


Introduction
20 世紀の後半にわたってグローバル肥満の上昇に伴って、1、2、3、4を供給する基礎となるメカニズムに注目が更新されます。典型的には、食物摂取を手動5、または市販の供給システムに計量します。商用システムは優れているが、そのデザインやコードを変更するには限られた柔軟性を提供します。細かい時間分解能と最小限の人間の干渉を6で食物摂取を測定するためのオープンソースの供給システム:ここでは、給餌実験装置(FED)を記述します。 FEDは、バッテリ駆動、完全に標準コロニーラックケージまたはその他の科学機器の内部に収まることができ、3D印刷ケース内に含まれています。
その定常状態では、FEDは、そのfoの食品ペレット安静時と低電力モードで動作しますよくOD。ペレットの存在は、赤外線を介して監視されます。マウスがペレットを削除すると、フォトインタラプタセンサは、マイクロコントローラに信号を送信し、タイムスタンプは、オンボードのセキュアデジタル(SD)カードに記録されます。同時に、トランジスタ - トランジスタ論理(TTL)出力ペレット検索のリアルタイム出力を提供します。すぐにこのイベント以下、モータは他のペレットを分配するように回転させ、システムは低電力モードに戻ります。 、そのオープンソースの性質のために、FEDは、修飾および特定の研究の必要性に適合するように改善することができます。たとえば、コードは人間の干渉を必要とせずに、一日の特定の時間に給電を制限する、またはペレットの数に達したときに小出しを停止するように容易に変更することができます。
ここでは、マウスにおいて食物摂取を測定するためのFEDの構築、検証、および使用するための手順の概要を説明します。我々は、システムを構築するすべてのコンポーネントのリストを提供します。重要なことは、事前元ませんエレクトロニクスにおけるペリエンスはFEDを構成するために必要とされています。
Subscription Required. Please recommend JoVE to your librarian.
Protocol
注:このプロトコルは、特に材料の表に名前のコンポーネントのために書かれています。記載されている付属品:同様の機能は、他のハードウェアを使用して達成することができますが、FEDは、Arduinoのプロマイクロコントローラ(マイコン今後とも呼ばれる)のためにプログラムされました。他のマイクロコントローラは、同様に機能することができるが、それらをサポートするためのコードを変更し、ユーザーが必要になります。オフラインでデータ分析は、Pythonプログラミング言語を用いて符号化されました。
1.準備およびソフトウェアのインストール
- FEDを(:https://github.com/KravitzLab/FED/tree/master/docで表1 andFed GithubのBoM.xlxsを参照)を構築するために必要な電子部品を調達しています。
注意:代替の供給業者は、この表に多くの部品に使用することができるが、それらは同等の仕様を持っていました。 - (:https://github.com/KravitzLab/FED/wiki/3D-Printed-Componentsで入手可能な図1、)すべての3D設計されたコンポーネントを印刷します。 200ミクロンと3Dプリンタ解像度は、FEDを印刷することができなければなりません。
- マイクロコントローラをプログラムするための統合開発環境(IDE)のプラットフォームをダウンロードしてインストールします。
- (:https://github.com/KravitzLab/fed/tree/master/fed-arduinoで入手可能)モーターシールドとデータロガーの機能を有効にするために、追加のライブラリをダウンロードしてインストールします。
- 組み立てに必要なツールを調達( 例えば 、はんだごて、ヒートガン、ハンダ、ワイヤーストリッパー、ラジオペンチ、フラットヘッドとドライバーの両方)。
2.はんだ付け電気部品
注:すべての半田付け接合部を保護するために、熱収縮チューブを使用してください。はんだ付け接続する前に、ワイヤーの1の周りにシュリンクラップチューブの一片(約2センチ)チューブをスライドさせます。接続をハンダ付けした後、接続ポイントにチューブを中心と収縮チューブを加熱するためにヒートガンを使用しています。
