Epidemiologiska data visar att det över hela världen finns ~17 miljoner nya fall av stroke varje år, med en ökning av incidensen i låg- och medelinkomstländer1. Antalet nya fall beräknas öka till 77 miljoner år 20302. Motorisk nedsättning på grund av stroke påverkar ofta patientens rörlighet och delaktighet i dagliga aktiviteter, vilket bidrar till en låg livskvalitet. Traditionell motorisk rehabilitering inkluderar manuell terapi, men under de senaste decennierna har robotsystem för rehabilitering utvecklats. Dessa system kan leverera behandling med hög intensitet, dos, kvantifierbarhet, tillförlitlighet, repeterbarhet och flexibilitet3 och har visat potential som effektiva rehabiliteringsbehandlingar för både akuta och kroniska strokepatienter 4,5,6. Förutom att ge terapi kan robotsystem för rehabilitering användas som utvärderingsverktyg eftersom de kan utrustas med sensorer som kan mäta patientens rörelsekinematiska / kinetiska data 7,8. För motorisk rehabilitering i övre extremiteterna har sådana data inte bara visat sig vara användbara för att bedöma nivån på patientens motoriska återhämtning som framkallas av robotterapi och fungerat som ett kompletterande verktyg till traditionella kliniska bedömningar 9,10, utan de har också bidragit till att öka förståelsen för processen för motorisk återhämtning från stroke11, 12 samt neural kontroll av rörelse och motorisk inlärning hos friska försökspersoner 3,13,14. Som ett resultat av detta har dessa fynd gett en grund för att förbättra rehabiliteringsbehandlingarna15.
Under de senaste två decennierna har många robotenheter för neurorehabilitering av nedre extremiteter föreslagits, allt från exoskelett som stöder patientens kroppsvikt under gång (t.ex. över ett löpband, som Lokomat16) till stationära robotsystem som gör det möjligt för patienten att träna fotleden, knäet eller foten utan att gå (t.ex. Rutgers Ankle17, High-Performance Ankle Rehabilitation Robot18 och Gwangju Institute of Science and Technology (GIST) fotleds-/fotrehabiliteringsrobot19) eller aktiva fotortoser som aktiveras exoskelett som bärs av patienten för att gå över marken eller över ett löpband (t.ex. Powered Gait Orthosis20 och MIT Anklebot21). Se 22,23,4 för en genomgång av robotar för rehabilitering av nedre extremiteter.
Resultaten av kliniska studier av robotutrustning för rehabilitering av nedre extremiteter på strokepatienter har varit uppmuntrande och har visat att dessa system kan förbättra ledernas rörelseomfång (ROM), muskelstyrka eller gång, beroende på den specifika enheten och det kliniska protokollet (se 24,25 för en granskning av effektiviteten hos robotar för nedre extremiteter för rehabilitering). Även om det har antagits att robotassisterad terapi främjar neuroplastiska förändringar, som i slutändan resulterar i förbättrade motoriska förmågor26, är det fortfarande mestadels oklart hur processen för motorisk återhämtning från stroke exakt sker och vilka robotträningsprotokoll som optimerar processen för återhämtning av motoriska förmågor i nedre extremiteterna. Faktum är att det finns en betydande, växande skillnad mellan den ökande utvecklingen av rehabiliteringsrobotar (antingen av akademiska forskare eller kommersiella enheter) och den begränsade förståelsen av de neurofysiologiska mekanismer som ligger till grund för motorisk återhämtning4. Mätningar av rörelsekinematik eller ledmoment tagna med inbyggda sensorer har bidragit till att kvantitativt beskriva motoriska beteendeförändringar som uppstår när patienter återfår motoriska förmågori nedre extremiteterna 27,28,29, vilket delvis fyller denna lucka. De neurala korrelat som ligger till grund för sådana förändringar har dock undersökts mindre. Detta beror på flera anledningar.
