越来越多的小型和便携式超声 (美国) 扫描仪的市场, 导致了新的超声探头的发展, 其中一部分的信号调理和波束形成电子集成到探头手柄, 特别是3维/4 维成像1. 特别适合于实现这一高水平集成的新兴技术包括微机械超声换能器 (车组)2, 即在硅上制造的一类微型机电系统 (MEMS) 传感器。特别是, 电容车组 (CMUTs) 终于达到了技术成熟, 使他们成为一个有效的替代压电传感器的下一代超声成像系统3。CMUTs 是非常诱人的, 因为他们与微电子技术的兼容性, 宽带宽-它产生更高的图像分辨率-高热效率, 最重要的是, 高灵敏度4。就 ENIAC JU 项目的上下文 DeNeCoR (设备为控制和康复)5, CMUT 探针正在开发6为美国脑成像应用 (如神经外科), 其中高品质2维/3 d/4 d 图像和大脑结构的精确表示是必需的。
在美国新探针的开发过程中, 对成像性能进行早期评估的可能性是基本的。典型的评估技术涉及测量特定参数, 如分辨率和对比度, 基于组织模仿幽灵的图像与嵌入目标的已知几何和回声。更现实的分析与应用特定的成像目标, 可以是非常宝贵的早期评估的预期性能的美国探针在其潜在的应用领域的具体临床。另一方面, 获取的完全重复性是对不同配置进行比较测试的基础, 这一要求完全排除了在体内实验。
关于诊断成像技术的文献中的几项著作提出使用ex 活体动物标本7, 尸体大脑8, 或组织模仿幻影9用于不同目的10, 其中包括测试成像方法, 注册算法, 磁共振 (MR) 序列, 或美国光束模式和产生的图像质量。例如, 在大脑成像的上下文中, Lazebnik et al.7使用福尔马林固定的绵羊脑来评估新的 3D MR 登记方法;同样, 崔et al.11研究了一个固定的猫头鹰猴脑的 MR 和光镜图像的登记过程。聚乙烯醇 (PVA) 脑幻影是在9中开发的, 用于执行多式图像获取 (即MR 和计算机断层扫描) 来生成共享图像数据集12 , 用于测试注册和成像算法。
总的来说, 这些研究证实, 在开发一种新的成像技术的过程中, 对图像采集的实际目标的使用确实是一个必不可少的步骤。这代表了一个更关键的阶段, 当设计一个新的成像设备, 如 CMUT 美国探针提出在本文中, 这仍然是在一个原型阶段, 需要广泛和可重复的测试随着时间的推移, 以准确调整所有设计在体内应用程序的最终实现和可能的验证之前的参数 (如13、14、15)。
本文所描述的实验协议, 旨在为基于 CMUT 技术的新开发的美国探测器提供一个健壮的、应用特定的成像评估程序。为了保证现实主义和重复性, 在福尔马林中固定的牛脑 (通过标准的食品供应商业链获得) 被选为成像靶点。固定程序保证长期保存的组织特征, 同时保留令人满意的形态学质量和可见性的属性在美国和磁共振成像16,17。
这里描述的美国图像质量评估协议也实现了一种从神经导航技术中借用的功能15。在这种方法中, 美国探针连接到一个运动跟踪系统, 提供空间位置和方位数据在 real-time。这样, 美国在手术过程中获得的图像可以自动注册和可视化, 用于指导, 叠加到 pre-operatory 患者大脑的 mr 图像中。对于所提出的协议的目的, 磁共振图像叠加 (被认为是脑成像中的金标准) 是很有价值的, 因为它允许人类专家在视觉上评估哪些形态和组织特征是可辨认的在美国的图像, 反之亦然, 承认存在的影像文物。
