imagens foram obtidas com microscópio USB. Por favor, clique aqui para ver uma versão maior desta figura. Vídeo 1: Vídeo da contratação do Stentor. O Stentor recebe um estímulo mecânico de Nível 4 do dispositivo de habituação a cada minuto. Essas células ainda não se habituaram, então elas se contraem depois de receber o pulso. As células estão na placa de Petri colocada sobre o dispositivo de habituação. Clique aqui para baixar este vídeo.