Funktionell avbildning av hjärnan är tidskrävande och ibland svår att genomföra i samband med kliniska prövningar, som ofta kräver att patientbördan minimeras för att maximera sannolikheten för att patienten följer studien. Detta gäller särskilt för personer som har drabbats av stroke, med tanke på att trötthet och muskelsvaghet efter stroke ofta observeras30. Avbildningsmodaliteter som är baserade på magnetfält, såsom funktionell magnetisk resonanstomografi (fMRI), kräver också att både patient- och robothårdvara är magnetsäker.
Bland icke-invasiva avbildningsmodaliteter är funktionell nära-infraröd spektroskopi (fNIRS) en avbildningsteknik som är särskilt lämplig för att bedöma områden för hjärnaktivering hos personer som genomgår robotterapi. På samma sätt som fMRI mäter fNIRS blodets syresättning/deoxygenering i hjärnan. Men till skillnad från fMRI är fNIRS helt kompatibel med robothårdvara, och den är ofta bärbar, till och med användbar vid sängen. Dessutom har fNIRS låg kostnad och mindre känslighet för rörelseartefakter 31,32,33.
Trots dess tydliga fördelar och utbredda användning i många kliniska miljöer sedan dess första introduktion i slutet av 70-talet34, har endast ett fåtal studier använt fNIRS för att kvantifiera hjärnaktivering i samband med rörelser i nedre extremiteter och strokemotorisk återhämtning. FNIRS-studier som syftar till att belysa mekanismer för neural kontroll av rörelse och/eller mekanismer eller utvärdering av motorisk återhämtning från stroke har främst undersökt rörelser i en led (t.ex. dorsalflexion, plantarflexion eller knäextensionsrörelser 35,36,37), gång 38,39,40,41,42,43 eller cykling 44. Se45 för en recension. På samma sätt har fNIRS-studier om robotassisterad terapi för de nedre extremiteterna främst fokuserat på robotassisterad gångrehabilitering; Se46 för en recension. Några studier har fokuserat på att använda fNIRS som en del av ett Brain-Computer Interface (BCI) -system för att härleda styrsignaler för robotenheter47,48; även om detta forskningsområde också är beroende av bearbetning av fNIRS-signaler, är dess mål annorlunda och främst inriktat på att avkoda patientens avsikter (t.ex. patienter med svåra motoriska funktionsnedsättningar).
Pilotstudien som presenteras här är en del av ett första försök att undersöka effekterna av ett robotsystem för rehabilitering av nedre extremiteter. Roboten kan leverera målinriktad rehabilitering av nedre extremiteter som involverar träning i vardagliga flerledsrörelser samt ge terapi till enskilda leder (t.ex. knä eller fotled) i nedre extremiteten (dvs. implementera ett rehabiliteringsprogram nedifrån och upp).
Studien syftade till att undersöka genomförbarheten av ett experimentellt protokoll som krävde insamling av fNIRS-data under utförandet av pekrörelser i nedre extremiteter och flera leder. Varaktigheten av datainsamlingsperioden i denna studie, som var begränsad till 6 minuter, är kortare än typiska fNIRS-protokoll. Detta var ett medvetet val som gjordes i syfte att förbättra den praktiska och kliniska tillämpbarheten av denna forskning, särskilt hos patienter med begränsad rörlighet eller styrka. Att identifiera fNIRS-korrelat till sådana komplexa rörelser i flera leder och få insikter i hur hjärnaktivering moduleras av robotassistans var också intressanta punkter. För detta ändamål genomfördes två experimentsessioner med samma deltagare: en utan robotassistans och en med robotassistans. Slutligen är det viktigt att påpeka att denna studie fokuserade på friska försökspersoner för att skapa en grund för framtida forskning när det gäller att registrera protokollgenomförbarhet och utvärdering av hjärnaktivering under rörelser som är inriktade på robotterapi.
Apparat
En bärbar robot som är utformad för att ge rehabilitering av nedre extremiteter (se figur 1) användes för att utföra våra experiment. Roboten har en 3D-nåbar arbetsyta och är kompakt och lätt, väger cirka 35 lb., vilket gör den enkel att transportera och installera.
