역학 데이터에 따르면 전 세계적으로 매년 ~1,700만 건의 새로운 뇌졸중 사례가 발생하며 저소득 및 중간 소득 국가에서 발병률이 증가하고 있습니다1. 신규 확진자 수는 2030년까지 7,700만 명으로 증가할 것으로 추정2. 뇌졸중으로 인한 운동 장애는 종종 환자의 이동성과 일상 생활 활동 참여에 영향을 미쳐 삶의 질을 저하시킵니다. 전통적인 운동 재활에는 도수 치료가 포함되지만 지난 수십 년 동안 재활을 위한 로봇 시스템이 개발되었습니다. 이러한 시스템은 고강도, 용량, 정량화성, 신뢰성, 반복성및 유연성으로 치료를 제공할 수 있으며3 급성 및 만성 뇌졸중 환자 모두에게 효과적인 재활 치료로서의 잠재력을 보여주었습니다 4,5,6. 재활을 위한 로봇 시스템은 치료를 제공하는 것 외에도 환자의 움직임 운동학적/운동학적 데이터를 측정할 수 있는 센서를 장착할 수 있으므로 평가 도구로 사용할 수 있습니다 7,8. 상지 운동 재활의 경우, 이러한 데이터는 로봇 치료에 의해 유도된 환자의 운동 회복 수준을 평가하는 데 유용한 것으로 입증되었을 뿐만 아니라 전통적인 임상 평가9,10에 대한 보충 도구로 사용될 뿐만 아니라 뇌졸중11에서 운동 회복 과정에 대한 이해를 증진하는 데 기여했다. 12 건강한 피험자의 운동 및 운동 학습의 신경 제어 3,13,14. 결과적으로, 이러한 발견은 재활 치료를 강화하기 위한 기초를 제공하였다15.
지난 20년 동안 하지 신경 재활을 위한 많은 로봇 장치가 제안되었는데, 이는 걷는 동안 환자의 체중을 지탱하는 외골격(예: Lokomat16과 같은 러닝머신 위)에서 환자가 걷지 않고 발목, 무릎 또는 발을 운동할 수 있도록 하는 고정식 로봇 시스템(예: Rutgers Ankle17, 고성능 발목 재활 로봇(High-Performance Ankle Rehabilitation Robot)(18), 광주과학기술원(GIST) 발목/발 재활 로봇(19) 또는 환자가 지상 또는 러닝머신 위를 걸을 때 착용하는 작동식 외골격인 능동 발 보조기(예: Powered Gait Orthosis20 및 MIT Anklebot21). 하지 재활을 위한 로봇에 대한 리뷰는 22,23,4를 참조하십시오.
뇌졸중 환자에 대한 하지 재활을 위한 로봇 장치의 임상 연구 결과는 고무적이었으며, 이러한 시스템은 특정 장치 및 임상 프로토콜에 따라 관절의 운동 범위(ROM), 근력 또는 보행을 개선할 수 있음을 보여주었습니다(재활을 위한 하지 로봇의 효능에 대한 검토는 24,25 참조). 로봇 보조 치료가 신경가소성 변화를 촉진하여 궁극적으로 운동 능력을 향상시킨다는 가정이 있지만26 뇌졸중으로부터 운동 회복 과정이 정확히 어떻게 발생하는지, 그리고 어떤 로봇 훈련 프로토콜이 하지 운동 능력의 회복 과정을 최적화하는지는 대부분 불분명하다. 실제로, 재활 로봇의 개발이 증가하는 것(학술 연구자 또는 상업 단체에 의한)과 운동 회복의 기초가 되는 신경생리학적 메커니즘에 대한 제한된 이해 사이에는 상당한 격차가 커지고 있다4. 내장된 센서로 측정한 운동 운동학 또는 관절 토크의 측정은 환자가 하지 운동 능력27,28,29을 회복할 때 발생하는 운동 행동 변화를 정량적으로 설명하는 데 기여하여 이 격차를 부분적으로 메우는 데 기여했습니다. 그러나 이러한 변화의 기저에 있는 신경 상관 관계는 덜 연구되었습니다. 이것은 몇 가지 이유 때문입니다.
뇌 기능 영상은 시간이 많이 걸리고 때로는 임상시험의 맥락에서 완료하기 어려우며, 환자의 연구 순응 가능성을 극대화하기 위해 환자의 부담을 최소화해야 하는 경우가 많습니다. 뇌졸중 후 피로와 근육 약화가 자주 관찰된다는 사실을 감안할 때 뇌졸중을 앓은 적이 있는 개인에게 특히 해당된다30. 또한 기능적 자기공명영상(fMRI)과 같이 자기장을 기반으로 하는 영상 기법은 환자와 로봇 하드웨어 모두 자석으로부터 안전해야 합니다.
