


Introduction
Avec la montée de l' obésité mondiale au cours de la dernière partie du 20 e siècle, il y a un regain d' attention sur les mécanismes sous - jacents d' alimentation 1, 2, 3, 4. En règle générale, l' apport alimentaire est pesé manuellement 5, ou avec des systèmes d' alimentation disponibles dans le commerce. Les systèmes commerciaux sont excellents, mais offrent une flexibilité limitée à modifier leurs conceptions ou code. Ici, nous décrivons le dispositif d' alimentation de Expérimentation (FED): un système d'alimentation open-source pour la mesure de la prise alimentaire avec une résolution temporelle fine et une interférence humaine minimale 6. FED est alimenté par batterie et entièrement contenu dans un dossier imprimé 3D qui peut adapter à l'intérieur de la cage de porte-colonie standard ou tout autre équipement scientifique.
Dans son état d'équilibre, FED fonctionne dans un mode de faible puissance avec une pastille de repos de la nourriture dans son food bien. La présence de la pastille est surveillée au moyen d'un faisceau infrarouge. Lorsqu'une souris enlève une pastille, un capteur de Photointerrupter envoie un signal au microcontrôleur et l'horodatage est enregistré sur la carte embarquée Secure Digital (SD). En parallèle, un transistor à transistor logique (TTL) de sortie fournit un signal de sortie en temps réel de la récupération des granulés. Immédiatement après cet événement, le moteur tourne pour distribuer une autre pastille, et le système revient à son mode de faible puissance. En raison de sa nature open-source, FED peut être modifié et amélioré pour répondre aux besoins spécifiques de recherche. Par exemple, le code peut être facilement modifié pour limiter l'alimentation à des moments précis de la journée, ou pour arrêter la distribution quand un certain nombre de pastilles a été atteint, sans nécessiter l'intervention humaine.
Ici, nous décrivons les instructions étape par étape pour la construction, la validation et l'utilisation des FED pour mesurer la prise alimentaire chez la souris. Nous fournissons une liste de tous les composants pour construire un système. Surtout, pas ex avantpérience dans l'électronique est nécessaire pour construire FED.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
NOTE: Ce protocole est écrit pour les composants spécifiquement nommés dans la Table des Matières. Bien que la fonctionnalité similaire peut être obtenu en utilisant un autre matériel, FED a été programmé pour le Pro microcontrôleur Arduino (désormais appelé: microcontrôleur) et accessoires listés. D'autres microcontrôleurs peuvent fonctionner aussi bien, mais il faudra à l'utilisateur de modifier le code pour les soutenir. l'analyse des données hors ligne a été codée en utilisant le langage de programmation Python.
1. Préparation et installation du logiciel
- Procure composants électroniques nécessaires à la construction FED (voir le tableau 1 andFed Github BoM.xlxs à: https://github.com/KravitzLab/FED/tree/master/doc).
REMARQUE: Les fournisseurs alternatifs peuvent être utilisés pour de nombreuses parties sur cette table, à condition qu'ils aient des spécifications équivalentes. - Imprimer tous les composants 3D conçus (Figure 1, disponible à: https://github.com/KravitzLab/FED/wiki/3D-Printed-Components). imprimantes 3D avec un micron 200la résolution devrait être capable d'imprimer FED.
- Télécharger et installer la plate-forme environnement de développement intégré (IDE) pour programmer le microcontrôleur.
- Télécharger et installer des bibliothèques supplémentaires pour activer la fonctionnalité de protection du moteur et enregistreur de données (disponible à l'adresse: https://github.com/KravitzLab/fed/tree/master/fed-arduino).
- Procure outils nécessaires pour l' assemblage (par exemple un fer à souder, pistolet thermique, soudure, pince à dénuder, pinces à bec effilé, et les deux à tête plate et tournevis).
2. Composants électriques à souder
REMARQUE: Utiliser un tube thermorétractable pour protéger tous les joints soudés. Avant les connexions à souder, faites glisser un morceau de tube de film rétractable (~ 2 cm) autour des tubes l'un des fils. Après avoir soudé la connexion, centrer le tuyau sur le point de connexion et utiliser un pistolet à chaleur pour chauffer rétrécir le tube.
