נתונים אפידמיולוגיים מצביעים על כך שברחבי העולם ישנם ~17 מיליון מקרים חדשים של שבץ מוחי מדי שנה, עם עלייה בהיארעות במדינות בעלות הכנסה נמוכה ובינונית1. מספר המקרים החדשים צפוי לעלות ל-77 מיליון עד שנת 20302. פגיעה מוטורית עקב שבץ מוחי משפיעה לעיתים קרובות על ניידות המטופל והשתתפותו בפעילויות יומיומיות, ותורמת לאיכות חיים נמוכה. שיקום מוטורי מסורתי כולל טיפול ידני, אך בעשורים האחרונים פותחו מערכות רובוטיות לשיקום. מערכות אלה יכולות לספק טיפול בעצימות גבוהה, במינון, בכימות, באמינות, בחזרתיות ובגמישות3 והראו פוטנציאל כטיפולי שיקום יעילים הן לחולי שבץ אקוטי והן לחולי שבץ כרוני 4,5,6. בנוסף למתן הטיפול, מערכות רובוטיות לשיקום יכולות לשמש ככלי הערכה מכיוון שהן יכולות להיות מצוידות בחיישנים שיכולים למדוד את תנועת המטופל נתונים קינמטיים/קינטיים 7,8. עבור שיקום מוטורי בגפיים העליונות, נתונים אלה לא רק הוכחו כשימושיים להערכת רמת ההתאוששות המוטורית של המטופל המתעוררת על ידי טיפול רובוטי ושימשו ככלי משלים להערכות קליניות מסורתיות 9,10, אלא הם גם תרמו לקידום ההבנה של תהליך ההתאוששות המוטורית משבץ11, 12 וכן בקרה עצבית של תנועה ולמידה מוטורית במקצועות בריאים 3,13,14. כתוצאה מכך, ממצאים אלה היוו בסיס להעצמת טיפולי השיקום15 .
במהלך שני העשורים האחרונים, הוצעו מכשירים רובוטיים רבים לשיקום נוירולוגי בגפיים התחתונות, החל משלד חיצוני התומך במשקל הגוף של המטופל במהלך הליכה (למשל, מעל הליכון, כגון Lokomat16) ועד מערכות רובוטיות נייחות המאפשרות למטופל לאמן את הקרסול, הברך או כף הרגל ללא הליכה (כגון Rutgers Ankle17, רובוט שיקום הקרסול בעל הביצועים הגבוהים18, ורובוט שיקום הקרסול/כף הרגל19 של מכון גוואנגז’ו למדע וטכנולוגיה (GIST) או אורתוזות כף רגל פעילות שהן שלד חיצוני מופעל הנלבש על ידי המטופל כדי ללכת מעל הקרקע או מעל הליכון (כגון Powered Gait Orthosis20 ו- MIT Anklebot21). ראה 22,23,4 לסקירה על רובוטים לשיקום גפיים תחתונות.
תוצאות מחקרים קליניים של מכשירים רובוטיים לשיקום גפיים תחתונות בחולי שבץ היו מעודדות והראו כי מערכות אלה עשויות לשפר את טווח התנועה של המפרקים (ROM), כוח השרירים או ההליכה, בהתאם למכשיר הספציפי ולפרוטוקול הקליני (ראה 24,25 לסקירה על יעילותם של רובוטים בגפיים התחתונות לשיקום). בעוד שהוצע כי טיפול בעזרת רובוט מקדם שינויים נוירופלסטיים, אשר בסופו של דבר מביאים לשיפור ביכולות המוטוריות26, כיצד תהליך ההתאוששות המוטורית משבץ מתרחש בדיוק ואילו פרוטוקולי אימון רובוטיים מייעלים את תהליך ההתאוששות של יכולות מוטוריות בגפיים התחתונות, עדיין לא ברור ברובו . למעשה, קיים פער משמעותי והולך בין הפיתוח הגובר של רובוטים שיקומיים (בין אם על ידי חוקרים אקדמיים ובין אם על ידי גורמים מסחריים) לבין ההבנה המוגבלת של המנגנונים הנוירופיזיולוגיים העומדים בבסיס ההתאוששות המוטורית4. מדידות של קינמטיקה תנועתית או מומנטים משותפים שנלקחו באמצעות חיישנים משובצים תרמו לתיאור כמותי של שינויים התנהגותיים מוטוריים המתרחשים כאשר חולים משחזרים יכולות מוטוריות בגפיים התחתונות 27,28,29, וממלאים חלקית פער זה. עם זאת, הקורלציות העצביות העומדות בבסיס שינויים כאלה נחקרו פחות. זאת בשל מספר סיבות.