- 準備のコネクタ(図2A)
- 4 2ピンJSTコネクターのペアを準備し、それぞれ、オスとメス側 "A"、 "B"、 "C"、および "D"の両方を標識します。コネクタ対「D」の両側から赤い線を削除します。
- 1 3ピンJSTコネクターのペアを準備し、男性と女性の側面 "E"の両方にラベルを付けます。
- マイクロコントローラと積み重ね可能なシールド(図2B)
- マイクロコントローラの上部側のソケットを持つ女性の積み重ね可能なヘッダを半田付けします。マイクロコントローラの底のヘッダからワイヤーを突出クリップ。
- はんだ女性のSDデータロギングシールドの上部側のソケットとスタッカブルヘッダー。シールドの下部にワイヤーを突出しておきます。
- 底部から突出ピンとモーターシールド上に男性のヘッダを半田付けします。
- リアルタイムクロックモジュールに電力を提供するためにSDシールドのスロットにコイン型電池を置き。
- 外部電源ボタン(図2C)
注:ラッチ金属プッシュボタンヘクタール秒5の接続:電源、グラウンド、通常(NC1)閉じ、ノーマルオープン(NO1)、およびコモン(C1)。- 2ピンオスコネクタC1に「A」(赤い線を使用)とグランドを(黒い線を使用)半田付けします。すべての接続を熱収縮。
- +(赤い線を使用)し、NO1(黒い線を使用)に2ピンオスコネクタ「B」を半田付けします。すべての接続を熱収縮。
- フォトインタラプタ(図2D)
- はんだフォトインタラプタ(黒い部分)がボードを脱走します。
- ブレイクアウトボードの前面に4.7Kの抵抗を半田付けします。
- SGLに赤い線PWR、緑色の線にGNDに、白ワイヤー:ブレイクアウトボードの背面にオスの3ピンコネクタ "E"を半田付けします。
- ボードを抜け出すフォトインタラプタの背面にバラ線をトリム。
- ブーストボード(図2E)
- ブースト・ボード上の5VとGNDピンに2ピンメスコネクタ「A」を半田付けします。
- ミリアンペアから黒い線をハンダ付けしますブースト・ボード上の追加のGNDピンへルコネクタ「D」。
- BNC出力ケーブル(別売:図2F)
- (中央ピン、外ピンに黒い線に赤い線)2ピンコネクタBNCケーブルの端子に "C"を半田付けします。
注:アセンブリの場合、2ピンコネクタはBNCプラグのナットを通り抜ける必要があります。私たちは、より小さなコネクタを使用するか、またはそれが収まるようにするためにかみそりの刃でJSTコネクタを下に剃ります。
- (中央ピン、外ピンに黒い線に赤い線)2ピンコネクタBNCケーブルの端子に "C"を半田付けします。
- モーターシールド(図2G)
- で Vにメスコネクタ一緒に「B」とはんだの赤と黒の線材をねじります。
- AREFに次のグランド・ピンメスコネクタ「C」の黒い線をハンダ付けし、そしてこのコネクタの赤い線がピン3に。
- 次の中で Vにアース端子にメスコネクタ「D」の黒い線をハンダ付けします。
- グランド・ピンにメスコネクタ「E」の緑色の線をハンダ付けします次の5V、5Vにこのコネクタ、およびピン2に、このコネクタの白い線の赤い線に。
3.ソフトウェアのアップロード
- マイクロコントローラのプログラミングピンにFTDIブレイクアウトボードを接続し、マイクロUSBケーブルを介してコンピュータにFTDIブレイクアウトボードを接続します。
- IDE(統合開発環境)プログラムを開きます。
- [ツール]> [ボード]ドロップダウンメニューからソフトウェアのアップロードのための正しいマイクロコントローラボードを選択します。
- [ツール]> [プロセッサ]メニューからATMEGA 328(5V、16MHzの)を選択します。
- (現在使用中のどのポートによって異なります)、マイクロコントローラは、ツールを通じて>ポート> COM#1に接続されているポートを選択します。
- (:https://github.com/KravitzLab/fed/tree/master/fed-arduinoで入手可能)ボードにFEDのスケッチをアップロードするには、「アップロード」ボタンをクリックします。
4.ハードウェアアセンブリ
- ステッピングモータであり、motorシールド(図1C及び図3Aおよび3B)