- Connecteurs Préparation (figure 2A)
- Préparer quatre paires de connecteurs JST à 2 broches etmarquer à la fois mâle et femelle côtés "A", "B", "C" et "D", respectivement. Retirez le fil rouge des deux côtés du connecteur paire "D".
- Préparer une JST paire de connecteurs 3 broches et étiqueter la fois mâle et femelle côtés "E".
- Microcontroller et empilables boucliers (figure 2B)
- Soudez embases empilables femelles avec des prises sur le côté supérieur du microcontrôleur. Couper le fil en saillie à partir des en-têtes sur le fond du micro-contrôleur.
- Solder femelle en-têtes empilables avec des prises sur la face supérieure de l'écran d'enregistrement de données SD. Laisser en saillie fils en bas de l'écran.
- Souder les connecteurs mâles sur le flasque du moteur avec des broches faisant saillie à partir du fond.
- Placer une pile de pièces de monnaie dans la fente du bouclier SD pour alimenter le module d'horloge temps réel.
- Bouton externe de puissance (figure 2C)
NOTE: Un verrouillage métallique touche has cinq connexions: puissance, sol, normalement fermé (NC1), normalement ouvert (NO1) et commun (C1).- Soudez le connecteur 2 broches mâle "A" à C1 (utilisation fil rouge) et la terre (utiliser du fil noir). Thermorétractable toutes les connexions.
- Soudez le 2 broches connecteur mâle "B" à + (utilisation de fil rouge) et NO1 (utiliser du fil noir). Thermorétractable toutes les connexions.
- Photointerrupter (figure 2D)
- Solder photoélectrique (la partie noire) au dévissage bord.
- Soudez une résistance 4.7K à l'avant de la carte d'évasion.
- Soudez le mâle 3 broches connecteur "E" à l'arrière de la carte d'évasion: fil rouge à PWR, fil vert à GND, et le fil blanc à SGL.
- Coupez les fils lâches à l'arrière de Photointerrupter éclater bord.
- Carte Boost (Figure 2F)
- Soudez le 2 broches connecteur femelle "A" à 5V et au sol broches de la carte de boost.
- Soudez le fil noir de maconnecteur le "D" à la broche GND supplémentaire sur la carte de boost.
- Câble de sortie BNC ( en option: Figure 2F)
- Soudez le 2 broches connecteur "C" aux bornes d'un câble BNC (fil rouge à la broche centrale, le fil noir à la broche à l'extérieur).
NOTE: Pour le montage, le connecteur 2 broches doit passer à travers l'écrou sur le connecteur BNC. Nous utilisons un connecteur plus petit, ou raser sur le connecteur JST avec une lame de rasoir pour le faire rentrer.
- Soudez le 2 broches connecteur "C" aux bornes d'un câble BNC (fil rouge à la broche centrale, le fil noir à la broche à l'extérieur).
- Bouclier moteur (Figure 2G)
- Tordre les fils rouge et noir du connecteur femelle "B" ensemble et soudure à V en.
- Soudez le fil noir du connecteur femelle "C" à la broche de terre à côté de ARef, et le fil rouge de ce connecteur à la broche 3.
- Soudez le fil noir du connecteur femelle "D" à la broche de terre à côté de V.
- Soudez le fil vert du connecteur femelle "E" à la broche de terreà côté de 5V, le fil rouge de ce connecteur à 5V, et le fil blanc de ce connecteur à la broche 2.
3. Logiciel Upload
- Connectez la carte d'évasion FTDI aux broches de programmation du microcontrôleur, puis connectez FTDI carte opto à l'ordinateur via un câble USB micro.
- Ouvrez le programme IDE (environnement de développement intégré).
- Sélectionnez la carte microcontrôleur correcte pour le téléchargement de logiciel via Outils> menu déroulant Conseil.
- Sélectionnez ATMega 328 (5V, 16MHz) par l'intermédiaire du menu Outils> Processeur.
- Sélectionnez le port que le microcontrôleur est connecté à l'aide d'outils> Port> COM # (varie selon le port est actuellement en cours d'utilisation).
- Cliquez sur le bouton "télécharger" pour télécharger le croquis FED à la carte (disponible à l'adresse: https://github.com/KravitzLab/fed/tree/master/fed-arduino).