有可能比较不同的美国探针所获得的图像变得更加有趣。所提出的实验协议包括了为美国收购定义一组空间参照构成的可能性, 重点是在对 MR 图像进行初步目视检查时确定的最富特色的体积区域。为 Paraview 开放源码软件系统18开发的集成可视化工具为操作员提供了在美国图像采集阶段匹配此类预定义姿势的指导。对于该协议所要求的校准程序, 将所有目标标本 (无论是生物的还是合成的) 配备预定位置地标, 提供明确的空间参考, 是至关重要的。此类地标必须在美国和 MR 图像中可见, 并可在运动跟踪系统中进行测量。选择的地标元素为实验是火石玻璃的小球形, 它的可见性在美国和 mr 图象在文学19被证明了并且由初步美国和 mr 扫瞄证实在提出的实验之前。
所提出的协议依赖于超声高级开放平台 (ULA OP)20, 一个完整的和开放的美国图像采集研究和开发系统, 它提供了比商业可用的更广泛的实验可能性扫描仪和服务作为一个共同的依据为不同的美国探针的评估。
首先, 介绍了这项工作所用的仪器, 并特别参考了新设计的 CMUT 探头。实验方案介绍详细介绍了所涉及的所有程序, 从初始设计到系统校准, 再到图像采集和后处理。最后, 给出了所得到的图像, 并对结果进行了讨论, 并对该工作的未来发展作了提示。
仪器
CMUT 探头原型
实验采用了新开发的256元 CMUT 线性阵列原型, 设计, 制作, 并包装在 Acoustoelectronics 实验室 (ACULAB) 的罗马大学 (罗马, 意大利), 使用 CMUT 逆向制作过程 (RFP)4。RFP 是一种微细加工和封装技术, 专门为实现美国成像应用的 MEMS 传感器而构思, 据此, 在 “倒置” 方法21后, 在硅上制作 CMUT 微结构。与其他 CMUT 制造技术相比, 由于 CMUT 单元的几何形状在整个阵列上的高度均匀性以及探头头封装中的声学工程材料的使用, RFP 的成像性能得到改善。RFP 的一个重要特点是, 电气互连垫位于 CMUT 模具的后部, 它简化了2D 阵列和 front-end 多通道电子的3维集成。
256元 CMUT 阵列设计为以 7.5 MHz 为中心的频带运行。为阵列选择了200µm 的元素间距, 从而使最大视宽度为 51.2 mm。对单 CMUT 阵元的高度进行了定义, 以达到在横向分辨率和穿透能力方面的适当性能。选择一个 5 mm 数组元素高度, 以获得-3 db 波束宽度0.1 毫米和-3 db 深度的焦点1.8 毫米在7.5 兆赫, 当固定海拔焦点在深度18毫米通过一个声学透镜。195µm 宽阵列单元是通过排列和电连接在平行的344圆 CMUT 细胞, 按照六角形布局。因此, 产生的5µm 元素距离,即切口, 匹配 membrane-to-membrane 分离。在图 1中报告了 CMUT 数组结构的示意图表示形式。
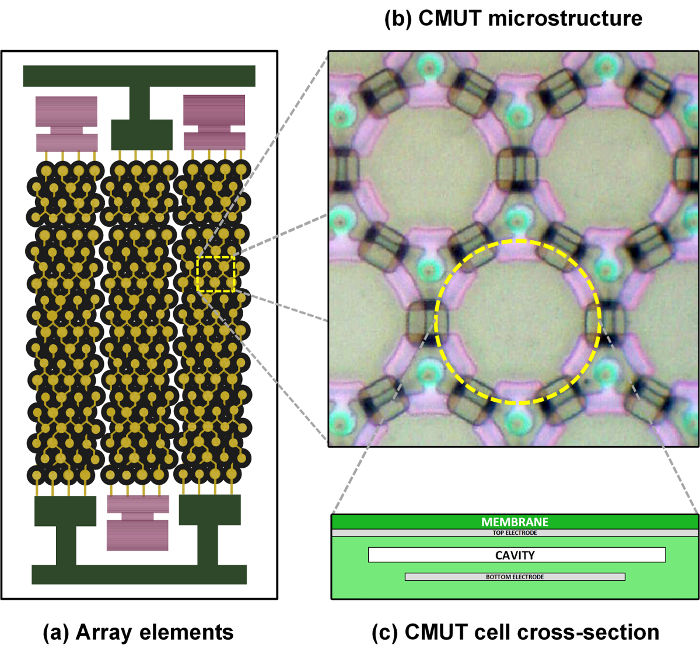
图 1: CMUT 阵列结构.CMUT 阵列结构的示意图表示: 由多个单元组成的阵列元素 (a), CMUT 显微结构的布局 (b);CMUT 细胞的横断面 (c)。请单击此处查看此图的较大版本.
