Epidemiyolojik veriler, dünya çapında her yıl ~ 17 milyon yeni inme vakası olduğunu ve düşük ve orta gelirli ülkelerde görülme sıklığında bir artış olduğunu göstermektedir1. Yeni vaka sayısının 2030 yılına kadar 77 milyona çıkacağı tahmin edilmektedir2. İnmeye bağlı motor bozukluk genellikle hastanın hareketliliğini ve günlük yaşam aktivitelerine katılımını etkileyerek düşük yaşam kalitesine katkıda bulunur. Geleneksel motor rehabilitasyon manuel terapiyi içerir, ancak son birkaç on yılda rehabilitasyon için robotik sistemler geliştirilmiştir. Bu sistemler yüksek yoğunlukta, dozda, ölçülebilirlikte, güvenilirlikte, tekrarlanabilirlikte ve esnekliktetedavi sağlayabilir 3 ve hem akut hem de kronik inme hastaları için etkili rehabilitasyon tedavileri olarak potansiyel göstermiştir 4,5,6. Rehabilitasyon için robotik sistemler, tedavi sunmanın yanı sıra, hasta hareket kinematik/kinetik verilerini ölçebilen sensörlerle donatılabildikleri için değerlendirme araçları olarak kullanılabilir 7,8. Üst ekstremite motor rehabilitasyonu için, bu tür verilerin sadece robotik terapi ile ortaya çıkan hastanın motor iyileşme düzeyini değerlendirmek için yararlı olduğu kanıtlanmakla kalmamıştır ve geleneksel klinik değerlendirmelere ek bir araç olarak hizmet etmiştir 9,10, aynı zamanda inme11’den motor iyileşme sürecinin anlaşılmasına da katkıda bulunmuştur. 12 sağlıklı deneklerde hareket ve motor öğrenmenin sinirsel kontrolünün yanı sıra 3,13,14. Sonuç olarak, bu bulgular rehabilitasyon tedavilerinin geliştirilmesi için bir temel oluşturmuştur15.
Son yirmi yılda, alt ekstremite nörorehabilitasyonu için, yürüme sırasında hastanın vücut ağırlığını destekleyen dış iskeletlerden (örneğin, Lokomat16 gibi bir koşu bandı üzerinden) hastanın ayak bileği, diz veya ayağını yürümeden egzersiz yapmasına izin veren sabit robotik sistemlere (Rutgers Ankle17 gibi) kadar birçok robotik cihaz önerilmiştir. Yüksek Performanslı Ayak Bileği Rehabilitasyon Robotu18 ve Gwangju Bilim ve Teknoloji Enstitüsü (GIST) ayak bileği/ayak rehabilitasyon robotu19) veya hasta tarafından yerde veya bir koşu bandı üzerinde yürümek için giyilen tahrikli dış iskeletler olan aktif ayak ortezleri (Motorlu Yürüyüş Ortezi20 ve MIT Ayak Bileği Botu21 gibi). Alt ekstremite rehabilitasyonu için robotlar hakkında bir inceleme için 22,23,4’e bakın.
İnme hastalarında alt ekstremite rehabilitasyonu için robotik cihazların klinik çalışmalarının sonuçları cesaret verici olmuştur ve bu sistemlerin, spesifik cihaza ve klinik protokole bağlı olarak eklemlerin Hareket Açıklığını (ROM), kas kuvvetini veya yürüyüşünü iyileştirebileceğini göstermiştir (rehabilitasyon için alt ekstremite robotlarının etkinliği hakkında bir inceleme için bkz. 24,25). Robot destekli terapinin nöroplastik değişiklikleri teşvik ettiği ve sonuçta motor yeteneklerin gelişmesiyle sonuçlandığıvarsayılmış olsa da 26, inmeden motor iyileşme sürecinin tam olarak nasıl gerçekleştiği ve hangi robotik eğitim protokollerinin alt ekstremite motor yeteneklerinin iyileşme sürecini optimize ettiği çoğunlukla belirsizliğini korumaktadır. Aslında, rehabilitasyon robotlarının artan gelişimi (akademik araştırmacılar veya ticari kuruluşlar tarafından) ile motor iyileşmenin altında yatan nörofizyolojik mekanizmaların sınırlı anlaşılması arasında önemli ve artan bir eşitsizlik vardır4. Gömülü sensörlerle alınan hareket kinematiği veya eklem torklarının ölçümleri, hastalar alt ekstremite motor yeteneklerini geri kazanırken ortaya çıkan motor davranış değişikliklerini nicel olarak tanımlamaya katkıda bulunmuştur 27,28,29 ve bu boşluğu kısmen doldurmuştur. Bununla birlikte, bu tür değişikliklerin altında yatan nöral korelasyonlar daha az araştırılmıştır. Bunun birkaç nedeni var.