4. Hardware Assemblée
- Moteur Stepper et mOtor bouclier (Figures 1C et 3A et 3B)
- Fixer le moteur pas à pas sur le 5V 3D imprimé support moteur avec deux n ° 6 x ¼ "vis de tôlerie (figures 1C et 3A).
- Insérez le disque en rotation dans le moteur monter et pousser vers le bas pour attacher solidement à l' arbre de moteur pas à pas (figure 3B).
- Twist sur les aliments imprimés 3D silo sur le support moteur assurant que le bras pellet niveleur est sur le trou dans le support du moteur.
- Twist sur des morceaux connectés en haut (étapes 4.1.1 - 4.1.3) au sommet de la base imprimée, avec le moteur pas à pas positionnée vers l'arrière de la base et le trou positionné à l'avant.
- Coupez le connecteur à 5 broches des fils du moteur pas à pas et la bande ~ 2 mm de l'extrémité de chaque fil.
- Connecter les fils de moteur pas à pas les borniers sur le bouclier du moteur: rouge à la terre, orange et rose à un port du moteur (par exemple, M1), et bleu et jaune à l'autre mOtor le port (par exemple, M2).
- Bouton externe de puissance
- Retirer l'écrou du bouton d'alimentation et insérez le bouton d'alimentation dans le trou dans le côté droit de la base. bouton sécurisé en place avec l'écrou hexagonal.
- Photointerrupter (figure 3C)
- Placez le Photointerrupter dans son logement imprimé 3D.
REMARQUE: utiliser un pistolet thermique pour chauffer le logement si le Photointerrupter ne repose pas tout le chemin dans. - Chaîne 3 broches connecteur mâle "E" de la photo-interrupteur (PWR, GND, et SGL) à travers le trou du milieu avant de la base imprimée 3D.
- Fixer le boîtier dans la base FED avec deux vis 1 "en nylon et des écrous correspondants.
- Placez le Photointerrupter dans son logement imprimé 3D.
- Câble de sortie BNC ( en option)
- Insérez le connecteur BNC dans le trou sur le côté gauche de la base FED. Fixez en place avec l'écrou.
- Si le connecteur BNC est pas utilisé, boucher le trou avec prise 3D imprimée.
- Batterie et planche de boost (Figure 3D)
- Branchez 3,7 V batterie au module de convertisseur élévateur continu / continu via la connexion JST à 2 broches. La LED bleue sur la carte Boost s'allume si la batterie est chargée.
- Conseils de montage à l' intérieur du boîtier (Figure 3E)
- Mont microcontrôleur à l'intérieur de la base avec des connexions FTDI face à l'interrupteur d'alimentation, en utilisant # 4 x ¼ "vis à tôle en acier.
- Empilez bouclier moteur et l'enregistrement de données bouclier sur le dessus du microcontroleur.
- Vissez la carte Boost dans le cas en utilisant # 2 x ¼ "vis à tôle en acier. Mont Boost avec la fente micro-SD vers le bas. FED peut être chargé par ce port sans ouvrir le boîtier.
- Connecter les cinq connecteurs, "A" mâle "A" "B" femelle, mâle à femelle "B", etc.
- Placez la batterie à l'intérieur de la base imprimée en 3D et à proximité en faisant glisser le couvercle arrière. Faites glisser sur la plaque frontale 3D imprimée.
5. Validation et acquisition de données
NOTE: Avant la mise sous tension d'un système FED, d'assurer une carte SD est insérée sur le bouclier de SD, sinon FED ne distribue pas de pastilles. En outre, d'assurer une alimentation cavalier sur le blindage du moteur (juste au-dessus du bloc d'alimentation) est en place.
- Puissance sur le système FED avec le bouton d'alimentation et le dispositif de test de fonctionnalité.
- Remplir le silo alimentaire avec 20 boulettes de nourriture mg avant d'allumer.
NOTE: L'interrupteur d'alimentation doit s'allumer, de même que les LED sur le microcontrôleur, SD bouclier, et le bouclier du moteur. S'il n'y a pas le culot dans le puits, on doit dispenser. - Supprimez manuellement 5 - 10 pastilles de la nourriture bien et confirmer que le remplacement des granulés sont distribués.
