


Introduction
Com o aumento da obesidade global durante a última parte do século 20, não é renovada atenção sobre os mecanismos subjacentes alimentação 1, 2, 3, 4. Tipicamente, a ingestão de alimentos é pesado manualmente 5, ou com sistemas de alimentação comercialmente disponíveis. sistemas comerciais são excelentes, mas fornecem uma flexibilidade limitada em modificar seus desenhos ou código. Aqui, descrevemos o dispositivo de alimentação Experimentação (FED): um sistema de alimentação de fonte aberta para medir a ingestão de alimentos com resolução temporal fino e mínima interferência humana 6. FED é a pilhas e totalmente contido dentro de uma caixa impressa em 3D que pode caber dentro de gaiolas em rack colónia padrão ou outro equipamento científico.
No seu estado estacionário, FED opera em um modo de baixo consumo de energia com um descanso pellet alimentos em sua foOD bem. A presença do pelete é monitorizada através de um feixe de infravermelhos. Quando um rato remove uma pelota, um sensor Photointerrupter envia um sinal para o microcontrolador e o carimbo de tempo é registrado no cartão de bordo Secure Digital (SD). Ao mesmo tempo, uma saída lógica de transístor-transístor (TTL) fornece uma saída em tempo real da recuperação de sedimento. seguindo este evento imediatamente, o motor gira para dispensar uma outra pelota, eo sistema retorna ao seu modo de baixa energia. Devido à sua natureza de código aberto, FED pode ser modificada e melhorada para atender às necessidades específicas de investigação. Por exemplo, o código pode ser facilmente alterada para limitar a alimentação de momentos específicos do dia, ou para parar a distribuição, quando tiver sido atingido um certo número de peletes, sem a necessidade de intervenção humana.
Aqui, descrevemos as instruções passo-a-passo para a construção, validação e utilização de FED para medir a ingestão de alimentos em ratos. Nós fornecemos uma lista de todos os componentes para a construção de um sistema. É importante ressaltar que nenhum ex préviaperiência em eletrônica é necessário para construir FED.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
NOTA: Este protocolo é escrito para componentes especificamente indicados na Tabela de Materiais. Enquanto funcionalidade semelhante pode ser conseguido usando outro hardware, FED foi programado para o Pro microcontrolador Arduino (doravante denominado: microcontrolador) e acessórios relacionados. Outros microcontroladores pode funcionar igualmente bem, mas vai exigir que o usuário modificar o código para apoiá-los. análise de dados off-line foi codificada utilizando a linguagem de programação Python.
1. Preparação e Instalação de Software
- Adquirir componentes eletrônicos necessários para construir FED (ver Tabela 1 andFed Github BoM.xlxs em: https://github.com/KravitzLab/FED/tree/master/doc).
NOTA: fornecedores alternativos podem ser utilizados para muitas partes nesta tabela, desde que tenham as especificações equivalentes. - Imprimir todos os componentes projetados 3D (Figura 1, disponível em: https://github.com/KravitzLab/FED/wiki/3D-Printed-Components). impressoras 3D com 200 micronresolução deve ser capaz de imprimir FED.
- Baixar e instalar a plataforma de ambiente de desenvolvimento integrado (IDE) para programar o microcontrolador.
- Baixar e instalar bibliotecas adicionais para habilitar a funcionalidade do escudo do motor e registrador de dados (disponível em: https://github.com/KravitzLab/fed/tree/master/fed-arduino).
- Adquirir ferramentas necessárias para a montagem (por exemplo, um ferro de solda, pistola de calor, solda, descascadores de fios, alicate de bico, e ambos flat-cabeça e chaves de fenda).
2. solda Componentes Elétricos
NOTA: Utilize tubos com contração térmica para proteger todas as juntas soldadas. Antes de conexões de solda, deslize um pedaço de tubo envoltório do psiquiatra (~ 2 cm) tubulação ao redor um dos fios. Depois de soldar a conexão, centralizar a tubulação no ponto de conexão e usar uma pistola de calor para aquecer a retrair a blindagem.