- 3Dはモータが2#6×¼ "板金ネジ( 図1C及び図3A)でマウントし、プリント上に5Vのステッピングモータを固定します。
- モータマウントに回転ディスクを挿入し、しっかりとステッピングモータ軸( 図3B)に取り付けられるように押し下げます。
- 3Dでのねじれはペレットレベラーアームはモーターマウントの穴の上にあることを確認することモータマウント上に食品サイロを印刷しました。
- ベースの背面と前面に配置さの穴に向かって配置さステッパモータと、印刷されたベースのトップに - 上から接続された作品にツイスト(4.1.3 4.1.1ステップ)。
- 各ワイヤの端からステッピングモータ線とストリップ〜2ミリメートルから5ピンコネクタをカット。
- モーターシールドのターミナルブロックコネクタにステッピングモータからの配線を接続します。地面に赤、1モータポート( 例えば 、M1)に、オレンジ、ピンク、およびその他メートルの青と黄色otorポート( 例えば 、M2)。
- 外部電源ボタン
- 電源ボタンからナットを取り外し、ベースの右側にある穴に電源ボタンを挿入します。六角ナットと所定の位置にボタンを固定します。
- フォトインタラプタ(図3C)
- その3Dプリントハウジングにフォトインタラプタを配置します。
注:フォトインタラプタは、内のすべての方法を固定できない場合筐体を加熱するためにヒートガンを使用しています。 - 文字列の3D印刷ベースの前面中央の穴を通してフォトインタラプタ(PWR、GND、およびSGL)から3ピンオスコネクタ「E」。
- 2 1「ナイロンネジと対応するナットでFEDベースにハウジングを固定します。
- その3Dプリントハウジングにフォトインタラプタを配置します。
- BNC出力ケーブル(オプション)
- FEDベースの左側にある穴にBNCコネクタを挿入します。ナットで所定の位置に固定します。
- BNCコネクタを使用しない場合は、3Dプリントプラグで穴を塞ぎます。
- バッテリーとブーストボード( 図3D)
- JST 2ピン接続を介してDC / DC昇圧コンバータモジュールに3.7 Vバッテリーパックを接続します。バッテリーが充電されている場合はブースト・ボード上の青色のLEDが点灯します。
- 内側筐体の実装基板(図3E)
- #4×¼ "鋼板金属ネジを使用して、電源スイッチが直面しているFTDIの接続を持つベースの内側マウントマイクロコントローラ、。
- マイクロコントローラの上にモータシールドとデータロギングシールドを積み重ねます。
- #2×¼ "鋼板金属ネジを用いた場合にブーストボードをねじ込みます。下向きのマイクロSDスロット付きマウントブーストを。FEDは、ケースを開けずに、このポートを介して充電することができます。
- 5つのコネクタを接続し、「「男性は「「女性、「B」、男性に「B」の女性、など
- 3D印刷ベースの内側にバッテリーを置き、カバーを後方にスライドさせてあります。 3D印刷面板上にスライドさせます。
5.検証とデータ収集
注:前FEDシステムの電源をオンに、そうでなければFEDは、ペレットを分配しません、SDカードはSDシールドに挿入されていることを確認。また、(単にパワーブロックの上)のモータシールドの電源ジャンパーが所定の位置にあることを確認します。
- パワープッシュボタンおよび試験装置の機能を備えたFEDシステムの電源をオンにします。
- 電源投入前に20mgの食物ペレットを有する食品サイロを記入してください。
注:電源スイッチは、マイクロコントローラ上のはずのLED、SDシールド、およびモータシールドとして、点灯します。よくにはペレットがない場合は、1を分配する必要があります。 - 食品ウェルから10ペレットと交換ペレットが分配されていることを確認 - 手動5を削除します。
- 電源投入前に20mgの食物ペレットを有する食品サイロを記入してください。
- SDカードを取り出して、データが正しく記録されたことを確認します。データはVAに基づいて命名されたカンマ区切り値(.CSV)で取得する必要がありますコード内riable FILENAME。
- 実験設定、電源オンの内側FEDユニットを配置し、そしてペレットはよく食べ物の中に分配されていることを確認してください。