Beyin fonksiyonel görüntüleme zaman alıcıdır ve bazen klinik çalışmalar bağlamında tamamlanması zordur, bu da hastanın çalışmaya uyma olasılığını en üst düzeye çıkarmak için genellikle hasta yükünü minimumda tutmayı gerektirir. Bu, inme sonrası yorgunluk ve kas güçsüzlüğünün sıklıkla gözlendiği gerçeği göz önüne alındığında, özellikle felç geçirmiş bireyler için geçerlidir30. Ayrıca, fonksiyonel Manyetik Rezonans Görüntüleme (fMRI) gibi manyetik alanlara dayalı görüntüleme yöntemleri, hem hasta hem de robotik donanımın mıknatıs açısından güvenli olmasını gerektirir.
Non-invaziv görüntüleme yöntemleri arasında, fonksiyonel Yakın Kızılötesi Spektroskopisi (fNIRS), robotik tedavi gören deneklerde beyin aktivasyon alanlarını değerlendirmek için özellikle uygun bir görüntüleme tekniğidir. fMRI’ya benzer şekilde, fNIRS beyindeki kan oksijenasyonunu / oksijensizmesini ölçer. Bununla birlikte, fMRI’dan farklı olarak, fNIRS robotik donanımla tamamen uyumludur ve genellikle taşınabilir, hatta yatak başında bile kullanılabilir. Ayrıca, fNIRS düşük maliyetlidir ve hareket artefaktlarına karşı daha az duyarlılığasahiptir 31,32,33.
70’lerin sonlarında ilk kez piyasaya sürülmesinden bu yana birçok klinik ortamda açık avantajlarına ve yaygın kullanımınarağmen34, sadece birkaç çalışma, alt ekstremite hareketleri ve inme motor iyileşmesi ile ilişkili beyin aktivasyonunu ölçmek için fNIRS’yi kullanmıştır. Hareketin nöral kontrolünün mekanizmalarını ve/veya mekanizmalarını aydınlatmayı veya inmeden motor iyileşmenin değerlendirilmesini amaçlayan FNIRS çalışmaları çoğunlukla tek eklem hareketlerini araştırmıştır (örneğin, dorsifleksiyon, plantar fleksiyon veya diz ekstansiyon hareketleri 35,36,37), yürüme 38,39,40,41,42,43 veya bisiklete binme44. İnceleme için45’e bakın. Benzer şekilde, alt ekstremite için robot yardımlı terapi üzerine yapılan fNIRS çalışmaları çoğunlukla robot yardımlı yürüyüş rehabilitasyonuna odaklanmıştır; İnceleme için46’ya bakın. Birkaç çalışma, robotik cihazlar için kontrol sinyalleri elde etmek için Beyin-Bilgisayar Arayüzü (BCI) sisteminin bir parçası olarak fNIRS’in kullanılmasına odaklanmıştır47,48; Bu araştırma alanı aynı zamanda fNIRS sinyallerinin işlenmesine de dayanırken, amacı farklıdır ve esas olarak hasta niyetlerinin (örneğin, ciddi motor engelli hastalar) kodunu çözmeye odaklanmıştır.
