Los datos epidemiológicos indican que en todo el mundo hay ~17 millones de nuevos casos de accidente cerebrovascular cada año, con un aumento de la incidencia en los países de ingresos bajos y medianos1. Se estima que el número de nuevos casos aumentará a 77 millones en 20302. El deterioro motor debido a un accidente cerebrovascular a menudo afecta la movilidad del paciente y su participación en las actividades de la vida diaria, lo que contribuye a una baja calidad de vida. La rehabilitación motora tradicional incluye la terapia manual, pero en las últimas décadas se han desarrollado sistemas robóticos para la rehabilitación. Estos sistemas pueden administrar terapia a alta intensidad, dosis, cuantificabilidad, fiabilidad, repetibilidad y flexibilidad3 y han demostrado su potencial como tratamientos de rehabilitación eficaces para pacientes con ictus agudo y crónico 4,5,6. Además de administrar la terapia, los sistemas robóticos para la rehabilitación pueden utilizarse como herramientas de evaluación, ya que pueden equiparse con sensores que pueden medir los datos cinemáticos/cinéticos del movimiento del paciente 7,8. Para la rehabilitación motora de las extremidades superiores, estos datos no solo han demostrado ser útiles para evaluar el nivel de recuperación motora del paciente provocado por la terapia robótica y han servido como herramienta complementaria a las evaluaciones clínicas tradicionales 9,10, sino que también han contribuido a avanzar en la comprensión del proceso de recuperación motora del ictus11. 12 así como el control neural del movimiento y el aprendizaje motor en sujetos sanos 3,13,14. Como resultado, estos hallazgos han proporcionado una base para mejorar los tratamientos de rehabilitación15.
En las últimas dos décadas, se han propuesto muchos dispositivos robóticos para la neurorrehabilitación de las extremidades inferiores, que van desde exoesqueletos que soportan el peso corporal del paciente durante la marcha (por ejemplo, sobre una cinta de correr, como Lokomat16) hasta sistemas robóticos estacionarios que permiten al paciente ejercitar el tobillo, la rodilla o el pie sin caminar (como el Rutgers Ankle17, el Robot de Rehabilitación de Tobillo de Alto Rendimiento18, y el Robot de Rehabilitación de Tobillo/Pie del Instituto de Ciencia y Tecnología de Gwangju (GIST)19) u órtesis activas de pie que son exoesqueletos accionados que lleva el paciente para caminar sobre el suelo o sobre una cinta de correr (como la Órtesis de Marcha Motorizada20 y el Anklebot21 del MIT). Véase 22,23,4 para una revisión sobre los robots para la rehabilitación de las extremidades inferiores.
Los resultados de los estudios clínicos de dispositivos robóticos para la rehabilitación de miembros inferiores en pacientes con accidente cerebrovascular han sido alentadores y han demostrado que estos sistemas pueden mejorar el rango de movimiento (ROM) de las articulaciones, la fuerza muscular o la marcha, según el dispositivo específico y el protocolo clínico (ver 24,25 para una revisión sobre la eficacia de los robots de extremidades inferiores para la rehabilitación). Si bien se ha postulado que la terapia asistida por robot promueve cambios neuroplásticos, que en última instancia resultan en una mejora de las habilidades motoras26, cómo ocurre exactamente el proceso de recuperación motora de un accidente cerebrovascular y qué protocolos de entrenamiento robótico optimizan el proceso de recuperación de las habilidades motoras de las extremidades inferiores, siguen siendo en su mayoría poco claras. De hecho, existe una disparidad significativa y creciente entre el creciente desarrollo de robots de rehabilitación (ya sea por parte de investigadores académicos o entidades comerciales) y la limitada comprensión de los mecanismos neurofisiológicos que subyacen a la recuperación motora4. Las mediciones de la cinemática del movimiento o de los torques articulares tomadas con sensores integrados han contribuido a describir cuantitativamente los cambios en el comportamiento motor que ocurren a medida que los pacientes recuperan las habilidades motoras de las extremidades inferiores 27,28,29, llenando parcialmente este vacío. Sin embargo, los correlatos neuronales que subyacen a tales cambios han sido menos investigados. Esto se debe a varias razones.
