Dados epidemiológicos indicam que no mundo ocorrem ~17 milhões de novos casos de AVC a cada ano, com aumento da incidência em países de baixa e médiarenda1. Estima-se que o número de novos casos aumente para 77 milhões até 20302. O comprometimento motor decorrente do acidente vascular encefálico (AVE) frequentemente afeta a mobilidade e a participação do paciente nas atividades de vida diária, contribuindo para uma baixa qualidade de vida. A reabilitação motora tradicional inclui a terapia manual, mas nas últimas décadas, sistemas robóticos para reabilitação foram desenvolvidos. Esses sistemas podem oferecer terapia em alta intensidade, dose, quantificabilidade, confiabilidade, repetibilidade e flexibilidade3 e têm mostrado potencial como tratamentos de reabilitação eficazes para pacientes com AVC agudo e crônico 4,5,6. Além de oferecer terapia, sistemas robóticos para reabilitação podem ser usados como ferramentas de avaliação, pois podem ser equipados com sensores que podem medir dados cinemáticos/cinéticos do movimento do paciente 7,8. Para a reabilitação motora dos membros superiores, tais dados não só têm se mostrado úteis para avaliar o nível de recuperação motora do paciente provocado pela terapia robótica e servido como ferramenta complementar às avaliações clínicas tradicionais 9,10, mas também têm contribuído para avançar na compreensão do processo de recuperação motora do AVE11, 12 bem como controle neural do movimento e aprendizagem motora em indivíduos saudáveis 3,13,14. Como resultado, esses achados forneceram uma base para melhorar os tratamentos de reabilitação15.
Nas últimas duas décadas, muitos dispositivos robóticos para neurorreabilitação de membros inferiores foram propostos, desde exoesqueletos que suportam o peso corporal do paciente durante a caminhada (por exemplo, sobre uma esteira, como Lokomat16) até sistemas robóticos estacionários que permitem ao paciente exercitar o tornozelo, joelho ou pé sem caminhar (como o tornozelo de Rutgers17, o High-Performance Ankle Rehabilitation Robot18 e o Gwangju Institute of Science and Technology (GIST) ankle/foot rehabilitationrobot 19) ou órteses ativas de pé que são exoesqueletos acionados usados pelo paciente para caminhar sobre o solo ou sobre uma esteira (como a Powered Gait Orthosis20 e a MIT Anklebot21). Ver 22,23,4 para uma revisão sobre robôs para reabilitação de membros inferiores.
Os resultados de estudos clínicos de dispositivos robóticos para reabilitação de membros inferiores em pacientes com AVC têm sido encorajadores e mostraram que esses sistemas podem melhorar a amplitude de movimento (ADM), a força muscular ou a marcha das articulações, dependendo do dispositivo específico e do protocolo clínico (ver 24,25 para uma revisão sobre a eficácia de robôs de membros inferiores para reabilitação). Embora tenha sido postulado que a terapia assistida por robô promove alterações neuroplásticas, que acabam resultando em melhora das habilidades motoras26, como ocorre exatamente o processo de recuperação motora do AVC e quais protocolos de treinamento robótico otimizam o processo de recuperação das habilidades motoras dos membros inferiores, permanecem na maioria das vezes obscuros. De fato, há uma disparidade significativa e crescente entre o crescente desenvolvimento de robôs de reabilitação (seja por pesquisadores acadêmicos ou entidades comerciais) e a compreensão limitada dos mecanismos neurofisiológicos subjacentes à recuperação motora4. Medidas de cinemática de movimento ou torques articulares realizadas com sensores embutidos têm contribuído para descrever quantitativamente as mudanças motoras comportamentais que ocorrem à medida que os pacientes recuperam as habilidades motoras dos membros inferiores27,28,29, preenchendo parcialmente essa lacuna. No entanto, os correlatos neurais subjacentes a tais alterações têm sido menos investigados. Isso se deve a vários motivos.