CMUT 的微细加工参数,即板和电极的横向和垂直尺寸, 是用有限元模拟 (FEM) 仿真来定义的, 目的是实现宽带浸入操作, 其特点是频率响应以 7.5 MHz 和 100%-6 dB two-way 分数带宽为中心。腔的高度,即间隙, 被定义为达到260伏的崩溃电压以最大限度地提高 two-way 灵敏度, 通过将 CMUT 在崩溃电压4的70% 上偏置, 考虑80伏最大励磁信号电压。表1总结了 microfabricated CMUT 的主要几何参数。
| CMUT 阵列设计参数 | |
| 参数 | 值 |
| 数组 | |
| 元素数 | 256 |
| 元素间距 | 200µm |
| 元素长度 (海拔) | 5毫米 |
| 固定标高焦点 | 15毫米 |
| CMUT 显微组织 | |
| 细胞直径 | 50µm |
| 电极直径 | 34µm |
| 细胞侧向距离 | 7.5 µm |
| 板材厚度 | 2.5 µm |
| 间隙高度 | 0.25 µm |
表1。CMUT 探头参数.CMUT 线性阵列探针和 CMUT 细胞显微结构的几何参数。
用于将 CMUT 阵列集成到探针头中的封装过程在参考4中进行了描述。该声学透镜是使用室温硫化硅橡胶掺杂金属氧化物纳米粉体, 以匹配水的声学阻抗和避免在接口22的虚假反射。结果化合物的特点是密度1280年公斤/米3和声速1100年米/秒。为圆柱形透镜选择了一个 7 mm 曲率半径, 导致了 18 mm 的几何焦点和传感器表面上方大约 0.5 mm 的最大厚度。CMUT 探测头的图片显示在图 2(a)中。
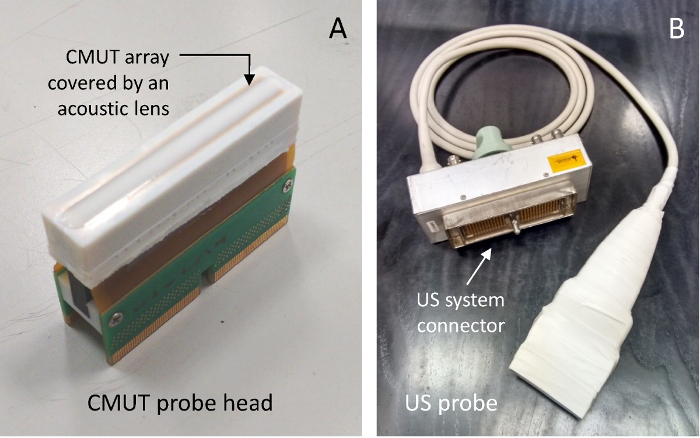
图 2: CMUT 探头.开发的 CMUT 探头的头部, 包括传感器和声学透镜 (a) 的线性阵列, 以及连接器 (b) 的全 CMUT 探头。请单击此处查看此图的较大版本.