- Preparando conectores (Figura 2A)
- Prepare quatro pares de conectores JST de 2 pinos erotular ambos os lados macho e fêmea "A", "B", "C" e "D", respectivamente. Remover o fio vermelho de ambos os lados do conector par "D".
- Prepare um 3 pinos par de conector JST e rotular ambos os lados masculino e feminino "E".
- Microcontrolador e empilháveis escudos (Figura 2B)
- Solda cabeçalhos empilháveis fêmeas com encaixes no lado superior do microcontrolador. Clipe de fio salientes cabeçalhos na parte inferior do microcontrolador.
- Solda feminina cabeçalhos empilháveis com soquetes na parte superior do escudo de registro de dados SD. Deixar salientes fios na parte inferior do escudo.
- Solda cabeçalhos do sexo masculino para a blindagem do motor com os pinos salientes a partir do fundo.
- Coloque uma bateria de células de moeda na ranhura do escudo SD para fornecer energia para o módulo de relógio em tempo real.
- Botão de alimentação externa (Figura 2C)
NOTA: A trava de metal botão has cinco conexões: alimentação, terra, normalmente fechado (NC1), normalmente aberto (NO1) e comum (C1).- Soldar o conector de 2 pinos macho "A" para C1 (uso de fio vermelho) e solo (usar fio preto). Térmicos de todas as conexões.
- Soldar o 2 pinos macho conector "B" para + (uso de fio vermelho) e NO1 (use fio preto). Térmicos de todas as conexões.
- Photointerrupter (Figura 2D)
- Photointerrupter solda (a parte preta) a fuga bordo.
- Solde um resistor 4.7K à frente do conselho de fuga.
- Soldar o macho de 3 pinos do conector "E" na parte de trás da placa de fuga: fio vermelho para PWR, fio verde para GND e fio branco à SGL.
- Apare os fios soltos na parte de trás do Photointerrupter sair bordo.
- Placa de impulso (Figura 2E)
- Soldar o 2 pinos conector fêmea "A" para 5V e Terra pinos da placa de impulso.
- Soldar o fio preto da maconector le "D" para o pino GND adicional na placa do impulso.
- Cabo de saída BNC (opcional: Figura 2F)
- Soldar o 2 pinos do conector "C" para os terminais de um cabo BNC (fio vermelho ao pino central, fio preto ao pino de fora).
NOTA: Para a montagem, o conector de 2 pinos deve caber através da porca na ficha BNC. Nós usamos um conector menor, ou barbear-se o conector JST com uma lâmina de barbear para torná-lo apto.
- Soldar o 2 pinos do conector "C" para os terminais de um cabo BNC (fio vermelho ao pino central, fio preto ao pino de fora).
- Escudo do motor (Figura 2G)
- Torça os fios vermelho e preto fêmea do conector "B" juntos e solda para V in.
- Soldar o fio preto do conector fêmea "C" para o pino terra ao lado de Aref, eo fio vermelho deste conector para o pino 3.
- Soldar o fio preto do conector fêmea "D" para o pino terra ao lado V in.
- Soldar o fio verde do conector fêmea "E" para o pino terraao lado de 5V, o fio vermelho de este conector para 5V, eo fio branco deste conector para o pino 2.
3. Software Carregar
- Ligue a placa de fuga FTDI para os pinos de programação do microcontrolador, e depois conectar bordo de fuga FTDI ao computador através do cabo micro USB.
- Abra o programa IDE (ambiente de desenvolvimento integrado).
- Seleccione a placa do microcontrolador correta para o carregamento de software através de Ferramentas> menu suspenso Board.
- Selecione ATmega 328 (5V, 16MHz) através do menu Ferramentas> Processor.
- Selecione a porta que o microcontrolador é ligado ao meio de ferramentas> Port> COM # (irá variar dependendo de qual porta está atualmente em uso).
- Clique no botão "upload" para carregar o esboço FED para o conselho (disponível em: https://github.com/KravitzLab/fed/tree/master/fed-arduino).