- Remplir le silo alimentaire avec 20 boulettes de nourriture mg avant d'allumer.
- Retirez la carte SD et vérifier que les données ont été correctement connecté. Les données doivent être acquises dans une valeur séparées par des virgules (.csv) qui est nommé conformément à la vaFILENAME riable dans le code.
- Placez l'unité à l'intérieur FED cadre expérimental, la mise sous tension, et veiller à ce qu'une pastille est distribuée dans la nourriture bien.
- Au cours de l'acquisition de données, vérifier FED quotidiennement pour vérifier qu'il fonctionne correctement en confirmant que la lumière LED sur le commutateur d'alimentation est allumé (ce qui indique que la batterie est suffisamment chargée) et une pastille est assis dans la nourriture bien (indique qu'il n'y a pas de problèmes avec granulés de distribution).
- Après l'acquisition de données, récupérer la carte SD et l'accès aux fichiers .csv.
REMARQUE: les scripts d'analyse pour les repas et les modes d'alimentation sont disponibles sur: https://github.com/KravitzLab/fed.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
Des tests de validation impliquant l'utilisation d'animaux ont été examinés et approuvés par le Comité des soins et l'utilisation des animaux à l'Institut national du diabète et des maladies digestives et rénales. Pour démontrer l'utilisation du FED pour la mesure de cage d' alimentation, femelle adulte C57BL / 6 (n = 4) ont été logés individuellement avec accès ad libitum à l' eau et nourriture de laboratoire standard sous un cycle 12/12 h lumière / obscurité (allume au 5h00). Après une période d'habituation d'une semaine, la trémie de nourriture a été retirée et remplacée par une FED pendant cinq jours d'essais de validation. A la fin de la période d'essai, CÉF ont été retirés des cages et des données d'alimentation de chaque carte SD a été analysé à l'aide personnalisée, les scripts disponibles gratuitement et un programme de feuille de calcul. Comme le montre la figure 4A, la récupération des granulés pour les souris individuelles (panneau supérieur; rasters indiquent des événements unique de granulés de récupération) et la récupération des granulés moyenne dans toutes les souris dans 30 bacs min (bopanneau TTOM; indique la ligne moyenne ± SEM) montrent une alimentation en continu pendant toute la période d'essai de validation, avec la rythmicité circadienne clairement visualisée. Pour quantifier la précision de la capacité d'enregistrement des données de FED, chaque système FED a été donné 1000 pastilles pour la période de test de validation et les pastilles restantes ont été comptées et comparées aux données enregistrées sur la carte SD manuellement. FED enregistré 95,35 ± 1,25% de granulés qui ont été distribués à la carte SD (figure 4B).

Figure 1: 3D Conçu FED Composants. (A) Les mesures de assemblé FED. (B) Vue éclatée des composants 3D imprimés dans un CEF assemblé. (C) Vue éclatée complète ensemble pastille de trémie ( à gauche), l' assemblage du moteur pas à pas sur le disque (au milieu) en rotation, et l' assemblage de silo alimentaire à disque rotatif (rroite). (D) Conception de la nourriture et les bras pour fixer le Photointerrupter pour la détection de granulés. (E) Photographie de complètement assemblé FED. S'il vous plaît cliquer ici pour voir une version plus grande de cette figure.