הדמיה תפקודית של המוח גוזלת זמן ולפעמים קשה להשלים אותה בהקשר של ניסויים קליניים, אשר לעתים קרובות דורשים שמירה על עומס מטופלים מינימלי כדי למקסם את הסבירות להיענות המטופל למחקר. זה נכון במיוחד עבור אנשים שסבלו משבץ, בהתחשב בעובדה כי עייפות לאחר שבץ וחולשת שרירים נצפים לעתים קרובות30. כמו כן, שיטות דימות המבוססות על שדות מגנטיים, כגון דימות תהודה מגנטית תפקודי (fMRI), דורשות הן חומרה של המטופל והן של חומרה רובוטית כדי להיות בטוחים למגנט.
בין שיטות הדימות הלא פולשניות, ספקטרוסקופיה תפקודית של אינפרא אדום קרוב (fNIRS) היא טכניקת הדמיה המתאימה במיוחד להערכת אזורים של הפעלת המוח בנבדקים שעברו טיפול רובוטי. בדומה ל-fMRI, fNIRS מודד חמצון/דה-אוקסיגנציה בדם במוח. עם זאת, בניגוד ל-fMRI, fNIRS תואם באופן מלא לחומרה רובוטית, ולעתים קרובות הוא נייד, אפילו שמיש ליד המיטה. כמו כן, fNIRS יש עלות נמוכה ופחות רגישות לתנועהartifacts 31,32,33.
למרות יתרונותיו הברורים והשימוש הנרחב בו במסגרות קליניות רבות מאז הצגתו לראשונה בסוף שנות ה -7034, רק מחקרים מעטים השתמשו ב- fNIRS כדי לכמת את הפעלת המוח הקשורה לתנועות גפיים תחתונות והתאוששות מוטורית של שבץ. מחקרי FNIRS שמטרתם להבהיר מנגנונים של שליטה עצבית בתנועה ו / או מנגנונים או הערכה של התאוששות מוטורית משבץ חקרו בעיקר תנועות מפרק יחיד (למשל, dorsiflexion, כיפוף פלנטרי או תנועות הארכת ברך 35,36,37), הליכה 38,39,40,41,42,43, או רכיבה על אופניים44. ראה45 לסקירה. באופן דומה, מחקרי fNIRS על טיפול בעזרת רובוט לגפה התחתונה התמקדו בעיקר בשיקום הליכה בעזרת רובוט; ראה46 לסקירה. מספר מחקרים התמקדו בשימוש ב-fNIRS כחלק ממערכת ממשק מוח-מחשב (BCI) כדי להפיק אותות בקרה עבור התקנים רובוטיים47,48; בעוד שתחום מחקר זה מסתמך גם על עיבוד אותות fNIRS, מטרתו שונה ומתמקדת בעיקר בפענוח כוונות המטופלים (למשל, חולים עם מוגבלויות מוטוריות חמורות).