Las imágenes funcionales del cerebro requieren mucho tiempo y, a veces, son difíciles de completar en el contexto de los ensayos clínicos, que a menudo requieren mantener la carga del paciente al mínimo para maximizar la probabilidad de que el paciente se adhiera al estudio. Esto es particularmente cierto para las personas que han sufrido un accidente cerebrovascular, dado el hecho de que la fatiga y la debilidad muscular posteriores al accidente cerebrovascular se observan con frecuencia30. Además, las modalidades de imágenes que se basan en campos magnéticos, como la resonancia magnética funcional (fMRI), requieren que tanto el paciente como el hardware robótico sean seguros para los imanes.
Entre las modalidades de imagen no invasivas, la espectroscopia funcional de infrarrojo cercano (fNIRS) es una técnica de imagen especialmente adecuada para evaluar áreas de activación cerebral en sujetos sometidos a terapia robótica. De manera similar a la resonancia magnética funcional, la fNIRS mide la oxigenación/desoxigenación de la sangre en el cerebro. Sin embargo, a diferencia de la resonancia magnética funcional, la fNIRS es totalmente compatible con el hardware robótico y, a menudo, es portátil, incluso se puede utilizar junto a la cama. Además, fNIRS tiene bajo costo y menos sensibilidad a los artefactos de movimiento 31,32,33.
A pesar de sus claras ventajas y su uso generalizado en muchos entornos clínicos desde su primera introducción a finales de los años 7034, solo unos pocos estudios han utilizado fNIRS para cuantificar la activación cerebral asociada con los movimientos de las extremidades inferiores y la recuperación motora del ictus. Los estudios FNIRS dirigidos a dilucidar los mecanismos de control neural del movimiento y/o los mecanismos o la evaluación de la recuperación motora del accidente cerebrovascular han investigado principalmente los movimientos de una sola articulación (p. ej., movimientos de dorsiflexión, flexión plantar o extensión de rodilla 35,36,37), caminar 38,39,40,41,42,43 o andar en bicicleta44. Véase45 para una revisión. Del mismo modo, los estudios de fNIRS sobre la terapia asistida por robot para las extremidades inferiores se han centrado principalmente en la rehabilitación de la marcha asistida por robot; Véase46 para una revisión. Algunos estudios se han centrado en el uso de fNIRS como parte de un sistema de interfaz cerebro-computadora (BCI) para derivar señales de control para dispositivos robóticos47,48; Si bien esta área de investigación también se basa en el procesamiento de señales fNIRS, su objetivo es diferente y se centra principalmente en decodificar las intenciones de los pacientes (por ejemplo, pacientes con discapacidades motoras graves).
El estudio piloto presentado en este documento es parte de un esfuerzo inicial para investigar los efectos de un sistema robótico para la rehabilitación de extremidades inferiores. El robot puede ofrecer rehabilitación de extremidades inferiores orientada a objetivos que implica entrenamiento en movimientos multiarticulares cotidianos, así como administrar terapia a articulaciones individuales (por ejemplo, rodilla o tobillo) de la extremidad inferior (es decir, implementar un programa de rehabilitación de abajo hacia arriba).
El estudio tuvo como objetivo investigar la viabilidad de un protocolo experimental que requiriera la adquisición de datos fNIRS durante la realización de movimientos de apuntamiento multiarticular de miembros inferiores. La duración del período de adquisición de datos en este estudio, que se limitó a 6 min, es más corta que la de los protocolos fNIRS típicos. Esta fue una elección deliberada con el objetivo de mejorar la practicidad y la aplicabilidad clínica de esta investigación, particularmente en pacientes con movilidad o fuerza limitadas. La identificación de los correlatos fNIRS de movimientos multiarticulares tan complejos y la obtención de información sobre cómo la activación cerebral fue modulada por la asistencia de robots también fueron puntos de interés. Para ello, se llevaron a cabo dos sesiones de experimentos con los mismos participantes: una sin asistencia robótica y otra con asistencia robótica. Por último, es importante destacar que este estudio se centró en sujetos sanos con el fin de establecer una base para futuras investigaciones en cuanto a la viabilidad del protocolo de registro y la evaluación de la activación cerebral durante los movimientos dirigidos a la terapia robótica.
Aparato
Para llevar a cabo nuestros experimentos se utilizó un robot portátil diseñado para llevar a cabo la rehabilitación de las extremidades inferiores (véase la Figura 1). El robot tiene un espacio de trabajo accesible en 3D y es compacto y liviano, pesa alrededor de 35 libras, lo que facilita su transporte e instalación.