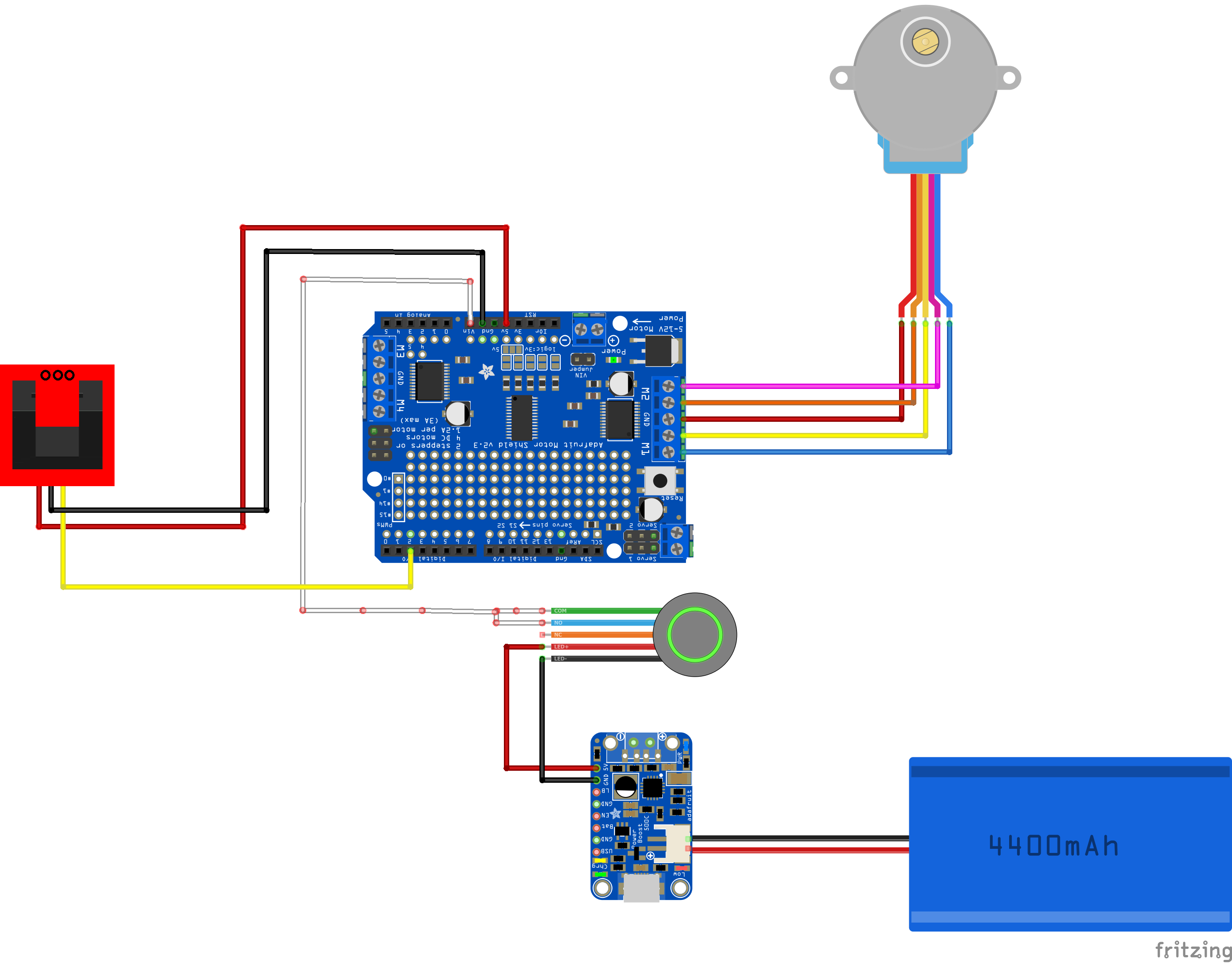
Figure 2: Câblage du FED Composants électriques. Câblage et de (A) Connecteurs (B) Microcontroller, l' enregistrement des données / SD bouclier, bouclier moteur, (C) bouton d'alimentation, (D) Photointerrupter, (E) carte Boost, câble de sortie (F) BNC, (G) Câblage du bouclier du moteur. S'il vous plaît cliquer ici pour voir une version plus grandecette figure.

Figure 3: Assemblée des FED Hardware. (A) de montage moteur pas à pas ( à gauche) dans le support moteur et la fixation de pastille disque ( à droite). (B) moteur pas à pas de câblage à blindage du moteur. (C) Insertion photoélectrique en 3D imprimé logement. (D) Fixation de la batterie à bord Boost. (E) Boards assemblés dans le logement FED. S'il vous plaît cliquer ici pour voir une version plus grande de cette figure.