מחקר הפיילוט המוצג כאן הוא חלק ממאמץ ראשוני לחקור את ההשפעות של מערכת רובוטית לשיקום גפיים תחתונות. הרובוט יכול לספק שיקום מוכוון מטרה בגפיים התחתונות הכולל אימון בתנועות יומיומיות מרובות מפרקים, כמו גם לספק טיפול למפרקים בודדים (למשל, ברך או קרסול) של הגפה התחתונה (כלומר, ליישם תוכנית שיקום מלמטה למעלה).
מטרת המחקר הייתה לבדוק את ההיתכנות של פרוטוקול ניסויי שדרש רכישת נתוני fNIRS במהלך ביצוע תנועות הצבעה רב-מפרקיות בגפיים התחתונות. משך תקופת איסוף הנתונים במחקר זה, שהוגבל ל-6 דקות, קצר יותר מפרוטוקולי fNIRS טיפוסיים. זו הייתה בחירה מכוונת שנעשתה במטרה לשפר את המעשיות והישימות הקלינית של מחקר זה, במיוחד בחולים עם ניידות או כוח מוגבלים. זיהוי מתאמי fNIRS של תנועות רב-מפרקים מורכבות כאלה וקבלת תובנות לגבי האופן שבו הפעלת המוח מווסתת על ידי סיוע רובוטי היו גם הם נקודות עניין. לשם כך נערכו שני מפגשי ניסויים עם אותם משתתפים: אחד ללא סיוע רובוטי ואחד בסיוע רובוט. לבסוף, חשוב לציין כי מחקר זה התמקד בנושאים בריאים על מנת לבסס בסיס למחקר עתידי במונחים של היתכנות פרוטוקול רישום והערכה של הפעלת המוח במהלך תנועות הממוקדות על ידי טיפול רובוטי.
מכשיר
רובוט נייד שתוכנן לספק שיקום גפיים תחתונות (ראו איור 1) שימש לביצוע הניסויים שלנו. לרובוט יש סביבת עבודה נגישה בתלת ממד והוא קומפקטי וקל משקלו כ-35 ליברות, מה שמקל על שינוע והתקנה.
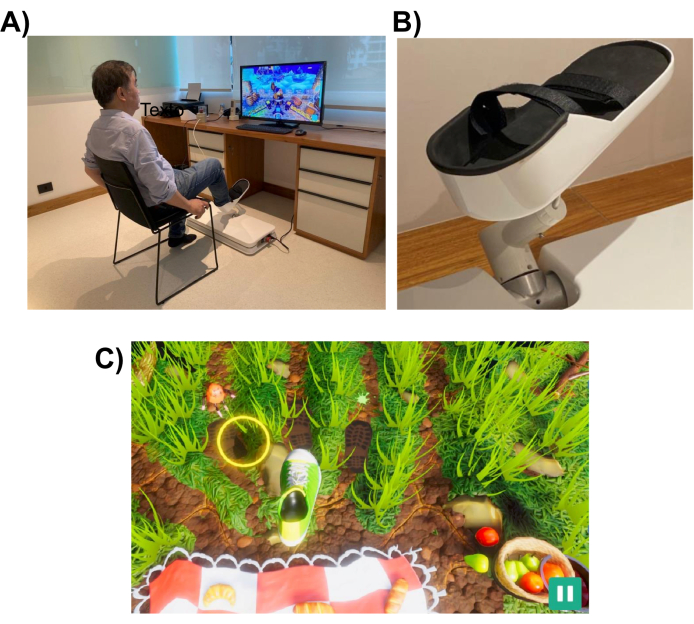
איור 1: מערך ניסויי. (A) המערכת הרובוטית (המותקנת על הרצפה) המיועדת לגפה התחתונה. מתנדב נראה משתמש בממשק ברגל ימין. (B) מבנה תמיכה לכף הרגל של הנבדק המאפשר חיבור למערכת הרובוטית. (C) צילום מסך של משחק הפיקניק. מטרת המשחק היא להזיז את כף הרגל (נעל ירוקה ולבנה) למטרה (עיגול צהוב). אנא לחץ כאן כדי להציג גרסה גדולה יותר של איור זה.