Burada sunulan pilot çalışma, alt ekstremite rehabilitasyonu için robotik bir sistemin etkilerini araştırmaya yönelik ilk çabanın bir parçasıdır. Robot, günlük çok eklemli hareketlerde eğitimi içeren hedef odaklı alt ekstremite rehabilitasyonu sağlayabilir ve alt ekstremitenin tek eklemlerine (örneğin diz veya ayak bileği) terapi sağlayabilir (yani, aşağıdan yukarıya bir rehabilitasyon programı uygulayabilir).
Çalışma, alt ekstremite, çok eklemli işaretleme hareketlerinin gerçekleştirilmesi sırasında fNIRS verilerinin elde edilmesini gerektiren deneysel bir protokolün fizibilitesini araştırmayı amaçladı. 6 dakika ile sınırlı olan bu çalışmada veri toplama süresi tipik fNIRS protokollerine göre daha kısadır. Bu, özellikle sınırlı hareket kabiliyeti veya gücü olan hastalarda, bu araştırmanın pratikliğini ve klinik uygulanabilirliğini arttırmak amacıyla yapılan kasıtlı bir seçimdi. Bu tür karmaşık çok eklemli hareketlerin fNIRS korelasyonlarını belirlemek ve beyin aktivasyonunun robot yardımı ile nasıl modüle edildiğine dair içgörüler elde etmek de ilgi çekici noktalardı. Bu amaçla, aynı katılımcılarla iki deney seansı gerçekleştirildi: biri robot yardımı olmadan, diğeri robot yardımıyla. Son olarak, bu çalışmanın, protokol fizibilitesinin kaydedilmesi ve robotik terapi ile hedeflenen hareketler sırasında beyin aktivasyonunun değerlendirilmesi açısından gelecekteki araştırmalara temel oluşturması açısından sağlıklı deneklere odaklandığını belirtmek önemlidir.
Cihaz
Deneylerimizi yürütmek için alt ekstremite rehabilitasyonu sağlamak üzere tasarlanmış taşınabilir bir robot (bkz. Şekil 1) kullanıldı. Robot, 3D erişilebilir bir çalışma alanına sahiptir ve kompakt ve hafiftir, yaklaşık 35 lb ağırlığındadır, bu da taşımayı ve kurmayı kolaylaştırır.
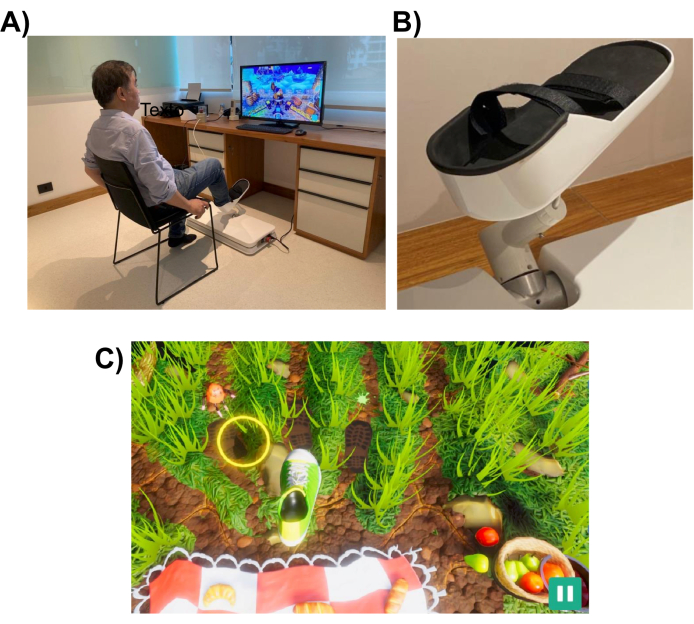
Şekil 1: Deney düzeneği. (A) Alt ekstremite için tasarlanmış robotik sistem (zemine monte edilmiş). Bir gönüllü, arayüzü sağ ayağıyla kullanırken gösterilir. (B) Deneğin ayağı için robotik sisteme bağlanmayı sağlayan destek yapısı. (C) Piknik oyununun ekran görüntüsü. Oyunun amacı ayağı (yeşil ve beyaz ayakkabı) hedefe (sarı daire) hareket ettirmektir. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
Robotik sistem, bir hastanın işaret etme veya tekme atma gibi günlük görevlerde yapılanlara benzer alt ekstremite hareketlerini gerçekleştirmesine yardımcı olmak için tasarlanmıştır. Bir bilgisayar monitöründe veya robotik cihazın önüne yerleştirilmiş bir televizyon ekranında görüntülenen etkileşimli sanal gerçeklik oyunlarını kullanır (bkz. Şekil 1). Robot ucu efektörü hastanın alt ekstremitesine (örneğin ayak bileği) takılır ve konumu ekrandaki bir imlecin konumuyla eşleştirilir. Tipik bir oyun, hastanın hareket hedeflerini gösterir (örneğin, işaret edilecek nesne veya topun nereye vurulacağı).