Figure 4: Représentant des données sur la consommation alimentaire recueillies via FED. Les données (A) sur l' apport alimentaire collectées via FED et visualisées en utilisant open-source des scripts d'analyse. Panneau supérieur: rasters individuels indiquent des événements uniques de récupération des pastilles, avec des rangées contenant des souris individuelles. Panneau inférieur: ligne indique moyenne ± SEM de la prise alimentaire pour les souris (n = 4). (B) La précision des unités FED individuels dans l' exploitation forestière distribué des pastilles. Les couleurs correspondent avec rasters à la figure 3A. S'il vous plaît cliquer ici pour voir une version plus grande de cette figure.

Figure 5: Utilisations modifiées pour FED. (A) monté Extérieurement FED réduit l' espace au sol dans des cages de rongeurs. (B) Modification de la configuration de face avant permet l'ajout de deux ports nez poke pour la formation opérante.ve.com/files/ftp_upload/55098/55098fig5large.jpg "target =" _ blank "> S'il vous plaît cliquer ici pour voir une version plus grande de cette figure.
Fichier supplémentaire 1: Schéma du matériel. schéma graphique montrant les connexions électroniques du FED. S'il vous plaît cliquer ici pour télécharger ce fichier.
Fichier supplémentaire 2: Exemple de code de sortie. fichier .CSV Exemple montrant le code de sortie du FED. S'il vous plaît cliquer ici pour télécharger ce fichier.
Supplemental Fichiers 3-6: Scripts d'analyse. Quatre scripts d'analyse sont fournis pour l'analyse des données FED: eating_rate.py, meals.py, meal_bars.py et plotmice.py. Les paramètres d'entrée et description est de fournird dans les sections commentées en haut de chaque script. S'il vous plaît cliquer ici pour télécharger ce fichier.
Subscription Required. Please recommend JoVE to your librarian.
Discussion
Le dispositif d'alimentation de Expérimentation (FED) est un système de surveillance de la prise alimentaire flexible. Ici, nous décrivons des instructions détaillées sur la fabrication et le dépannage de l'appareil, y compris l'ensemble de la 3D du matériel imprimé, la soudure de composants électriques, et le téléchargement de croquis sur les microcontrôleurs. Bien qu'il soit important de suivre toutes les étapes décrites dans le protocole attentivement, il y a des étapes critiques qui méritent une attention particulière dans chaque section pour assurer un produit final réussi. Le 3D imprimé disque rotatif doit être bien ajusté sur l'arbre du moteur pas à pas et être capable de tourner avec un minimum de résistance des pièces voisines. Lors de la soudure des connexions de broches, assurez-vous que le joint de soudure est sécurisé sans avoir excès de soudure. Veiller à ce que toutes les bibliothèques supplémentaires installés doivent être situés dans le répertoire correct avant de télécharger le script sur le microcontrôleur. Le processus d'assemblage FED implique des tâches qui sont facilement réalisables, même sans préalableexpérience dans l'impression 3D ou électronique.
Il y a quelques limitations FED. D'abord, chaque FED utilise une carte SD interne pour enregistrer et stocker des données. Les cartes SD peuvent être un moyen encombrants pour suivre et stocker des données provenant de nombreuses CÉF. Nous explorons le transfert de données sans fil pour atténuer ce problème, mais la version actuelle du FED repose sur le stockage local sur des cartes SD. D'autre part, environ 5% du temps FED distribue deux pastilles au lieu d'une. Bien que les bourrages granulés ne sont pas survenus dans nos mains assez fréquemment pour compter, cette possibilité devrait être strictement contrôlée que nous ne pouvons pas les exclure complètement. Les utilisateurs ne devraient jamais laisser des souris avec FED comme leur seule source de nourriture sans vérifier la fonctionnalité FED quotidienne. Malgré ces limites, nous croyons que le taux d'erreur de FED est acceptable pour la plupart des études de recherche. Cela dit, dans les travaux futurs, nous allons chercher à réduire ces erreurs plus loin. Enfin, la tolérance de l'impression 3D peut varier en fonction de l'imprimante 3D et du matériau. Commetels, les fichiers de conception 3D que nous fournissons peuvent avoir besoin d'être modifié pour l'impression sur d'autres modèles d'imprimante 3D, ou avec d'autres matériaux. Comme une astuce utile, nous avons constaté que d'un pistolet thermique peut être utilisé après l'impression pour adoucir les pièces imprimées en 3D pour des ajustements mineurs.