- データ収集の過程で、それは電源スイッチのLEDライトがオンになっていることを確認することにより正常に動作していることを確認するために毎日のFEDを確認します(これはバッテリーが十分な電荷を有することを示している)、ペレットをよく食品に座っている(示し、ペレット分配に問題が)がないこと。
- データ収集後、SDカードとアクセス.csvファイルを取得します。
注:https://github.com/KravitzLab/fed:食事や給餌のパターンの解析スクリプトはで入手できます。
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
動物の使用を含む検証テストを見直し、国立糖尿病・消化器病・腎臓病研究所で動物実験委員会によって承認されました。ホームケージ送りを測定するためのFEDの使用を実証するために、成体メスC57BL / 6マウス(n = 4) は 、個別12/12時間の明/暗サイクルの下で水と標準的な実験用飼料への随意アクセスで飼育した(に点灯します5:00)。検証テストの5日間、一週間の馴化期間の後、食物ホッパーを除去し、FEDに置き換えます。試験期間の終わりには、FEDのカスタム、自由に利用可能なスクリプトや表計算プログラムを使用して分析した各SDカードからケージ給電データから除去しました。 (上のパネル;ラスタは、単一のペレット検索イベントを示す) 図4A、個々のマウス用ペレット検索に示すように、30分ビン内のすべてのマウス全体の平均ペレット検索(BOttomパネル;線)は平均±SEMを明確に可視化概日リズムと検証テスト期間にわたって連続給紙を、示して示しています。 FEDのデータロギング能力の精度を定量化するために、各FEDシステムは検証試験期間1000のペレットを与えられ、残りのペレットを手動で計数し、SDカードに記録されたデータと比較しました。 FEDは、SDカード( 図4B)に分配したペレットの95.35±1.25%を記録しました。

図1:3D 設計さFEDコンポーネント。組み立てられたFEDの(A)の測定。 (B)組み立てられたFEDで3Dプリント部品の分解図。ディスクを回転(rに(C)完全なペレットホッパーアセンブリ(左)の分解図、ディスク(中央)を回転するステッピングモータの組み立て、食品サイロのアセンブリIGHT)。 (D)だけでなく、ペレットの検出のためのフォトインタラプタを確保するアームを有する食品のデザイン。完全に組み立てられたFEDの(E)写真。 この図の拡大版をご覧になるにはこちらをクリックしてください。

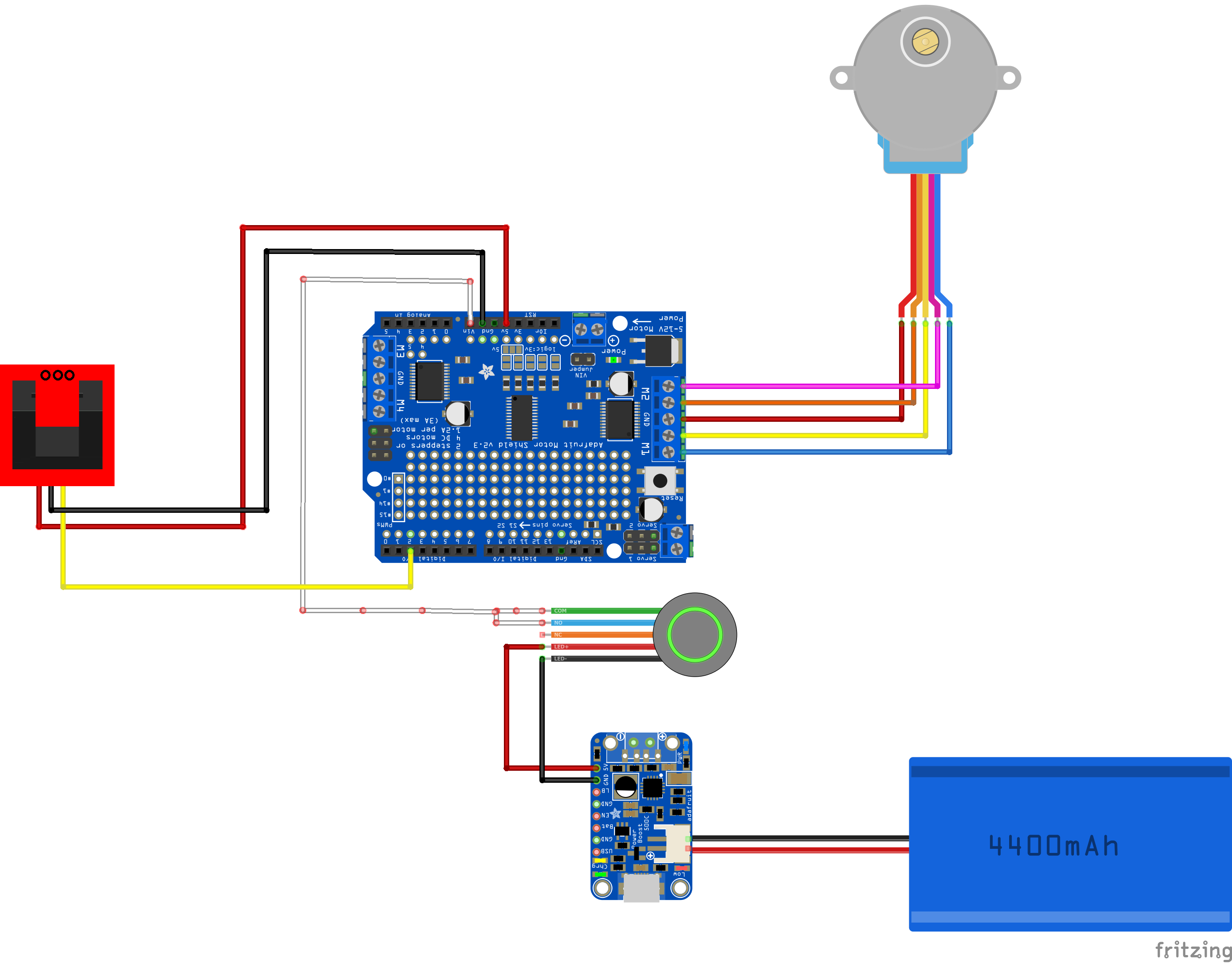
図2:FED 電気部品の配線。 (A)コネクタ(B)マイクロコントローラ、データロギング/ SDシールド、モーターシールド、(C)電源ボタン、(D)フォトインタラプタ(E)ブースト・ボードの配線と組み立て、(F)BNC出力ケーブル、(G)配線モータシールドの。 の拡大版をご覧になるにはこちらをクリックしてください。この図。

図3:FED ハードウェアの組み立て。 (A)取付ステッピングモータ(左)モーターに取り付け、取り付けペレットディスク(右)。 (B)モータシールドにステッピングモータの配線。 3Dにフォトインタラプタを挿入(C)は、ハウジングのプリント。ボードを後押しするために、バッテリの取り付け(D)。 (E)ボードは、FEDのハウジング内に組み立てられました。 この図の拡大版をご覧になるにはこちらをクリックしてください。

図4:FED を介して収集代表的食物摂取データ。 (A)食品摂取データ FED を介して収集し、オープンソースの解析スクリプトを使用して可視化しました。上部パネル:個々のラスタは、個々のマウスを含む行で、単一のペレット検索イベントを示します。底板:行は、マウス全体で食物摂取量の平均値±SEMを示した(n = 4)。ログ内の個々のFED単位の(B)精度は、ペレットを分配しました。色は、図3(a)のラスタに対応しています。 この図の拡大版をご覧になるにはこちらをクリックしてください。

図5:FED のための変更された使用。 (A)は、外部から供給が齧歯類ケージ内の床面積を低減取り付けられました。 (B)前面の設定を変更するには、オペラント訓練のための2つの鼻突くポートの追加を可能にします。ve.com/files/ftp_upload/55098/55098fig5large.jpg "ターゲット=" _空白 ">この図の拡大版をご覧になるにはこちらをクリックしてください。