4. Hardware Assembly
- Motor de passo e motor escudo (Figuras 1C e 3A e 3B)
- Fixe o motor de passo 5V para o 3D impresso montagem do motor com dois # 6 x ¼ "parafusos de chapas metálicas (Figuras 1C e 3A).
- Insira o disco de rotação do motor para montagem e empurre para baixo para fixar firmemente ao eixo do motor de passo (Figura 3B).
- Torção no 3D silo alimentos impressas em montagem do motor certificando-se o braço pellet nivelador é sobre o buraco no motor de montagem.
- Torcer em peças ligadas de acima (passos 4.1.1 - 4.1.3) para o topo da base impressa, com o motor de passo posicionado para a parte traseira da base e do orifício posicionado na parte da frente.
- Cortar o conector de 5 pinos de os fios do motor de passo e tiras ~ 2 mm a partir da extremidade de cada fio.
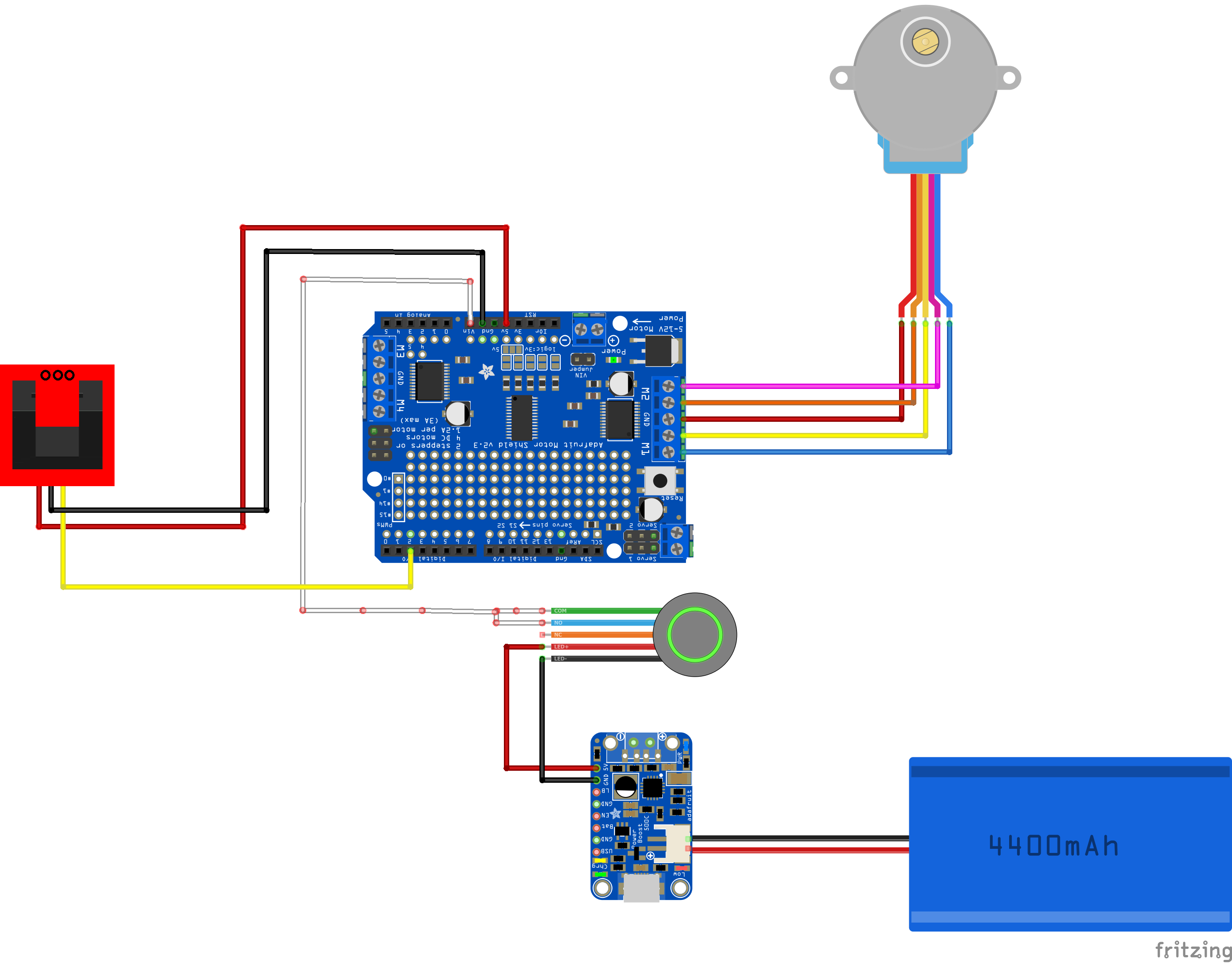
- Conecte os fios de motor de passo para os conectores do bloco de terminais na blindagem do motor: vermelho para o solo, laranja e rosa a uma porta do motor (por exemplo, M1), e azul e amarelo para o outro motor porta (por exemplo, M2).