A imagem funcional do cérebro é demorada e, às vezes, difícil de concluir no contexto de ensaios clínicos, que muitas vezes exigem manter a carga do paciente mínima para maximizar a probabilidade de adesão do paciente ao estudo. Isso é particularmente verdadeiro para indivíduos que sofreram um acidente vascular cerebral, dado o fato de que fadiga pós-AVC e fraqueza muscular são frequentemente observadas30. Além disso, modalidades de imagem baseadas em campos magnéticos, como a ressonância magnética funcional (fMRI), exigem que o hardware do paciente e do robô seja seguro para o ímã.
Entre as modalidades de imagem não invasivas, a espectroscopia funcional no infravermelho próximo (fNIRS) é uma técnica de imagem particularmente adequada para avaliar áreas de ativação cerebral em indivíduos submetidos à terapia robótica. Da mesma forma que a fMRI, a fNIRS mede a oxigenação/desoxigenação sanguínea no cérebro. No entanto, ao contrário do fMRI, o fNIRS é totalmente compatível com hardware robótico, e muitas vezes é portátil, sendo até mesmo utilizável à beira do leito. Além disso, a fNIRS apresenta baixo custo e menor sensibilidade a artefatos de movimento 31,32,33.
Apesar de suas claras vantagens e uso difundido em muitos cenários clínicos desde sua primeira introdução no final da década de 7034, apenas alguns estudos utilizaram o fNIRS para quantificar a ativação cerebral associada aos movimentos dos membros inferiores e à recuperação motora do AVC. Estudos com FNIRS com o objetivo de elucidar mecanismos de controle neural do movimento e/ou mecanismos ou avaliação da recuperação motora de AVE têm investigado, em sua maioria, movimentos uniarticulares (por exemplo, dorsiflexão, flexão plantar ou extensão de joelhos35,36,37), marcha38,39,40,41,42,43 ou ciclismo44. Veja45 para uma revisão. Da mesma forma, os estudos da fNIRS sobre terapia assistida por robô para o membro inferior têm se concentrado principalmente na reabilitação da marcha assistida por robô; veja46 para uma revisão. Poucos estudos têm se concentrado no uso de fNIRS como parte de um sistema de Interface Cérebro-Computador (BCI) para derivar sinais de controle para dispositivos robóticos47,48; embora essa área de pesquisa também se baseie no processamento de sinais fNIRS, seu objetivo é diferente e focado principalmente na decodificação das intenções dos pacientes (por exemplo, pacientes com deficiências motoras graves).
O estudo piloto aqui apresentado é parte de um esforço inicial para investigar os efeitos de um sistema robótico na reabilitação de membros inferiores. O robô pode fornecer reabilitação de membros inferiores orientada a alvos que envolve treinamento em movimentos multiarticulares diários, bem como fornecer terapia para articulações únicas (por exemplo, joelho ou tornozelo) do membro inferior (ou seja, implementar um programa de reabilitação de baixo para cima).
O estudo teve como objetivo investigar a viabilidade de um protocolo experimental que exigisse a aquisição de dados do fNIRS durante a realização de movimentos de apontar multiarticulares para membros inferiores. A duração do período de aquisição de dados neste estudo, que foi limitado a 6 min, é menor do que os protocolos típicos de fNIRS. Essa foi uma escolha deliberada com o objetivo de aumentar a praticidade e a aplicabilidade clínica desta pesquisa, particularmente em pacientes com limitação de mobilidade ou força. Identificar correlatos fNIRS de movimentos multiarticulares tão complexos e obter insights sobre como a ativação cerebral foi modulada pela assistência de robôs também foram pontos de interesse. Para tanto, foram realizadas duas sessões de experimentos com os mesmos participantes: uma sem auxílio de robô e outra com auxílio de robô. Finalmente, é importante ressaltar que este estudo se concentrou em indivíduos saudáveis, a fim de estabelecer uma base para pesquisas futuras em termos de registro da viabilidade de protocolos e avaliação da ativação cerebral durante movimentos alvo de terapia robótica.
Aparelho
Um robô portátil projetado para realizar reabilitação de membros inferiores (ver Figura 1) foi usado para conduzir nossos experimentos. O robô tem um espaço de trabalho acessível em 3D e é compacto e leve, pesando cerca de 35 lb., o que facilita o transporte e a instalação.