המערכת הרובוטית נועדה לסייע למטופל לבצע תנועות גפיים תחתונות הדומות לאלו המבוצעות במשימות יומיומיות, כגון הצבעה או בעיטה. הוא משתמש במשחקי מציאות מדומה אינטראקטיביים, אשר מוצגים על צג מחשב או מסך טלוויזיה הממוקם מול המכשיר הרובוטי (ראו איור 1). אפקט קצה הרובוט מחובר לגפה התחתונה של המטופל (למשל, קרסול), ומיקומו ממופה למיקום של סמן על המסך. משחק טיפוסי מראה את מטרות התנועה של המטופל (למשל, האובייקט שאליו יש להצביע או היכן לבעוט בכדור).
כדי להשלים את משימת התנועה, הרובוט עשוי לסייע למטופל ברמת סיוע שיכולה לנוע בין סיוע מלא לאפס. רמת הסיוע הרובוטי נבחרת בתחילת כל מפגש שיקום בהתאם לרמת הליקוי המוטורי של המטופל. התנועות המבוצעות על ידי הנבדק משמשות את המשחק כדי לדרג את ביצועי המטופל ולספק לו משוב על ביצועיו (למשל, ROM, מספר תנועות ורמת סיוע רובוטי). המשחקים נועדו להיות אינטראקטיביים ומבדרים כדי לשמור על עניין ותשומת לב של המטופל. במחקר הזה, המשתתפים שיחקו את “משחק הפיקניק”, שבו השחקן היה צריך לעצור את החרקים מלהגיע למגבת ולגנוב את האוכל (ראו איור 1, לוח תחתון, לצילום מסך).
איסוף הנתונים בוצע באמצעות מערכת איסוף fNIRS ניידת עם שני אופטודות שונות של גלים רציפים (760 ננומטר ו-850 ננומטר), 8 מקורות LED בעלי קצה כפול ו-8 גלאים פעילים בעלי קצה כפול. האותות נרכשו באמצעות קצב דגימה של 10.17 הרץ. מחשב נייד שימש לאופטימיזציה של כיול והקלטת אותות באמצעות רשת Wi-Fi שנוצרה על ידי מערכת fNIRS.
כובע שימש להחזקת האופטודות במקומות שנקבעו מראש. המקורות והגלאים הוצבו על פי מערכת EEG בינלאומית 10-10 בפיזור מרחבי רשת. כל תעלת fNIRS הוגדרה על ידי זוג גלאי מקור עם מרחקים בין-אופטודים של כ-30 מ”מ. האופטודות מוקמו מעל האזורים המוטוריים, הקדם-מוטוריים והמוטוריים המשלימים במקומות שמוצגים באיור 2. מספר הערוצים הכולל היה 28, כאשר 8 היו ערוצים למרחקים קצרים שהוצמדו לכל מקור באמצעות מתאם סיב אופטי לגלאי יחיד. בהתחשב בהגדרת הריבוב של החומרה, ניתן לרכוש מידע למרחקים קצרים מכל המקורות באמצעות גלאי אחד בלבד.