- Botão de energia externa
- Remova a porca do botão de alimentação e inserir o botão de energia para o buraco no lado direito da base. Seguro botão no lugar com a porca hexagonal.
- Photointerrupter (Figura 3C)
- Coloque o Photointerrupter no seu alojamento impressa em 3D.
NOTA: usar uma pistola de calor para aquecer a habitação se o Photointerrupter não assentar em todo o caminho. - String O macho de 3 pinos do conector "E" do Photointerrupter (PWR, GND, e SGL) através do orifício do meio da frente da base impressa em 3D.
- Fixe a caixa na base FED com dois parafusos 1 "nylon e porcas correspondentes.
- Coloque o Photointerrupter no seu alojamento impressa em 3D.
- Cabo de saída BNC (opcional)
- Insira o conector BNC no buraco no lado esquerdo da base do FED. Fixe no lugar com a porca.
- Se conector BNC não é usado, Ralo com ficha impressa em 3D.
- Bateria e impulso pensão (Figura 3D)
- Conectar 3.7 V bateria para o módulo boost conversor DC / DC através do JST conexão de 2 pinos. O LED azul na placa de impulso acenderá se a bateria está carregada.
- Placas de montagem dentro da caixa (Figura 3E)
- Mount microcontrolador interior da base com conexões FTDI de frente para o interruptor de alimentação, usando # 4 x ¼ "parafusos de metal de folha de aço.
- Empilhar escudo do motor e protetor de registro de dados no topo do microcontrolador.
- Parafuso a placa de impulso para o caso, utilizando # 2 x ¼ "parafusos de metal de folha de aço. Mount impulso com o slot micro-SD apontando para baixo. FED pode ser carregada através desta porta sem abrir o caso.
- Ligue os cinco conectores, "A" masculino para "A" feminino "B" masculino para feminino "B", etc.
- Coloque a bateria dentro da base impressa em 3D e deslizando a tampa traseira estreita. Deslizar sobre a placa de cara impressa em 3D.
5. Validação e Aquisição de Dados
NOTA: Antes de ligar um sistema FED, assegurar um cartão SD é inserido no escudo SD, caso contrário, FED não vai dispensar pellets. Além disso, certifique-se de jumper de energia no escudo motor (logo acima do bloco de poder) está no lugar.
- Ligue o sistema FED com a funcionalidade botão de alimentação e dispositivo de teste.
- Preencha silo de alimentos com 20 pelotas do alimento mg antes de ligar.
NOTA: O interruptor de alimentação deve acender, tal como os LEDs no microcontrolador, escudo SD, e escudo motor. Se não houver nenhum sedimento no poço, deve-se dispensar. - remover manualmente 5 - 10 pelotas do alimento bem e confirmar que a substituição pelotas são dispensados.
- Preencha silo de alimentos com 20 pelotas do alimento mg antes de ligar.
- Remova o cartão SD e verificar se os dados foram registrados corretamente. Os dados devem ser adquiridos em um valor separados por vírgulas (CSV) que é nomeado de acordo com o vaFILENAME riable no código.