Hareket görevini tamamlamak için robot, hastaya tam yardımdan hiç yardıma kadar değişebilen bir yardım seviyesiyle yardımcı olabilir. Robotik yardım seviyesi, hastanın motor bozukluğu seviyesine göre her rehabilitasyon seansının başında seçilir. Denek tarafından gerçekleştirilen hareketler, oyun tarafından hastanın performansını puanlamak ve performansları hakkında geri bildirim sağlamak için kullanılır (örneğin, ROM, hareket sayısı ve robotik yardım seviyesi). Oyunlar, hastanın ilgisini ve dikkatini sürdürmek için etkileşimli ve eğlenceli olacak şekilde tasarlanmıştır. Bu çalışmada katılımcılar, oyuncunun böceklerin havluya ulaşmasını ve yiyeceği çalmasını engellemek zorunda kaldığı “Piknik oyununu” oynadılar (ekran görüntüsü için bkz. Şekil 1, alt panel).
Veri toplama, iki farklı sürekli dalga optod (760 nm ve 850 nm), 8 çift uçlu LED kaynağı ve 8 çift uçlu aktif dedektör içeren taşınabilir bir fNIRS toplama sistemi ile gerçekleştirildi. Sinyaller, 10.17 Hz’lik bir örnekleme hızı kullanılarak elde edildi. fNIRS sistemi tarafından oluşturulan bir Wi-Fi ağı kullanılarak kalibrasyon optimizasyonu ve sinyal kaydı için bir dizüstü bilgisayar kullanıldı.
Optodları önceden belirlenmiş yerlerde tutmak için bir kapak kullanıldı. Kaynaklar ve detektörler, 10-10 uluslararası EEG sistemine göre ızgara uzamsal dağılıma göre yerleştirildi. Her bir fNIRS kanalı, optodlar arası mesafeleri yaklaşık 30 mm olan bir kaynak-dedektör çifti tarafından tanımlandı. Optodlar, Şekil 2’de gösterilen konumlarda ek motor, ön motor ve motor alanlarının üzerine yerleştirildi. Toplam kanal sayısı 28 idi, burada 8’i tek bir dedektöre fiber optik adaptör kullanılarak her kaynağa bağlanan kısa mesafeli kanallardı. Donanımın çoğullama kurulumu göz önüne alındığında, tek bir dedektör kullanarak tüm kaynaklardan kısa mesafeli bilgi elde etmek mümkündür.