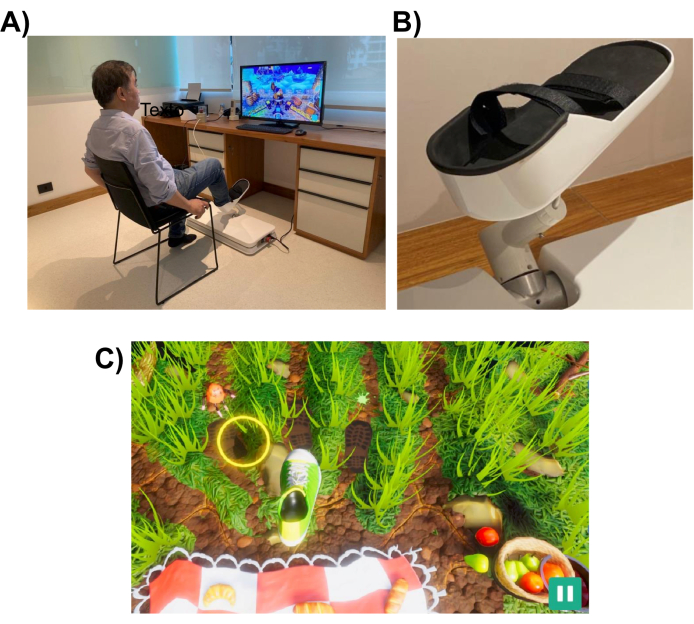
Figur 1: Experimentell uppställning. (A) Robotsystemet (installerat på golvet) som är utformat för den nedre extremiteten. En volontär visas använda gränssnittet med sin högra fot. (B) Stödstruktur för försökspersonens fot som möjliggör fastsättning på robotsystemet. (C) En skärmdump av Picnic-spelet. Målet med spelet är att flytta foten (grön och vit sko) till målet (gul cirkel). Klicka här för att se en större version av denna figur.
Robotsystemet är utformat för att hjälpa en patient att utföra rörelser i nedre extremiteter som liknar de som utförs i vardagliga uppgifter, som att peka eller sparka. Den använder interaktiva virtual reality-spel, som visas på en datorskärm eller en tv-skärm placerad framför robotenheten (se figur 1). Robotgripdonet fästs på patientens nedre extremitet (t.ex. fotleden) och dess position mappas till positionen för en markör på skärmen. Ett typiskt spel visar patientens rörelsemål (t.ex. föremålet att peka på eller var man ska sparka bollen).
För att slutföra rörelseuppgiften kan roboten hjälpa patienten med en assistansnivå som kan variera från full assistans till ingen. Nivån på robotassistansen väljs i början av varje rehabiliteringssession baserat på patientens nivå av motorisk funktionsnedsättning. Rörelserna som utförs av försökspersonen används av spelet för att poängsätta patientens prestation och ge dem feedback om deras prestation (t.ex. ROM, antal rörelser och nivå av robotassistans). Spelen är utformade för att vara interaktiva och underhållande för att upprätthålla patientens intresse och uppmärksamhet. I den här studien spelade deltagarna “Picknick-spelet”, där spelaren var tvungen att stoppa insekterna från att nå handduken och stjäla maten (se figur 1, nedre panelen, för en skärmdump).
Datainsamlingen utfördes med ett portabelt fNIRS-insamlingssystem med två olika kontinuerliga vågopatoder (760 nm och 850 nm), 8 dual-tip LED-källor och 8 dual-tip aktiva detektorer. Signalerna samlades in med en samplingsfrekvens på 10,17 Hz. En bärbar dator användes för kalibreringsoptimering och signalregistrering med hjälp av ett Wi-Fi-nätverk skapat av fNIRS-systemet.
En mössa användes för att hålla optoderna på de förutbestämda platserna. Källorna och detektorerna placerades enligt det internationella EEG-systemet 10-10 i en rutnätsfördelning. Varje fNIRS-kanal definierades av ett källdetektorpar med interoptodavstånd på cirka 30 mm. Optoderna placerades över de kompletterande motor-, förmotor- och motorområdena på de platser som visas i figur 2. Det totala antalet kanaler var 28, varav 8 var kortdistanskanaler som kopplades till varje källa med hjälp av en fiberoptisk adapter till en enda detektor. Med tanke på hårdvarans multiplexeringsinställning är det möjligt att samla in information på korta avstånd från alla källor med endast en detektor.