Un seul FED peut être assemblé pour environ 350 $. De ce prix, nous estimons ~ 200 $ pour l'impression 3D commerciale à partir de matériaux PLA, et ~ 150 $ pour l'achat des composants électroniques. les coûts d'impression 3D varient considérablement en fonction de la qualité et des matériaux. Il est possible de réduire considérablement ce coût si un utilisateur imprime leurs propres pièces. FED pourrait également être imprimé ou usiné à partir de matériaux plus durables comme l'acier inoxydable ou en aluminium, bien que ce serait plus coûteux.
Nous avons choisi de construire FED avec un microcontrôleur sur une carte de circuit programmable avec une plate-forme open-source. Pour cela, nous avons choisi le microcontrôleur open source (voir le tableau des matériaux) car il a unfaible consommation d'énergie. Cependant, notre code devrait fonctionner sur un conseil qui a des broches d'entrée / sortie suffisantes. Modification des cartes microcontrôleur exigera probablement des modifications mineures au code. Nous fournissons tous les fichiers de conception et de code en ligne, et notre conception est open-source pour fournir aux chercheurs la flexibilité de modifier FED pour répondre à leurs besoins, y compris l'utilisation d'autres cartes microcontrôleur.
Il y a une tendance croissante vers le matériel open-source pour la recherche scientifique. Divers groupes ont fait des dispositifs open-source pour la recherche en neurosciences, y compris OpenControl, un logiciel pour la vidéo animaux de suivi au cours de tâches comportementales 7; ROBucket, une chambre opérante à base d'Arduino pour la livraison de résultats liquide 8; ELOPTA, un dispositif opérant à base PICmicro pour pellets livraison de résultats 9; et BEEtag, un système de suivi basé sur l' image pour bourdons 10. FED complète ceux-ci avec son facteur de forme unique et lcoût ow. Un objectif clé de la FED était de le rendre open-source. matériel open-source permet aux chercheurs d'effectuer quelques réglages mineurs aux dessins et modèles (par exemple pour modifier les dimensions), mais elle est particulièrement puissante lorsque les utilisateurs effectuent des modifications majeures pour étendre la fonctionnalité du matériel. Par exemple, il est assez facile de modifier la conception du FED pour le montage sur une cage, qui protège à la fois FED et augmente l' espace au sol dans la cage (figure 5A). En outre, nous avons conçu FED pour avoir de la place pour le nez-pokes de chaque côté de l'alimentation et de la formation opérante, et nous avons mis en œuvre avec succès ces derniers avec des modifications mineures de conception (figure 5B). Nous afficherons ces développements sur notre site Web (https://github.com/KravitzLab/fed), où nous sommes également impatients d'accueillir d'autres telles améliorations de la communauté de recherche.
Subscription Required. Please recommend JoVE to your librarian.
Acknowledgments
Ce travail a été soutenu par le programme intra-muros de recherche du National Institutes of Health (NIH), l'Institut national du diabète et des maladies digestives et rénales (NIDDK). Nous remercions la Section NIH Instrumentation et la Bibliothèque NIH pour l'assistance avec l'impression 3D.