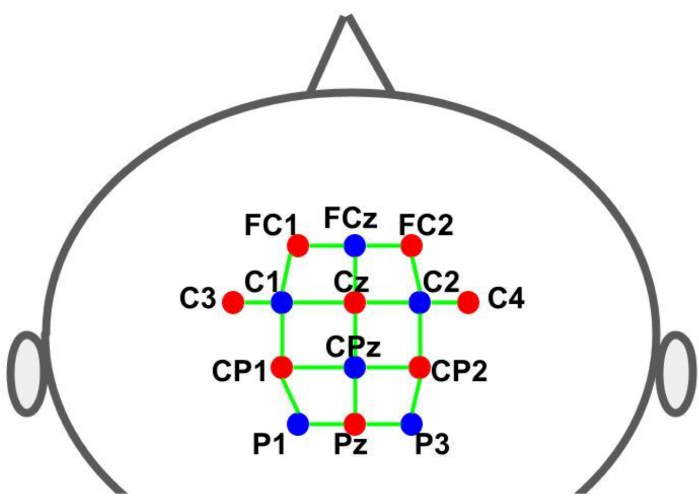
איור 2: פריסת מונטאז’ באמצעות מערכת EEG 10-10. האותיות והמספרים מציינים את מיקומי המקור/הגלאי. הנקודות האדומות והכחולות מייצגות את אופטודות המקור והגלאי, בהתאמה. הקווים הירוקים מייצגים את ערוצי fNIRS המורכבים מזוגות מקור וגלאים. אנא לחץ כאן כדי להציג גרסה גדולה יותר של איור זה.
תכנון ניסיוני
הניסוי נערך בשני תנאי ניסוי שונים, הנבדלים זה מזה ברמת הסיוע שמספק הרובוט לתנועות הנבדק. בתנאי הראשון, הרובוט תוכנת לא לספק כל סיוע לתנועות הנבדק, ואילו בתנאי השני, הרובוט שלט בתנועות הרגליים והרגליים של הנבדק (תנועה בעזרת רובוט).
כל ניסוי עקב אחר פרדיגמת תכנון בלוקים הכוללת מחזורים מתחלפים של משימה מוטורית (משחק המשחק – 30 שניות) ומנוחה (30 שניות), כפי שמודגם באיור 3. ההתחלה והסיום של כל שלב (משחק/משחק או מנוחה) אותתו חזותית לנבדק דרך מסך המחשב. במהלך שלב המנוחה, הוצגה הודעה המציינת הפסקה. כל מחזור (משחק/משחק + מנוחה) נמשך 60 שניות וחזר על עצמו שש פעמים, והתוצאה הייתה זמן ריצה כולל של 360 שניות (6 דקות).
המשתתפים שיחקו ב”משחק פיקניק”, שבו המטרה הייתה למנוע מחרקים להגיע למגבת ולגנוב מזון. משחק זה כלל רצף של תנועות גפיים תחתונות, החל מיעד ביתי מוגדר (מיקום התחלתי) ונמשך לעבר אחת משלוש מטרות חיצוניות לפני החזרה למטרה הביתית. על המסך, המטרות החיצוניות הוצגו חזותית כחרקים נעים מונפשים, שהמשתתפים היו צריכים להגיע אליהם ולדרוך עליהם. היו שלוש מטרות חיצוניות, שכל אחת מהן הוצגה באופן אקראי מספר שווה של פעמים, לצד יעד בית משותף לכל תנועה. המרחק שכף הרגל הייתה צריכה לעבור מהמטרה הביתית למיקום המטרות החיצוניות יצר קשת, שגודלה כ-26 ס”מ. המשימה המוטורית דרשה ביצוע תנועות רב-מפרקיות, הדורשות תיאום בין כיפוף/הארכת הברך, כיפוף פלנטרי ותנועות דורסיפלקסיה.
הקלטות הנתונים fNIRS סונכרנו עם הגירויים החזותיים שהציג המשחק לנבדק באמצעות פולס טרנזיסטור-טרנזיסטור-לוגיקה (TTL) שנוצר על ידי הרובוט. פולסים נוצרו בתחילת כל שלב (משחק/משחק ומנוחה). לפיכך, כל בקרת התזמון בוצעה על ידי המשחק, שסיפק רמזים חזותיים (מטרות) למשתתף להתחיל כל תנועה, שלח אותות TTL למערכת fNIRS כדי לסמן את הקלטות הפעילות המוחית, ואם נדרש על ידי הניסוי, שלח אותות למערכת הבקרה הרובוטית כדי ליזום סיוע בתנועה.