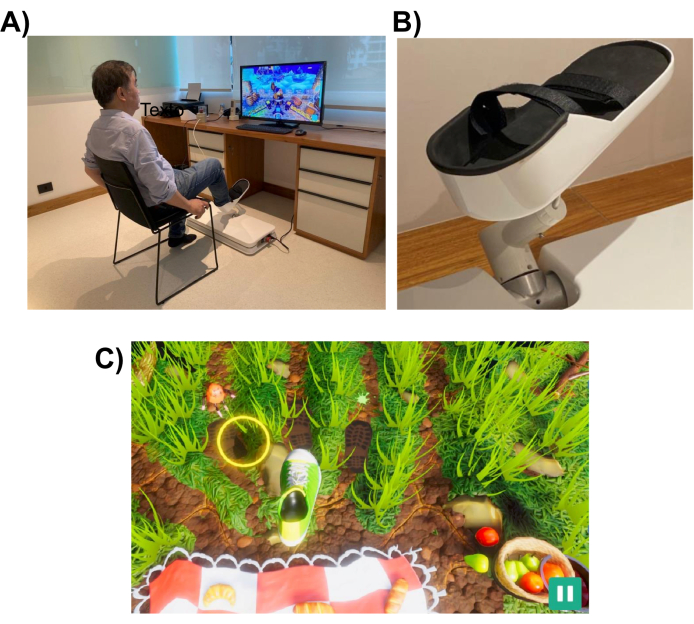
Figura 1: Montagem experimental: (A) O sistema robótico (instalado no chão) projetado para o membro inferior. Um voluntário é mostrado utilizando a interface com o pé direito. (B) Estrutura de apoio para o pé do sujeito que permite a fixação ao sistema robótico. (C) Uma captura de tela do jogo Picnic. O objetivo do jogo é mover o pé (sapato verde e branco) para o alvo (círculo amarelo). Clique aqui para ver uma versão maior desta figura.
O sistema robótico é projetado para auxiliar o paciente a realizar movimentos dos membros inferiores semelhantes aos realizados em tarefas cotidianas, como apontar ou chutar. Ele usa jogos interativos de realidade virtual, que são exibidos em um monitor de computador ou uma tela de televisão colocada na frente do dispositivo robótico (veja a Figura 1). O efetor robô-extremidade é anexado ao membro inferior do paciente (por exemplo, tornozelo), e sua posição é mapeada para a posição de um cursor na tela. Um jogo típico mostra os alvos de movimento do paciente (por exemplo, o objeto para apontar ou onde chutar a bola).
Para completar a tarefa de movimento, o robô pode ajudar o paciente com um nível de assistência que pode variar de assistência completa a nenhuma. O nível de assistência robótica é escolhido no início de cada sessão de reabilitação com base no nível de comprometimento motor do paciente. Os movimentos realizados pelo sujeito são usados pelo jogo para pontuar o desempenho do paciente e fornecer-lhe feedback sobre seu desempenho (por exemplo, ADM, número de movimentos e nível de assistência robótica). Os jogos são projetados para serem interativos e divertidos para manter o interesse e a atenção do paciente. Neste estudo, os participantes jogaram o “jogo do piquenique”, no qual o jogador tinha que impedir que os insetos alcançassem a toalha e roubassem o alimento (veja a Figura 1, painel inferior, para uma captura de tela).
A aquisição de dados foi realizada com um sistema portátil de aquisição fNIRS com dois diferentes optodes de onda contínua (760 nm e 850 nm), 8 fontes de LED de ponta dupla e 8 detectores ativos de ponta dupla. Os sinais foram adquiridos utilizando-se uma taxa de amostragem de 10,17 Hz. Um laptop foi utilizado para a otimização da calibração e gravação do sinal utilizando uma rede Wi-Fi criada pelo sistema fNIRS.
Uma tampa foi usada para manter os optodes nos locais pré-determinados. As fontes e os detectores foram colocados de acordo com o sistema internacional de EEG 10-10 em uma grade de distribuição espacial. Cada canal fNIRS foi definido por um par fonte-detector com distâncias interoptodes de aproximadamente 30 mm. Os optodes foram posicionados sobre as áreas motora suplementar, pré-motora e motora nos locais mostrados na Figura 2. O número total de canais foi de 28, sendo 8 canais de curta distância acoplados a cada fonte utilizando um adaptador de fibra óptica para um único detector. Dada a configuração de multiplexação do hardware, é possível adquirir informações de curta distância de todas as fontes usando apenas um detector.