補足ファイル1:ハードウェアの回路図。 FEDの電子接続を示すグラフィック概略図。 このファイルをダウンロードするにはこちらをクリックしてください。
補足ファイル2:サンプル出力コード。 FEDからの出力コードを示すサンプル.CSVファイル。 このファイルをダウンロードするにはこちらをクリックしてください。
補足ファイル3-6:解析スクリプト。 eating_rate.py、meals.py、meal_bars.py、およびplotmice.py:四つの解析スクリプトはFEDのデータを分析するために設けられています。入力パラメータの説明は提供しています各スクリプトの先頭にコメントセクション中のd。 このファイルをダウンロードするにはこちらをクリックしてください。
Subscription Required. Please recommend JoVE to your librarian.
Discussion
摂食実験装置(FED)は、柔軟な食物摂取監視システムです。ここでは、製造およびマイクロコントローラ上に3Dプリントのハードウェア、電気部品のはんだ付け、およびスケッチのアップロードのアセンブリを含む、デバイスのトラブルシューティングの詳細な手順について説明します。それは慎重プロトコルに記載されているすべての手順に従うことが重要であるが、成功した最終製品を確実にするために、各セクション内の余分な注目に値する重要なステップがあります。 3Dは、ステッピングモータのシャフトにぴったりとフィットし、隣接部分から最小抵抗で回転することができるはずディスクを回転させる印刷しました。ピン接続をはんだ付けする場合、はんだ接合部が余分なはんだを持つことなく、安全であることを確認してください。インストールされているすべての追加のライブラリは、マイクロコントローラにスクリプトをアップロードする前に、正しいディレクトリに配置しなければならないことを確認してください。 FEDの組み立て工程がなくても前に、容易に達成されているタスクが含まれます3D印刷やエレクトロニクスの経験。
FEDにはいくつかの制限があります。まず、各FEDは、データを記録し、保存するために内部のSDカードを使用しています。 SDカードは、多くのFEDからデータを追跡し、保存するために面倒な手段とすることができます。私たちは、この問題を軽減するために無線データ転送を模索しているが、FEDの現在の反復は、SDカード上のローカルストレージに依存しています。第二に、〜時間FEDの5%が1つではなく、2つのペレットを分配します。ペレットジャムをカウントするために十分な頻度で私たちの手で発生していないが、我々はそれらを完全に排除できないとして、この可能性は厳密に監視する必要があります。ユーザーは毎日FEDの機能をチェックせずに彼らの唯一の食料源としてFEDをマウスに残すべきではありません。これらの制限にもかかわらず、我々はFEDのエラー率が最も調査研究のために許容可能であると考えています。それは、将来の仕事に、我々はさらに、これらのエラーを減少させるように努める、と述べました。最後に、3次元印刷の許容範囲は、特定の3次元プリンター及び材料に応じて変えることができます。として私たちが提供するような、3D設計ファイルは、または他の材料との3Dプリンタの他のモデルに印刷するために微調整する必要があるかもしれません。役立つTipsとして、我々は、ヒートガンを微調整するための3D印刷部分を柔らかくするために印刷した後に使用することができることを見出しました。
単一FEDは約$ 350のために組み立てることができます。この価格のうち、我々はPLA材料のうち商業3Dプリントのために〜$ 200と、電子部品を購入するための〜$ 150推定します。 3Dプリントコストを大幅に品質と材料に依存して変化します。ユーザが自分の部分を印刷する場合は、かなりこのコストを低減することができます。これは高価になるが、FEDはまた、印刷または、ステンレス鋼やアルミニウムのような、より耐久性のある材料から機械加工することができました。