Materials
| Name | Company | Catalog Number | Comments |
| Electronics | |||
| Adafruit Motor/Stepper/Servo Shield for Arduino v2 Kit - v2.3 | Adafruit | 1438 | Use of other motor shields has not been tested and will require changes to the code |
| Adafruit Assembled Data Logging shield for Arduino | Adafruit | 1141 | Use of other data logging shields has not been tested and will require changes to the code |
| PowerBoost 500 Charger | Adafruit | 1944 | Other voltge regulator boards have not been tested, but should work if they have similar specifications |
| FTDI Friend + extras - v1.0 | Adafruit | 284 | Any FTDI-USB connection will work |
| Small Reduction Stepper Motor - 5VDC 32-Step 1/16 Gearing | Adafruit | 858 | Use of other stepper motors has not been tested |
| Arduino Pro 328 - 5V/16MHz | SparkFun | DEV-10915 | Other Arduino boards should work, although may require changes to the code |
| Photo Interrupter - GP1A57HRJ00F | SparkFun | SEN-09299 | Other photointerrupters will work, but may require changes to the 3D design |
| SparkFun Photo Interrupter Breakout Board - GP1A57HRJ00F | SparkFun | BOB-09322 | Other photointerrupters will work, but may require changes to the 3D design |
| Connectors, screws, and miscellaneous items | |||
| Shield stacking headers for Arduino (R3 Compatible) | Adafruit | 85 | Any stacking header that says Arduiono R3 compatible will work |
| Multi-Colored Heat Shrink Pack - 3/32" + 1/8" + 3/16" | Adafruit | 1649 | Any heatshrink will work |
| Hook-up Wire Spool Set - 22AWG Solid Core - 6x25ft | Adafruit | 1311 | Any wire will work |
| Lithium Ion Battery Pack - 3.7V 4400 mAh | Adafruit | 354 | Any 3.7 V Lithium battery with a JST connector will work |
| SD/MicroSD Memory Card (8GB SDHC) | Adafruit | 1294 | Any SD card will work |
| 50 Ohm BNC Bulkhead Jack (3/8" D-Hole) | L-com | BAC70A | Any BNC bulkhead will work |
| Type 316 Stainless Steel Pan Head Phillips Sheet metal screw, No 6 size, 1/4" Length | McMaster-Carr | 90184A120 | Any screws of this specification will work |
| Type 316 Stainless Steel Pan Head Phillips Sheet metal screw, No 2 size, 1/4" Length | McMaster-Carr | 91735A102 | Any screws of this specification will work |
| Nylon 100 Degree Flat Head Slotted Machine Screw, 4-40 Thread, 1" Length | McMaster-Carr | 90241A253 | Any screws of this specification will work |
| Nylon Hex Nut, 4-40 Thread Size | McMaster-Carr | 94812A200 | Any nut of this specification will work |
| 2 Pin JST M F Connector 200 mm 22AWG Wire Cable | NewEgg | 9SIA27C3FY2876 | Any 2 pin connector will work for this connection |
| Metal Pushbutton - Latching (16 mm, Red) | SparkFun | COM-11971 | Any push button or switch will work |
| Resistor Kit - 1/4 W | SparkFun | COM-10969 | Any 1/4 W resistors will work |
References
- Ellacott, K. L., Morton, G. J., Woods, S. C., Tso, P., Schwartz, M. W. Assessment of feeding behavior in laboratory mice. Cell Metab. 12 (1), 10-17 (2010).
- Betley, J. N., et al. Neurons for hunger and thirst transmit a negative-valence teaching signal. Nature. 521 (7551), 180-185 (2015).
- van den Heuvel, J. K., et al. Neuropeptide Y activity in the nucleus accumbens modulates feeding behavior and neuronal activity. Biol Psychiatry. 77 (7), 633-641 (2015).
- Cone, J. J., Roitman, J. D., Roitman, M. F. Ghrelin regulates phasic dopamine and nucleus accumbens signaling evoked by food-predictive stimuli. J Neurochem. 133 (6), 844-856 (2015).
- Ulman, E. A., Compton, D., Kochanek, J. Measuring food and water intake in rats and mice. ALN Mag. , 17-20 (2008).
- Nguyen, K. P., O'Neal, T. J., Bolonduro, O. A., White, E., Kravitz, A. V. Feeding Experimentation Device (FED): A flexible open-source device for measuring feeding behavior. J Neurosci Methods. 267, 108-114 (2016).
- Aguiar, P., Mendonca, L., Galhardo, V. OpenControl: a free opensource software for video tracking and automated control of behavioral mazes. J Neurosci Methods. 166 (1), 66-72 (2007).
- Devarakonda, K., Nguyen, K. P., Kravitz, A. V. ROBucket: A low cost operant chamber based on the Arduino microcontroller. Behav Res Methods. 48 (2), 503-509 (2016).
- Hoffman, A. M., Song, J., Tuttle, E. M. ELOPTA: a novel microcontroller-based operant device. Behav Res Methods. 39 (4), 776-782 (2007).
- Crall, J. D., Gravish, N., Mountcastle, A. M., Combes, S. A. BEEtag: A Low-Cost, Image-Based Tracking System for the Study of Animal Behavior and Locomotion. PLoS One. 10 (9), (2015).

{kind=link}
{kind=link}