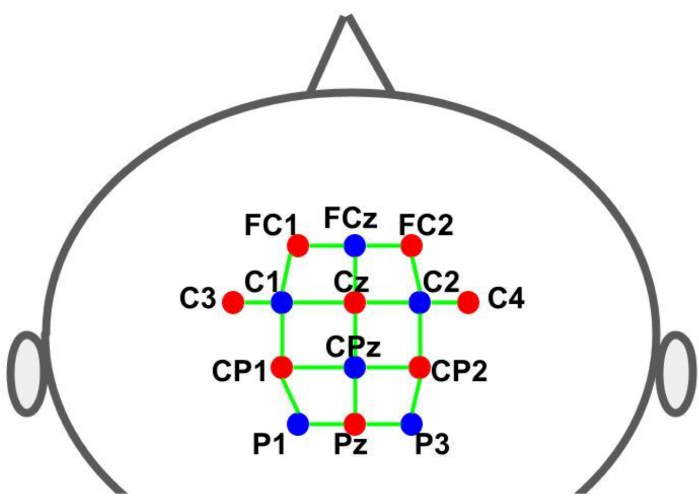
Şekil 2: 10-10 EEG sistemi kullanılarak montaj düzeni. Harfler ve sayılar kaynak/dedektör konumlarını gösterir. Kırmızı ve mavi noktalar sırasıyla kaynak ve dedektör optodlarını temsil eder. Yeşil çizgiler, kaynak ve dedektör çiftlerinden oluşan fNIRS kanallarını temsil eder. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
Deneysel tasarım
Deney, robotun deneğin hareketleri için sağladığı yardım seviyesinde farklılık gösteren iki farklı deney koşulu altında gerçekleştirildi. İlk koşulda robot, deneğin hareketlerine herhangi bir yardım sağlamayacak şekilde programlanırken, ikinci koşulda robot, deneğin ayak ve bacak hareketlerini kontrol etti (robot destekli hareket).
Her deney, Şekil 3’te gösterildiği gibi, bir motor görevin (oyunu oynamak – 30 s) ve dinlenmenin (30 s) alternatif döngülerini içeren bir blok tasarım paradigmasını izledi. Her aşamanın (oyun/oyun veya dinlenme) başlangıcı ve bitişi, bilgisayar ekranı aracılığıyla deneğe görsel olarak bildirildi. Dinlenme aşamasında, duraklamayı belirten bir mesaj görüntülendi. Her döngünün (oyun/oyun + dinlenme) süresi 60 saniyeydi ve altı kez tekrarlandı, bu da toplam 360 saniyelik (6 dakika) bir çalışma süresiyle sonuçlandı.
Katılımcılar, böceklerin havluya ulaşmasını ve yiyecek çalmasını önlemenin amaçlandığı “Piknik oyunu” oynadılar. Bu oyun, belirlenmiş bir ev hedefinden (başlangıç pozisyonu) başlayan ve ana hedefe dönmeden önce üç dış hedeften birine doğru uzanan bir dizi alt ekstremite hareketini içeriyordu. Ekranda, dış hedefler, katılımcıların ulaşması ve üzerine basması gereken hareketli böcekler olarak görsel olarak temsil edildi. Her hareket için ortak bir ana hedefin yanı sıra, her biri rastgele eşit sayıda sunulan üç dışa ulaşma hedefi vardı. Ayağın ana hedeften dış hedeflerin konumuna gitmesi gereken mesafe, yaklaşık 26 cm ölçülerinde bir yay oluşturdu. Motor görev, diz fleksiyonu/ekstansiyonu, plantar fleksiyon ve dorsifleksiyon hareketleri arasında koordinasyon gerektiren çok eklemli hareketlerin yürütülmesini gerektiriyordu.
fNIRS veri kayıtları, robot tarafından üretilen bir transistör-transistör-mantık (TTL) darbesi aracılığıyla oyun tarafından deneğe sunulan görsel uyaranlarla senkronize edildi. Her aşamanın başlangıcında (oyun/oyun ve dinlenme) darbeler üretildi. Böylece, tüm zamanlama kontrolü, katılımcıya her hareketi başlatması için görsel ipuçları (hedefler) sağlayan, beyin aktivite kayıtlarını işaretlemek için fNIRS sistemine TTL sinyalleri gönderen ve deney gerektiriyorsa, hareket yardımını başlatmak için robot kontrol sistemine sinyaller gönderen oyun tarafından gerçekleştirildi.