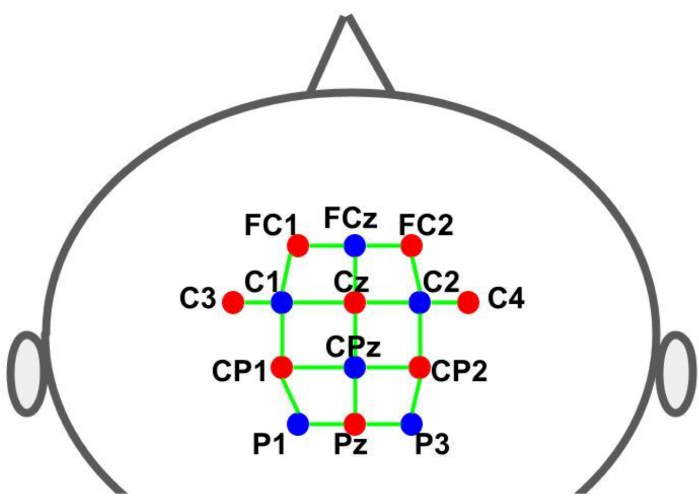
Figur 2: Montagelayout med 10-10 EEG-systemet. Bokstäverna och siffrorna anger källans/detektorns placering. De röda och blå prickarna representerar käll- respektive detektoroptoderna. De gröna linjerna representerar fNIRS-kanalerna som består av käll- och detektorpar. Klicka här för att se en större version av denna figur.
Experimentell design
Experimentet utfördes under två distinkta experimentella förhållanden, som skilde sig åt i nivån av assistans från roboten för försökspersonens rörelser. I det första tillståndet var roboten programmerad att inte ge någon hjälp till försökspersonens rörelser, medan roboten i det andra tillståndet styrde försökspersonens fot- och benrörelser (robotassisterad rörelse).
Varje experiment följde ett paradigm för blockdesign som involverade alternerande cykler av en motorisk uppgift (spela spelet – 30 s) och vila (30 s), vilket illustreras i figur 3. Början och slutet av varje fas (lek/spel eller vila) signalerades visuellt till försökspersonen via datorskärmen. Under vilofasen visades ett meddelande som indikerade en paus. Varje cykel (spel/spel + vila) hade en varaktighet på 60 s och upprepades sex gånger, vilket resulterade i en total körtid på 360 s (6 min).
Deltagarna lekte “Picknickleken”, där målet var att hindra insekter från att nå handduken och stjäla mat. Detta spel involverade en sekvens av rörelser i de nedre extremiteterna, som började från ett utsett hemmål (initial position) och sträckte sig mot ett av tre yttre mål innan de återvände till hemmålet. På skärmen representerades de yttre målen visuellt som animerade rörliga insekter, som deltagarna var tvungna att nå och kliva på. Det fanns tre mål som sträckte sig utåt, var och en slumpmässigt presenterad lika många gånger, tillsammans med ett gemensamt hemmål för varje rörelse. Avståndet som foten behövde för att färdas från hemmålet till de yttre målens position bildade en båge, ungefär 26 cm. Den motoriska uppgiften krävde utförande av flerledsrörelser, vilket krävde koordination mellan knäböjning/sträckning, plantarflexion och dorsalflexionsrörelser.
fNIRS-datainspelningarna synkroniserades med de visuella stimuli som spelet presenterade för försökspersonen genom en transistor-transistor-logisk (TTL) puls som genererades av roboten. Pulser genererades i början av varje fas (lek/spel och vila). Således utfördes all tidskontroll av spelet, som gav visuella signaler (mål) till deltagaren för att starta varje rörelse, skickade TTL-signaler till fNIRS-systemet för att markera hjärnaktivitetsregistreringarna och, om experimentet krävde det, skickade signaler till robotens styrsystem för att initiera rörelsehjälp.