CMUT 探针头被耦合到探头手柄, 包含多通道接收模拟 front-end 电子学和与美国扫描仪连接的多极电缆。单通道电子电路是一种高输入阻抗 9 dB 增益电压放大器, 它提供了驱动电缆阻抗所必需的电流。在参考4中描述的多通道电子, 基于电路拓扑, 包括超低功耗低噪声接收机和用于发射/接收信号双工的集成开关。front-end 电子电源和 CMUT 偏置电压由自定义电源单元生成, 并通过多极电缆送入探头。完整的探测器显示在图 2(b)中。
压电式美国探头
CMUT 探针图像的定性比较在上述实验中, 两个商业可用的压电式美国探针被包括在内。第一个是一个线性阵列探针与192换的元素, 一个245µm 音高, 和110% 的分数带宽为中心, 在 8 MHz。该探头用于获取 2D B 型图像。第二个探针是一个探针为3D 成像与机械地被扫描的线性阵列180换元素, 以245µm 沥青和100% 分数带宽集中在8.5 兆赫。放置在探头外壳内的步进电机可使线性阵列获得多个平面, 可用于重建扫描卷23的3D 图像。
ULA-OP 系统
美国图象的承购通过使用 ULA-OP 系统20, 是一个完整和开放美国研究和开发系统, 设计和体会在意大利佛罗伦萨大学的微电子系统设计实验室。ULA-OP 系统可以控制, 无论是在传输 (TX) 和接收 (RX), 多达64独立通道通过开关矩阵连接到美国探头与多达192压电或 CMUT 传感器。该系统结构具有两个主要的处理板, 一个模拟板 (AB) 和一个数字板 (DB), 两者都包含在一个机架, 这是完成由电源板和后平面板, 其中包含探头连接器和所有内部路由组件.AB 包含 front-end 到探针变换器, 特别是电子组分为64个渠道和可编程的开关矩阵的模拟的制约动态地映射 TX RX 渠道对传感器。DB 负责 real-time 波束形成, 合成 TX 信号并处理 RX 回波以产生所需的输出 (例如 B 型图像或多普勒声像)。值得强调的是, ULA-OP 系统是完全可配置的, 因此 TX 中的信号可以是系统带宽内任意的波形 (例如三级脉冲、正弦猝发、啁啾、哈夫曼代码、等), 最大振幅为 180 Vpp;此外, 波束形成策略可以根据最新的聚焦模式进行编程 (例如聚焦波、多线传输、平面波、发散波、有限衍射光束、等)24、25.在硬件级别, 这些任务在五现场可编程门阵列 (fpga) 和一个数字信号处理器 (DSP) 之间共享。通过机械扫描的3D 成像探头, 如上面描述的那样, ULA-OP 系统还控制探头内部的步进电机, 用于在传感器阵列的每个位置同步获取单个2D 帧。
ULA-OP 系统可以在运行时配置, 适应不同的美国探针。它通过 USB 2.0 通道与上位机进行通信, 并配备了特定的软件工具。后者有一个可配置的图形界面, 提供 real-time 可视化的美国图像, 在不同的模式重建;例如, 使用体积探针, 在扫描的体积中, 两个 B 模式的垂直平面图像可以显示在 real-time 中。
ULA-OP 系统的主要优点是为所描述的协议的目的, 它允许对 TX RX 参数进行简单的调整, 它提供了对处理链26中每个步骤所收集的信号数据的完全访问, 也使它成为可能测试新的成像方式和波束形成技术27,28,29,30,31,32,33。
运动跟踪系统
为了在图像采集过程中记录美国探针的位置, 采用了一个光学运动跟踪系统34。该系统基于一个传感器单元, 通过两个照明 (发光二极管) 发射红外线, 并使用两个接收机 (即一个透镜和一个电荷耦合器件 (CCD)) 来检测由多个目标特定的被动反射的光。在预定义的刚性形状中排列的标记。然后由 on-board 的 CPU 处理有关反射光的信息, 以计算位置和方向数据, 可以将其传输到通过 USB 2.0 连接的主机。同一链接可用于控制传感器单元的配置。