- Coloque unidade FED dentro configuração experimental, alimentação e garantir que a pelota é dispensado para os alimentos também.
- Ao longo de aquisição de dados, verifique alimentados diariamente para verificar se ele está funcionando corretamente, confirmando que a luz LED no interruptor de alimentação está ligada (isto indica que a bateria tem carga suficiente) e um pellet está sentado na comida bem (indica que não existem problemas com a distribuição sedimento).
- Após a aquisição de dados, recuperar cartão SD e arquivo de acesso .csv.
NOTA: os scripts de análise para refeições e padrões de alimentação estão disponíveis em: https://github.com/KravitzLab/fed.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
Testes de validação envolvendo o uso de animais foram revistos e aprovados pelo Comitê de Cuidado e Uso do animal no Instituto Nacional de Diabetes e Doenças Digestivas e Renais. Para demonstrar o uso do FED para medir casa alimentação gaiola, fêmea adulta C57BL 6 ratos / (n = 4) foram alojados individualmente com acesso ad libitum à água e ração padrão de laboratório sob um 12/12 h ciclo de luz / escuridão (luzes acesas às 05:00). Depois de um período de habituação de uma semana, a tremonha de alimentação foi removido e substituído com um alimentadas durante cinco dias de testes de validação. No final do período de teste, feds foram removidos das gaiolas e dados de alimentação a partir de cada placa SD foi analisada utilizando costume, os scripts livremente disponíveis e um programa de folha de cálculo. Como mostrado na Figura 4A, a recuperação da pelota para ratinhos individuais (painel superior; rasterizações indicam única pelota eventos de recuperação) e a recuperação média da pelota em todos os ratinhos em caixas de 30 min (Bopainel ttom; linha indica significa ± SEM) mostram alimentação contínua em todo o período de testes de validação, com ritmicidade circadiana claramente visualizado. Para quantificar a precisão da capacidade de registro de dados do FED, cada sistema FED foi dada 1000 pelotas para o período de testes de validação e os sedimentos restantes foram contadas manualmente e comparados com os dados registrados no cartão SD. FED logado 95,35 ± 1,25% de pelotas que foram dispensados para o cartão SD (Figura 4B).

Figura 1: 3D Projetado FED Components. Medidas (A) do FED montado. (B) vista explodida de componentes impressos em 3D em um FED montado. (C) vista explodida da montagem pellet funil completo (à esquerda), montagem de motor de passo de rotação do disco (meio), e montagem de silos de alimentos para rotação do disco (right). (D) Projeto de alimentos bem com os braços para proteger a Photointerrupter para a detecção da pelota. (E) Fotografia do FED totalmente montado. Por favor clique aqui para ver uma versão maior desta figura.

Figura 2: Ligação do FED componentes elétricos. Fiação e montagem de (A) Conectores (B) microcontrolador, escudo de dados de log / SD, Motor escudo, (C) Botão de alimentação, (D) Photointerrupter, (E) bordo Boost, cabo de saída (F) BNC, (G) Fiação do escudo do motor. Por favor clique aqui para ver uma versão maioresta figura.

Figura 3: Montagem do FED Hardware. (A) de montagem de motor de passo (à esquerda) para montagem do motor e anexando disco pellet (direita). (B) do motor Fiação de passo a blindagem do motor. (C) Inserindo Photointerrupter em 3D impresso habitação. (D) Colocação da bateria para impulsionar bordo. (E) Boards montadas dentro FED habitação. Por favor clique aqui para ver uma versão maior desta figura.

Figura 4: dados representativos ingestão de alimentos recolhidos através FED. Dados de consumo alimentar (A) recolhidas através FED e visualizados usando scripts de análise de código-fonte aberto. Painel superior: rasters individuais indicam eventos de recuperação de pellet de solteiro, com linhas contendo ratos individuais. Painel inferior: linha indica significa ± SEM de ingestão de alimentos em toda a ratos (n = 4). (B) Precisão de unidades FED individuais no log dispensado pellets. Cores correspondem com rasters na Figura 3A. Por favor clique aqui para ver uma versão maior desta figura.