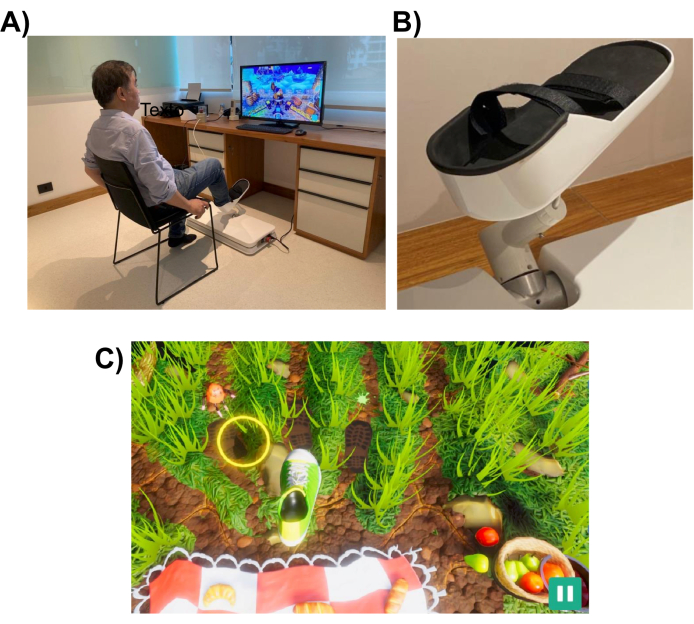
Figura 1: Configuración experimental. (A) El sistema robótico (instalado en el suelo) diseñado para la extremidad inferior. Se muestra a un voluntario utilizando la interfaz con su pie derecho. (B) Estructura de soporte para el pie del sujeto que permite la fijación al sistema robótico. (C) Una captura de pantalla del juego Picnic. El objetivo del juego es mover el pie (zapato verde y blanco) hasta el objetivo (círculo amarillo). Haga clic aquí para ver una versión más grande de esta figura.
El sistema robótico está diseñado para ayudar al paciente a realizar movimientos de las extremidades inferiores similares a los que se realizan en las tareas cotidianas, como señalar o patear. Utiliza juegos interactivos de realidad virtual, que se muestran en un monitor de computadora o en una pantalla de televisión colocada frente al dispositivo robótico (ver Figura 1). El efector del extremo del robot está conectado a la extremidad inferior del paciente (por ejemplo, el tobillo) y su posición se asigna a la posición de un cursor en la pantalla. Un juego típico muestra los objetivos de movimiento del paciente (por ejemplo, el objeto al que apuntar o dónde patear la pelota).
Para completar la tarea de movimiento, el robot puede ayudar al paciente con un nivel de asistencia que puede variar desde asistencia completa hasta ninguna. El nivel de asistencia robótica se elige al comienzo de cada sesión de rehabilitación en función del nivel de discapacidad motora del paciente. Los movimientos realizados por el sujeto son utilizados por el juego para puntuar el rendimiento del paciente y proporcionarle información sobre su rendimiento (por ejemplo, ROM, número de movimientos y nivel de asistencia robótica). Los juegos están diseñados para ser interactivos y entretenidos para mantener el interés y la atención del paciente. En este estudio, los participantes jugaron el “juego de picnic”, en el que el jugador tenía que evitar que los insectos alcanzaran la toalla y robaran la comida (consulte la Figura 1, panel inferior, para obtener una captura de pantalla).
La adquisición de datos se realizó con un sistema de adquisición fNIRS portátil con dos optodos de onda continua diferentes (760 nm y 850 nm), 8 fuentes LED de doble punta y 8 detectores activos de doble punta. Las señales se adquirieron utilizando una frecuencia de muestreo de 10,17 Hz. Se utilizó un ordenador portátil para la calibración, la optimización y el registro de la señal mediante una red Wi-Fi creada por el sistema fNIRS.
Se utilizó una tapa para mantener los optodes en los lugares predeterminados. Las fuentes y los detectores se colocaron de acuerdo con el sistema EEG internacional 10-10 en una distribución espacial de cuadrícula. Cada canal fNIRS se definió mediante un par fuente-detector con distancias entre optótodos de aproximadamente 30 mm. Los optodos se colocaron sobre las áreas suplementarias del motor, el premotor y el motor en las ubicaciones que se muestran en la Figura 2. El número total de canales fue de 28, donde 8 eran canales de corta distancia que se acoplaron a cada fuente mediante un adaptador de fibra óptica a un solo detector. Dada la configuración de multiplexación del hardware, es posible adquirir información a corta distancia de todas las fuentes utilizando un solo detector.