私たちは、オープンソースのプラットフォームとプログラム可能な回路基板上のマイクロコントローラとFEDを構築することにしました。それが持っているように、このために、私たちは、オープンソースのマイクロコントローラ( 材料の表を参照)を選択しました低消費電力。しかし、我々のコードは十分な入力/出力ピンを持つ任意のボードで動作するはずです。マイコンボードを変更する可能性の高いコードに若干の変更が必要になります。私たちはオンラインのすべてのデザインファイルとコードを提供し、私たちのデザインは、他のマイコンボードの使用を含め、自分のニーズに合わせてFEDを変更する柔軟性を持つ研究者を提供するために、オープンソースです。
科学的研究のためのオープンソースのハードウェアに向かって成長している傾向があります。様々なグループはOpenControl、行動タスク7時のビデオ追跡動物のためのソフトウェアを含む、神経科学研究のためのオープンソース・デバイスを作りました。 ROBucket、液体成果配信8用のArduinoベースのオペラントチャンバー; ELOPTA、ペレット成果配信9用のPICmicroベースのオペラントのデバイス。そして、BEEtag、マルハナバチ10用の画像ベースの追跡システム。 FEDは、そのユニークなフォームファクタおよびlでこれらを補完しますOWコスト。 FEDのためのキーの目的は、オープンソースにすることでした。オープンソースハードウェアは、研究者が(例えば寸法を変更するために)設計に微調整を行うことができますが、ユーザーはハードウェアの機能を拡張するために大幅な変更を行う場合に特に強力です。例えば、外部の両方がFEDを保護し、ケージ( 図5A)内の床面積を増加させ、ケージ、上に装着するためのFEDの設計を変更することはかなり容易です。さらに、当社は、オペラント訓練のためによく供給のそれぞれの側にノーズポークのための部屋を持つようにFEDを設計し、そして成功した軽微な設計変更( 図5B)でこれらを実装しています。当社は、当社ウェブサイト(https://github.com/KravitzLab/fed)、我々はまた、研究コミュニティからの他のそのような改良をホストしていることを楽しみにしてどこにそのような動向を掲載します。
Subscription Required. Please recommend JoVE to your librarian.
Acknowledgments
この作品は、国立衛生研究所(NIH)、糖尿病および消化器の国立研究所腎臓病の学内研究プログラム(NIDDK)によってサポートされていました。私たちは、3Dプリントの支援のための計装にNIH節およびNIHライブラリに感謝します。
Materials
| Name | Company | Catalog Number | Comments |
| Electronics | |||
| Adafruit Motor/Stepper/Servo Shield for Arduino v2 Kit - v2.3 | Adafruit | 1438 | Use of other motor shields has not been tested and will require changes to the code |
| Adafruit Assembled Data Logging shield for Arduino | Adafruit | 1141 | Use of other data logging shields has not been tested and will require changes to the code |
| PowerBoost 500 Charger | Adafruit | 1944 | Other voltge regulator boards have not been tested, but should work if they have similar specifications |
| FTDI Friend + extras - v1.0 | Adafruit | 284 | Any FTDI-USB connection will work |
| Small Reduction Stepper Motor - 5VDC 32-Step 1/16 Gearing | Adafruit | 858 | Use of other stepper motors has not been tested |