비침습적 이미징 방식 중에서 기능적 근적외선 분광법(fNIRS)은 로봇 치료를 받는 피험자의 뇌 활성화 영역을 평가하는 데 특히 적합한 이미징 기술입니다. fMRI와 유사하게 fNIRS는 뇌의 혈액 산소화/탈산소화를 측정합니다. 그러나 fMRI와 달리 fNIRS는 로봇 하드웨어와 완벽하게 호환되며 종종 휴대가 가능하며 침대 옆에서도 사용할 수 있습니다. 또한, fNIRS는 비용이 저렴하고 모션 아티팩트 31,32,33에 대한 민감도가 낮다.
70년대 후반에 처음 도입된 이래 많은 임상 환경에서 fNIRS의 분명한 장점과 광범위한 사용에도 불구하고34, 하지 운동 및 뇌졸중 운동 회복과 관련된 뇌 활성화를 정량화하기 위해 fNIRS를 사용한 연구는 소수에 불과합니다. 운동의 신경 조절 기전을 규명하거나 뇌졸중으로부터 운동 회복을 평가하기 위한 FNIRS 연구는 주로 단일관절 운동(예: 배측굴곡, 발바닥 굴곡 또는 무릎 신전 운동35,36,37), 걷기38,39,40,41,42,43 또는 사이클링44을 조사하였다. 리뷰는45를 참조하십시오. 마찬가지로, 하지를 위한 로봇 보조 치료에 대한 fNIRS 연구는 대부분 로봇 보조 보행 재활에 중점을 두었습니다. 리뷰는46을 참조하십시오. 몇몇 연구들은 fNIRS를 뇌-컴퓨터 인터페이스(Brain-Computer Interface, BCI) 시스템의 일부로 사용하여 로봇 장치에 대한 제어 신호를 유도하는 데 초점을 맞추었다(47,48); 이 연구 분야는 fNIRS 신호 처리에도 의존하지만, 그 목표는 다르며 주로 환자의 의도(예: 중증 운동 장애 환자)를 해독하는 데 중점을 둡니다.
여기에 제시된 파일럿 연구는 하지 재활을 위한 로봇 시스템의 효과를 조사하기 위한 초기 노력의 일부입니다. 이 로봇은 일상적인 다관절 움직임에 대한 훈련을 포함하는 목표 지향적인 하지 재활을 제공할 수 있을 뿐만 아니라 하지의 단일 관절(예: 무릎 또는 발목)에 대한 치료를 제공할 수 있습니다(즉, 상향식 재활 프로그램 구현).
이 연구는 하지, 다관절 포인팅 운동을 수행하는 동안 fNIRS 데이터 수집이 필요한 실험 프로토콜의 타당성을 조사하는 것을 목표로 했습니다. 6분으로 제한된 이 연구의 데이터 수집 기간은 일반적인 fNIRS 프로토콜보다 짧습니다. 이는 특히 이동성이나 근력이 제한된 환자에서 이 연구의 실용성과 임상적 적용 가능성을 높이기 위한 목적으로 이루어진 신중한 선택이었습니다. 이러한 복잡한 다관절 운동의 fNIRS 상관 관계를 식별하고 로봇 지원에 의해 뇌 활성화가 어떻게 조절되는지에 대한 통찰력을 얻는 것도 관심 지점이었습니다. 이를 위해 동일한 참가자를 대상으로 두 세션의 실험을 수행했는데, 하나는 로봇의 도움을 받지 않았고 다른 하나는 로봇의 도움을 받았습니다. 마지막으로, 본 연구는 로봇 치료가 목표로 하는 움직임 중 뇌 활성화의 평가 및 기록 프로토콜 타당성 측면에서 향후 연구의 토대를 마련하기 위해 건강한 피험자에 초점을 맞췄다는 점에 주목하는 것이 중요합니다.
기구
하지 재활을 제공하도록 설계된 휴대용 로봇( 그림 1 참조)이 실험을 수행하는 데 사용되었습니다. 이 로봇은 3D 접근 가능한 작업 공간을 가지고 있으며 무게가 약 35파운드로 작고 가벼워 운반 및 설치가 쉽습니다.