Figura 5: usos modificados para FED. (A) montado externamente FED reduz espaço em gaiolas de roedores. (B) A alteração da configuração de front-face permite a adição de duas portas nariz puxão para a formação operante.ve.com/files/ftp_upload/55098/55098fig5large.jpg "target =" _ blank "> Clique aqui para ver uma versão maior desta figura.
Suplementar Arquivo 1: Representação esquemática do Hardware. esquemático gráfico mostrando as conexões eletrônicas do FED. Por favor clique aqui para baixar esse arquivo.
Suplementar Arquivo 2: Código de exemplo de saída. arquivo CSV de exemplo mostrando código da FED saída. Por favor clique aqui para baixar esse arquivo.
Suplementar Arquivos 3-6: Scripts de análise. Quatro scripts de análise são fornecidos para a análise de dados do Fed: eating_rate.py, meals.py, meal_bars.py e plotmice.py. parâmetros de entrada e descrição é fornecerd nas secções comentado na parte superior de cada script. Por favor clique aqui para baixar esse arquivo.
Subscription Required. Please recommend JoVE to your librarian.
Discussion
O dispositivo de alimentação de Experimentação (FED) é um sistema de monitoramento da ingestão alimentar flexível. Aqui, descrevemos instruções detalhadas sobre como fabricar e solução de problemas do dispositivo, incluindo a montagem de 3D hardware impresso, soldagem de componentes elétricos, e upload de esboços para os microcontroladores. Embora seja importante seguir todas as etapas descritas no protocolo com cuidado, há passos críticos que merecem atenção extra em cada seção para garantir um produto final bem sucedido. O 3D impresso rotativo de discos deve caber confortavelmente no eixo do motor de passo e ser capaz de rodar com resistência mínima de partes vizinhas. Ao soldar as conexões de pinos, certifique-se de que a junta de solda é seguro sem ter excesso de solda. Certifique-se de que todas as bibliotecas adicionais instalados devem estar localizados no diretório correto antes de enviar o roteiro para o microcontrolador. O processo de montagem FED envolve tarefas que são facilmente realizáveis, mesmo sem préviaexperiência na impressão ou eletrônica 3D.
Existem algumas limitações com FED. Primeiro, cada FED usa um cartão SD interna para registrar e armazenar dados. Os cartões SD pode ser um meio pesados para rastrear e armazenar dados de muitas federais. Estamos explorando a transferência de dados sem fio para aliviar este problema, mas a iteração atual do FED depende de armazenamento local em cartões SD. Em segundo lugar, ~ 5% do tempo ALIMENTADO dispensa duas pastilhas de uma vez. Enquanto compotas de pelotização não ter ocorrido em nossas mãos com frequência suficiente para contar, esta possibilidade deve ser rigorosamente controlada, já que não pode erradicá-los completamente. Os usuários nunca devem deixar os ratos com FED como sua única fonte de alimento sem verificar a funcionalidade do FED diária. Apesar dessas limitações, acreditamos que a taxa de erro do FED é aceitável para a maioria dos estudos de investigação. Dito isto, em trabalhos futuros, vamos buscar para diminuir esses erros ainda mais. Finalmente, a tolerância de impressão em 3D pode variar, dependendo da impressora 3D específico e material. Comotais, os arquivos de projeto 3D que prestamos pode precisar de ser ajustado para imprimir em outros modelos de impressora 3D, ou com outros materiais. Como uma dica útil, descobrimos que uma pistola de calor pode ser usado após a impressão para suavizar as peças impressas em 3D para pequenos ajustes.
Um único FED pode ser montado por aproximadamente US $ 350. Desse preço, estimamos ~ US $ 200 para impressão 3D comercial de material PLA, e ~ US $ 150 para comprar os componentes eletrônicos. custos de impressão 3D variam muito, dependendo da qualidade e material. É possível reduzir esse custo consideravelmente se um utilizador imprimir as suas próprias peças. Fed também pode ser impresso, ou maquinados a partir de materiais mais duráveis, tais como aço inoxidável ou alumínio, mas este seria mais caro.