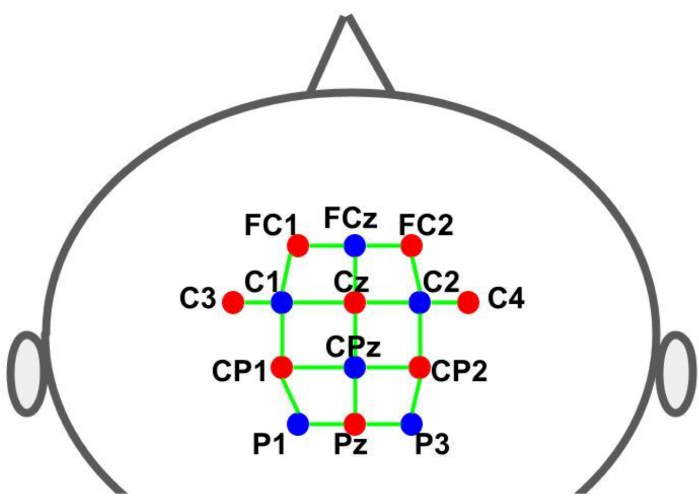
Figura 2: Diseño del montaje utilizando el sistema de EEG 10-10. Las letras y los números indican la ubicación de la fuente/detector. Los puntos rojos y azules representan los optodos de origen y detector, respectivamente. Las líneas verdes representan los canales fNIRS que constan de pares de fuente y detector. Haga clic aquí para ver una versión más grande de esta figura.
Diseño experimental
El experimento se llevó a cabo en dos condiciones experimentales distintas, que difieren en el nivel de asistencia proporcionado por el robot para los movimientos del sujeto. En la primera condición, el robot fue programado para no proporcionar ninguna ayuda a los movimientos del sujeto, mientras que en la segunda condición, el robot controló los movimientos de los pies y las piernas del sujeto (movimiento asistido por robot).
Cada experimento siguió un paradigma de diseño de bloques que involucraba ciclos alternos de una tarea motora (jugar el juego – 30 s) y descansar (30 s), como se ilustra en la Figura 3. El inicio y la conclusión de cada fase (juego/juego o descanso) se señalizaban visualmente al sujeto a través de la pantalla del ordenador. Durante la fase de descanso, se mostraba un mensaje que indicaba una pausa. Cada ciclo (juego/juego + descanso) tuvo una duración de 60 s y se repitió seis veces, lo que resultó en un tiempo de ejecución total de 360 s (6 min).
Los participantes jugaron al “Juego de picnic”, en el que el objetivo era evitar que los insectos llegaran a la toalla y robaran la comida. Este juego consistía en una secuencia de movimientos de las extremidades inferiores, comenzando desde un objetivo local designado (posición inicial) y extendiéndose hacia uno de los tres objetivos exteriores antes de regresar al objetivo local. En la pantalla, los objetivos exteriores se representaban visualmente como insectos animados en movimiento, a los que los participantes tenían que llegar y pisar. Había tres objetivos de alcance exterior, cada uno presentado aleatoriamente un número igual de veces, junto con un objetivo de inicio común para cada movimiento. La distancia que el pie debía recorrer desde el objetivo local hasta la posición de los objetivos exteriores formaba un arco, que medía aproximadamente 26 cm. La tarea motora requirió la ejecución de movimientos multiarticulares, exigiendo coordinación entre los movimientos de flexión/extensión de rodilla, flexión plantar y dorsiflexión.
Las grabaciones de datos de fNIRS se sincronizaron con los estímulos visuales presentados por el juego al sujeto a través de un pulso transistor-transistor-lógico (TTL) generado por el robot. Los pulsos se generaron al inicio de cada fase (juego/juego y descanso). Por lo tanto, todo el control de tiempo fue realizado por el juego, que proporcionó señales visuales (objetivos) al participante para iniciar cada movimiento, envió señales TTL al sistema fNIRS para marcar los registros de actividad cerebral y, si el experimento lo requería, envió señales al sistema de control del robot para iniciar la asistencia de movimiento.