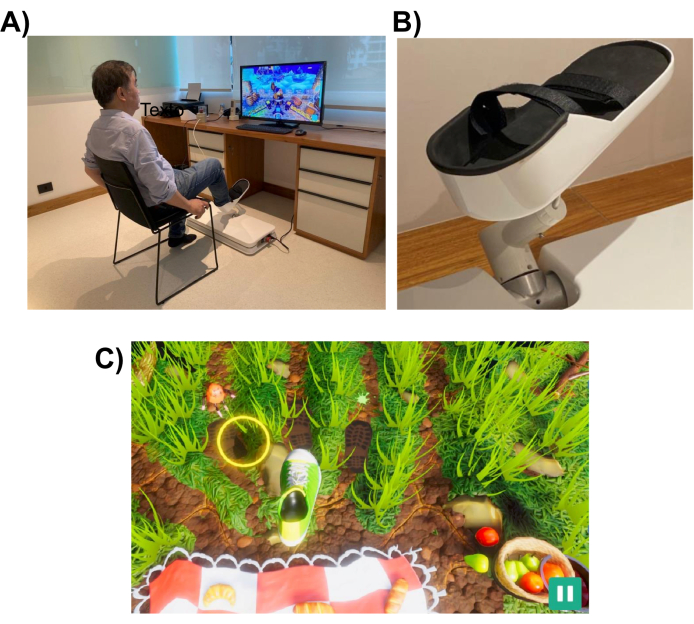
그림 1: 실험 설정. (A) 하지용으로 설계된 로봇 시스템(바닥에 설치됨). 자원봉사자가 오른발로 인터페이스를 활용하는 모습이 보입니다. (B) 로봇 시스템에 부착할 수 있는 피험자의 발을 지지하는 구조. (C) 피크닉 게임의 스크린샷. 게임의 목표는 발(녹색과 흰색 신발)을 목표물(노란색 원)로 이동하는 것입니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
로봇 시스템은 환자가 가리키기나 발차기와 같은 일상 업무에서 수행하는 것과 유사한 하지 움직임을 수행하는 데 도움을 주도록 설계되었습니다. 로봇 장치 앞에 놓인 컴퓨터 모니터 또는 텔레비전 화면에 표시되는 대화형 가상 현실 게임을 사용합니다( 그림 1 참조). 로봇 엔드 이펙터는 환자의 하지(예: 발목)에 부착되고, 그 위치는 화면 상의 커서 위치에 매핑됩니다. 일반적인 게임은 환자의 움직임 목표(예: 가리킬 물체 또는 공을 찰 위치)를 보여줍니다.
이동 작업을 완료하기 위해 로봇은 완전한 지원에서 전혀 지원하지 않는 수준까지 다양한 수준의 지원으로 환자를 도울 수 있습니다. 로봇 지원 수준은 환자의 운동 장애 수준에 따라 각 재활 세션이 시작될 때 선택됩니다. 피험자가 수행한 움직임은 게임에서 환자의 수행 능력에 점수를 매기고 수행에 대한 피드백(예: ROM, 움직임 횟수 및 로봇 지원 수준)을 제공하는 데 사용됩니다. 게임은 환자의 관심과 관심을 유지하기 위해 상호 작용하고 재미있게 설계되었습니다. 이 연구에서 참가자들은 “피크닉 게임”을 했는데, 플레이어는 곤충이 수건에 손을 뻗어 음식을 훔치는 것을 막아야 했습니다(스크린샷은 그림 1, 하단 패널 참조).
데이터 수집은 2개의 서로 다른 연속파 옵토드(760nm 및 850nm), 8개의 듀얼 팁 LED 소스 및 8개의 듀얼 팁 활성 검출기가 있는 휴대용 fNIRS 수집 시스템으로 수행되었습니다. 신호는 10.17Hz의 샘플링 속도를 사용하여 수집되었습니다. fNIRS 시스템에서 생성된 Wi-Fi 네트워크를 사용하여 교정 최적화 및 신호 기록에 노트북을 사용했습니다.
캡은 미리 결정된 위치에 옵토드를 고정하는 데 사용되었습니다. 소스와 검출기는 10-10 국제 EEG 시스템에 따라 격자 공간 분포에 배치되었습니다. 각 fNIRS 채널은 약 30mm의 옵토드 간 거리를 갖는 소스-검출기 쌍에 의해 정의되었습니다. 옵토드는 그림 2에 표시된 위치의 보조 모터, 프리모터 및 모터 영역 위에 배치되었습니다. 총 채널 수는 28개였으며, 여기서 8개는 광섬유 어댑터를 사용하여 단일 검출기에 각 소스에 연결된 단거리 채널이었습니다. 하드웨어의 멀티플렉싱 설정을 감안할 때 하나의 검출기만 사용하여 모든 소스에서 근거리 정보를 수집할 수 있습니다.