Nós escolhemos para construir FED com um microcontrolador em uma placa de circuito programável com uma plataforma de código aberto. Para isso, escolhemos o microcontrolador open source (ver Tabela de Materiais), pois tem umbaixo consumo de energia. No entanto, o nosso código deve funcionar em qualquer placa que tem suficientes pinos de entrada / saída. Alterar placas de microcontroladores provavelmente vai exigir pequenas alterações no código. Nós fornecemos todos os arquivos de projeto e código online, e nosso projeto é open-source para fornecer pesquisadores com flexibilidade para modificar FED para atender às suas necessidades, incluindo o uso de outras placas de microcontroladores.
Há uma tendência crescente para hardware open-source para a pesquisa científica. Vários grupos fizeram dispositivos de código aberto para a pesquisa em neurociência, incluindo OpenControl, um software para vídeo animais de rastreamento durante tarefas comportamentais 7; ROBucket, uma câmara operante baseado em Arduino para entrega resultado líquido 8; ELOPTA, um dispositivo operante com base em PIC para a pelota de entrega desfecho 9; e BEEtag, um sistema de rastreamento baseado na imagem para abelhas 10. FED complementa-los com seu fator de forma única e lcusto ow. Um dos principais objectivos para FED foi para torná-lo open-source. hardware de código aberto permite que os pesquisadores para realizar pequenos ajustes de projetos (por exemplo, para modificar as dimensões), mas é particularmente poderosa quando os usuários realizam grandes modificações para expandir a funcionalidade do hardware. Por exemplo, é bastante fácil de modificar o desenho de ALIMENTADO para montagem externa sobre uma gaiola, que protege tanto ALIMENTADO e aumenta espaço no interior da gaiola (Figura 5A). Além disso, nós projetamos FED ter espaço para nariz-puxões de cada lado da alimentação bem para o treinamento operacional e implementaram com sucesso estes com alterações de design menores (Figura 5B). Vamos postar tais desenvolvimentos em nosso site (https://github.com/KravitzLab/fed), onde também ansiosos para hospedar outras melhorias da comunidade de investigação.
Subscription Required. Please recommend JoVE to your librarian.
Acknowledgments
Este trabalho foi apoiado pelo Programa de Investigação Intramural do National Institutes of Health (NIH), o Instituto Nacional de Diabetes e Doenças Digestivas e Renais (NIDDK). Agradecemos a Seção NIH em Instrumentação e da Biblioteca NIH para obter ajuda com a impressão 3D.
Materials
| Name | Company | Catalog Number | Comments |
| Electronics | |||
| Adafruit Motor/Stepper/Servo Shield for Arduino v2 Kit - v2.3 | Adafruit | 1438 | Use of other motor shields has not been tested and will require changes to the code |
| Adafruit Assembled Data Logging shield for Arduino | Adafruit | 1141 | Use of other data logging shields has not been tested and will require changes to the code |
| PowerBoost 500 Charger | Adafruit | 1944 | Other voltge regulator boards have not been tested, but should work if they have similar specifications |
| FTDI Friend + extras - v1.0 | Adafruit | 284 | Any FTDI-USB connection will work |
| Small Reduction Stepper Motor - 5VDC 32-Step 1/16 Gearing | Adafruit | 858 | Use of other stepper motors has not been tested |
| Arduino Pro 328 - 5V/16MHz | SparkFun | DEV-10915 | Other Arduino boards should work, although may require changes to the code |
| Photo Interrupter - GP1A57HRJ00F | SparkFun | SEN-09299 | Other photointerrupters will work, but may require changes to the 3D design |