传感器单元与一套工具一起运送, 每一个都配有四反射标记, 并以刚性的几何构型排列。运动跟踪系统可以同时跟踪多达六不同的刚性工具, 工作频率约为20赫兹。这些实验使用了两种工具: 一个指针工具, 它允许获取其尖端所触及的3D 位置, 以及一个夹具装备的工具, 可以连接到正在测试的美国探测器 (请参见图 14)。
在软件方面, 运动跟踪器具有一个低级串行应用程序编程接口 (API), 用于单元控制和数据采集, 可以通过 USB 访问。默认情况下, 位置和方向作为多次项返回,即每个要跟踪的工具都有一个条目。每个条目包含一个3D 的位置 (x, y, z), 以 mm 和方向 (q0, qx, qy, qz) 表示为四元数。该系统还附带了一个 higher-level 软件工具的工具箱, 其中包括一个图形跟踪工具, 用于可视化和测量在 real-time 的位置/方向的多工具在传感器单位的视野。
系统概述、集成和软件组件
图 3中的关系图总结了为协议所采用的检测方法, 并描述了跨系统流动的数据流。
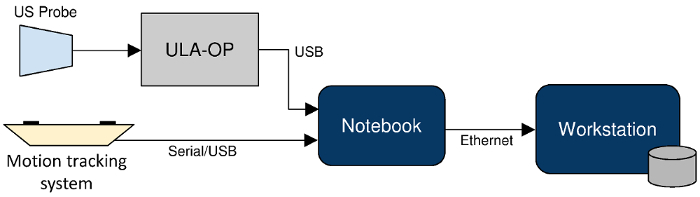
图 3: 整个硬件设置和系统集成的框图。美国探针连接到 ULA-OP 系统, 通过 USB 与笔记本电脑进行通信以获得美国的图像采集。同时, 笔记本也通过 USB 连接到运动跟踪系统, 用于位置数据采集, 并通过以太网到工作站, 进行数据处理。请单击此处查看此图的较大版本.
除了美国的探针, 运动跟踪器, 和 ULA-OP 系统, 上面已经描述, 安装程序还包括两台计算机, 即笔记本和工作站。前者是仪器的主要 front-end, 接收和同步两个主要的传入数据流: 美国的图像来自 ULA-OP 系统和3D 定位数据从运动跟踪器。它还为所获取的图像提供了对操作员的视觉反馈。工作站的计算能力和存储容量大大提高。它为图像后处理和组合成像数据集的存储库提供后端支持。工作站也使用为我们和 MR 图像的可视化, 包括可能同时3D 可视化的注册多模态图像。
图像采集实验的一个关键要求是两个主要数据流的同步。运动跟踪和 ULA 系统是一种独立的工具, 它们还不支持活动的显式同步。由于这一点, 美国的图像数据和位置信息需要适当地结合起来, 以检测每个图像切片获得时美国探针的正确3D 位置。为此, 开发了一个特定的日志记录应用程序, 用于记录和戳 real-time 由运动跟踪系统提供的数据, 方法是修改包括在本例中的运动跟踪器本身在内的 c++ 软件组件。通常, 运动跟踪系统的功能是低级 API, 它允许在 real-time 中捕获数据并将其转录到文件中。
采用的同步方法如下所示。日志应用程序生成的文件中的每个条目都以格式 “ddThh: 三 k 党: y = 年, m = 月, d = 天, h = 小时, m = 分钟, s = 秒, k = 毫秒。基于 ULA 的基于 pc 的软件 (c++ 和 MATLAB 编程语言) 计算每个图像采集序列的开始和结束时间, 并将这些信息存储在. vtk 格式的每个图像中。为了在实验过程中提供一个公共的时态参考, 上述软件过程都在图 3中的 front-end 计算机上执行。然后, 以这种方式生成的时间戳将由生成最终数据集的后期处理软件过程使用 (参见协议, 8 节)。
另一个特定的软件组件实现并运行在工作站上, 通过将当前的美国探头位置与 mr 图像相关, 特别是与预定义的姿态组合, 从而向操作员提供 real-time 反馈。Python 中的服务器端软件例程处理运动跟踪程序日志文件, 将当前的美国探测位置转换为几何形状, 并将数据发送到 Paraview 服务器。Paraview 客户端连接到相同的 Paraview 服务器, 在 real-time 中显示几何形状的位置, 叠加在 MR 图像上, 并用于描述预定义姿势的进一步几何形状。图 17显示了生成的 real-time 可视化的示例。