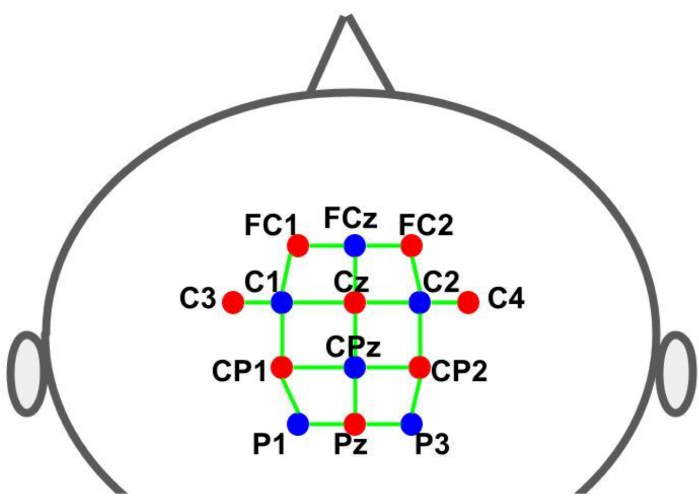
그림 2: 10-10 EEG 시스템을 사용한 몽타주 레이아웃. 문자와 숫자는 소스/감지기 위치를 나타냅니다. 빨간색과 파란색 점은 각각 소스 및 검출기 옵토드를 나타냅니다. 녹색 선은 소스 쌍과 검출기 쌍으로 구성된 fNIRS 채널을 나타냅니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
실험 설계
실험은 피험자의 움직임에 대해 로봇이 제공하는 지원 수준이 다른 두 가지 뚜렷한 실험 조건에서 수행되었습니다. 첫 번째 조건에서 로봇은 피험자의 움직임에 어떤 도움도 주지 않도록 프로그래밍된 반면, 두 번째 조건에서는 로봇이 피험자의 발과 다리 움직임을 제어했다(로봇 보조 움직임).
각 실험은 그림 3과 같이 운동 작업(게임 플레이 – 30초)과 휴식(30초)의 교대 주기를 포함하는 블록 설계 패러다임을 따랐습니다. 각 단계(플레이/게임 또는 휴식)의 시작과 종료는 컴퓨터 화면을 통해 피험자에게 시각적으로 신호를 보냈다. 휴식 단계에서 일시 중지를 나타내는 메시지가 표시되었습니다. 각 주기(플레이/게임 + 휴식)의 지속 시간은 60초이고 6번 반복되어 총 실행 시간은 360초(6분)입니다.
참가자들은 곤충이 수건에 닿아 음식을 훔치는 것을 막는 것이 목표인 “피크닉 게임”을 했습니다. 이 게임은 지정된 홈 타겟(초기 위치)에서 시작하여 홈 타겟으로 돌아오기 전에 세 개의 바깥쪽 타겟 중 하나를 향해 뻗는 일련의 하지 움직임을 포함했습니다. 화면에서 바깥쪽 표적은 움직이는 움직이는 곤충으로 시각적으로 표현되었으며, 참가자들은 이 곤충에 손을 뻗어 밟아야 했습니다. 바깥쪽에 도달하는 표적은 3개였으며, 각 표적은 무작위로 동일한 횟수로 제시되었으며, 모든 움직임에 대해 공통된 홈 표적이 있었습니다. 발이 홈 타겟에서 외부 타겟의 위치까지 이동하는 데 필요한 거리는 약 26cm의 호를 형성합니다. 운동 작업은 다관절 운동의 실행이 필요했기 때문에 무릎 굴곡/신전, 발바닥 굴곡 및 배측 굴곡 운동 간의 조정이 필요했습니다.
fNIRS 데이터 기록은 로봇에 의해 생성된 TTL(Transistor-Transistor-Logic) 펄스를 통해 게임이 피험자에게 제공하는 시각적 자극과 동기화되었습니다. 펄스는 각 단계(플레이/게임 및 휴식)의 시작 시 생성되었습니다. 따라서 모든 타이밍 제어는 게임에 의해 수행되었으며, 이는 참가자에게 각 동작을 시작하도록 시각적 단서(대상)를 제공하고, 뇌 활동 기록을 표시하기 위해 fNIRS 시스템에 TTL 신호를 보내고, 실험에 필요한 경우 로봇 제어 시스템에 신호를 보내 움직임 지원을 시작합니다.