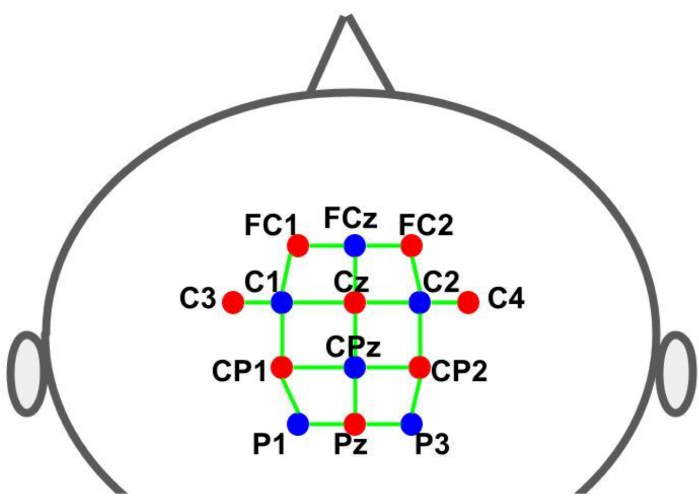
Figura 2: Layout de montagem utilizando o sistema de EEG 10-10. As letras e os números indicam a localização da fonte/detector. Os pontos vermelho e azul representam os optodes da fonte e do detector, respectivamente. As linhas verdes representam os canais fNIRS que consistem em pares de fontes e detectores. Clique aqui para ver uma versão maior desta figura.
Delineamento experimental
O experimento foi conduzido em duas condições experimentais distintas, diferindo no nível de assistência fornecido pelo robô para os movimentos do sujeito. Na primeira condição, o robô foi programado para não fornecer qualquer auxílio aos movimentos do sujeito, enquanto na segunda condição, o robô controlou os movimentos dos pés e pernas do sujeito (movimento assistido por robô).
Cada experimento seguiu um paradigma de planejamento de blocos envolvendo ciclos alternados de uma tarefa motora (jogar o jogo – 30 s) e descansar (30 s), como ilustrado na Figura 3. O início e a conclusão de cada fase (jogo/jogo ou descanso) foram sinalizados visualmente ao sujeito através da tela do computador. Durante a fase de descanso, uma mensagem indicando uma pausa foi exibida. Cada ciclo (jogo/jogo + descanso) teve duração de 60 s e foi repetido seis vezes, resultando em um tempo total de execução de 360 s (6 min).
Os participantes jogaram o “Jogo do piquenique”, em que o objetivo era evitar que insetos alcançassem a toalha e roubassem alimentos. Este jogo envolveu uma sequência de movimentos dos membros inferiores, começando a partir de um alvo doméstico designado (posição inicial) e estendendo-se para um dos três alvos externos antes de retornar ao alvo inicial. Na tela, os alvos externos eram representados visualmente como insetos em movimento animados, que os participantes tinham que alcançar e pisar. Havia três alvos de alcance externo, cada um apresentado aleatoriamente um número igual de vezes, ao lado de um alvo doméstico comum para cada movimento. A distância que o pé precisava percorrer do alvo doméstico até a posição dos alvos externos formava um arco, medindo aproximadamente 26 cm. A tarefa motora exigia a execução de movimentos multiarticulares, exigindo coordenação entre os movimentos de flexão/extensão do joelho, flexão plantar e dorsiflexão.
Os registros dos dados do fNIRS foram sincronizados com os estímulos visuais apresentados pelo jogo ao sujeito através de um pulso transistor-transistor-lógico (TTL) gerado pelo robô. Pulsos foram gerados no início de cada fase (jogo/jogo e repouso). Assim, todo o controle de cronometragem foi realizado pelo jogo, que forneceu pistas visuais (alvos) para o participante iniciar cada movimento, enviou sinais TTL para o sistema fNIRS para marcar os registros de atividade cerebral e, se exigido pelo experimento, enviou sinais para o sistema de controle do robô para iniciar a assistência ao movimento.