| Arduino Pro 328 - 5V/16MHz | SparkFun | DEV-10915 | Other Arduino boards should work, although may require changes to the code |
| Photo Interrupter - GP1A57HRJ00F | SparkFun | SEN-09299 | Other photointerrupters will work, but may require changes to the 3D design |
| SparkFun Photo Interrupter Breakout Board - GP1A57HRJ00F | SparkFun | BOB-09322 | Other photointerrupters will work, but may require changes to the 3D design |
| Connectors, screws, and miscellaneous items | |||
| Shield stacking headers for Arduino (R3 Compatible) | Adafruit | 85 | Any stacking header that says Arduiono R3 compatible will work |
| Multi-Colored Heat Shrink Pack - 3/32" + 1/8" + 3/16" | Adafruit | 1649 | Any heatshrink will work |
| Hook-up Wire Spool Set - 22AWG Solid Core - 6x25ft | Adafruit | 1311 | Any wire will work |
| Lithium Ion Battery Pack - 3.7V 4400 mAh | Adafruit | 354 | Any 3.7 V Lithium battery with a JST connector will work |
| SD/MicroSD Memory Card (8GB SDHC) | Adafruit | 1294 | Any SD card will work |
| 50 Ohm BNC Bulkhead Jack (3/8" D-Hole) | L-com | BAC70A | Any BNC bulkhead will work |
| Type 316 Stainless Steel Pan Head Phillips Sheet metal screw, No 6 size, 1/4" Length | McMaster-Carr | 90184A120 | Any screws of this specification will work |
| Type 316 Stainless Steel Pan Head Phillips Sheet metal screw, No 2 size, 1/4" Length | McMaster-Carr | 91735A102 | Any screws of this specification will work |
| Nylon 100 Degree Flat Head Slotted Machine Screw, 4-40 Thread, 1" Length | McMaster-Carr | 90241A253 | Any screws of this specification will work |
| Nylon Hex Nut, 4-40 Thread Size | McMaster-Carr | 94812A200 | Any nut of this specification will work |
| 2 Pin JST M F Connector 200 mm 22AWG Wire Cable | NewEgg | 9SIA27C3FY2876 | Any 2 pin connector will work for this connection |