| SparkFun Photo Interrupter Breakout Board - GP1A57HRJ00F | SparkFun | BOB-09322 | Other photointerrupters will work, but may require changes to the 3D design |
| Connectors, screws, and miscellaneous items | |||
| Shield stacking headers for Arduino (R3 Compatible) | Adafruit | 85 | Any stacking header that says Arduiono R3 compatible will work |
| Multi-Colored Heat Shrink Pack - 3/32" + 1/8" + 3/16" | Adafruit | 1649 | Any heatshrink will work |
| Hook-up Wire Spool Set - 22AWG Solid Core - 6x25ft | Adafruit | 1311 | Any wire will work |
| Lithium Ion Battery Pack - 3.7V 4400 mAh | Adafruit | 354 | Any 3.7 V Lithium battery with a JST connector will work |
| SD/MicroSD Memory Card (8GB SDHC) | Adafruit | 1294 | Any SD card will work |
| 50 Ohm BNC Bulkhead Jack (3/8" D-Hole) | L-com | BAC70A | Any BNC bulkhead will work |
| Type 316 Stainless Steel Pan Head Phillips Sheet metal screw, No 6 size, 1/4" Length | McMaster-Carr | 90184A120 | Any screws of this specification will work |
| Type 316 Stainless Steel Pan Head Phillips Sheet metal screw, No 2 size, 1/4" Length | McMaster-Carr | 91735A102 | Any screws of this specification will work |
| Nylon 100 Degree Flat Head Slotted Machine Screw, 4-40 Thread, 1" Length | McMaster-Carr | 90241A253 | Any screws of this specification will work |
| Nylon Hex Nut, 4-40 Thread Size | McMaster-Carr | 94812A200 | Any nut of this specification will work |
| 2 Pin JST M F Connector 200 mm 22AWG Wire Cable | NewEgg | 9SIA27C3FY2876 | Any 2 pin connector will work for this connection |
| Metal Pushbutton - Latching (16 mm, Red) | SparkFun | COM-11971 | Any push button or switch will work |
| Resistor Kit - 1/4 W | SparkFun | COM-10969 | Any 1/4 W resistors will work |
References
- Ellacott, K. L., Morton, G. J., Woods, S. C., Tso, P., Schwartz, M. W. Assessment of feeding behavior in laboratory mice. Cell Metab. 12 (1), 10-17 (2010).
- Betley, J. N., et al. Neurons for hunger and thirst transmit a negative-valence teaching signal. Nature. 521 (7551), 180-185 (2015).
- van den Heuvel, J. K., et al. Neuropeptide Y activity in the nucleus accumbens modulates feeding behavior and neuronal activity. Biol Psychiatry. 77 (7), 633-641 (2015).
- Cone, J. J., Roitman, J. D., Roitman, M. F. Ghrelin regulates phasic dopamine and nucleus accumbens signaling evoked by food-predictive stimuli. J Neurochem. 133 (6), 844-856 (2015).
- Ulman, E. A., Compton, D., Kochanek, J. Measuring food and water intake in rats and mice. ALN Mag. , 17-20 (2008).
- Nguyen, K. P., O'Neal, T. J., Bolonduro, O. A., White, E., Kravitz, A. V. Feeding Experimentation Device (FED): A flexible open-source device for measuring feeding behavior. J Neurosci Methods. 267, 108-114 (2016).
- Aguiar, P., Mendonca, L., Galhardo, V. OpenControl: a free opensource software for video tracking and automated control of behavioral mazes. J Neurosci Methods. 166 (1), 66-72 (2007).
- Devarakonda, K., Nguyen, K. P., Kravitz, A. V. ROBucket: A low cost operant chamber based on the Arduino microcontroller. Behav Res Methods. 48 (2), 503-509 (2016).
- Hoffman, A. M., Song, J., Tuttle, E. M. ELOPTA: a novel microcontroller-based operant device. Behav Res Methods. 39 (4), 776-782 (2007).
- Crall, J. D., Gravish, N., Mountcastle, A. M., Combes, S. A. BEEtag: A Low-Cost, Image-Based Tracking System for the Study of Animal Behavior and Locomotion. PLoS One. 10 (9), (2015).

{kind=link}
{kind=link}