| Metal Pushbutton - Latching (16 mm, Red) | SparkFun | COM-11971 | Any push button or switch will work |
| Resistor Kit - 1/4 W | SparkFun | COM-10969 | Any 1/4 W resistors will work |
References
- Ellacott, K. L., Morton, G. J., Woods, S. C., Tso, P., Schwartz, M. W. Assessment of feeding behavior in laboratory mice. Cell Metab. 12 (1), 10-17 (2010).
- Betley, J. N., et al. Neurons for hunger and thirst transmit a negative-valence teaching signal. Nature. 521 (7551), 180-185 (2015).
- van den Heuvel, J. K., et al. Neuropeptide Y activity in the nucleus accumbens modulates feeding behavior and neuronal activity. Biol Psychiatry. 77 (7), 633-641 (2015).
- Cone, J. J., Roitman, J. D., Roitman, M. F. Ghrelin regulates phasic dopamine and nucleus accumbens signaling evoked by food-predictive stimuli. J Neurochem. 133 (6), 844-856 (2015).
- Ulman, E. A., Compton, D., Kochanek, J. Measuring food and water intake in rats and mice. ALN Mag. , 17-20 (2008).
- Nguyen, K. P., O'Neal, T. J., Bolonduro, O. A., White, E., Kravitz, A. V. Feeding Experimentation Device (FED): A flexible open-source device for measuring feeding behavior. J Neurosci Methods. 267, 108-114 (2016).
- Aguiar, P., Mendonca, L., Galhardo, V. OpenControl: a free opensource software for video tracking and automated control of behavioral mazes. J Neurosci Methods. 166 (1), 66-72 (2007).
- Devarakonda, K., Nguyen, K. P., Kravitz, A. V. ROBucket: A low cost operant chamber based on the Arduino microcontroller. Behav Res Methods. 48 (2), 503-509 (2016).
- Hoffman, A. M., Song, J., Tuttle, E. M. ELOPTA: a novel microcontroller-based operant device. Behav Res Methods. 39 (4), 776-782 (2007).
- Crall, J. D., Gravish, N., Mountcastle, A. M., Combes, S. A. BEEtag: A Low-Cost, Image-Based Tracking System for the Study of Animal Behavior and Locomotion. PLoS One. 10 (9), (2015).

{kind=link}
{kind=link}