신호 컨디셔닝 및 빔 형성의 어느 부분에서 전자는 특히 3D/4d 영상에 대 한 프로브 핸들에 통합 하는 새로운 echographic 프로브 개발 (미국) 작은 휴대용 초음파 스캐너에 대 한 증가 시장 선도 1. 통합의이 높은 수준을 달성 하기 위해 적합 특히 신흥 기술을 포함 휘트스톤 초음파 트랜스듀서 (MUTs)2, 실리콘에 조작 하는 마이크로 전기 기계 시스템 (MEMS) 변환기의 클래스. 특히, 정전 용량 MUTs (CMUTs) 마지막으로 그들에 게 다음 세대가 초음파에 이미징 시스템3압 전 트랜스듀서에 대 한 유효한 대안 기술 성숙에 도달 했습니다. CMUTs는 그들의 호환성 모든, 높은 감도4위에, 그리고 반도체 기술, 넓은 대역폭-수율 높은 이미지 해상도-높은 열 효율 때문에 매우 매력적인. ENIAC 주 프로젝트 DeNeCoR (NeuroControl 및 NeuroRehabilitation 장치)5의 맥락에서 CMUT 프로브 되 고 어디에 높은-품질 응용 프로그램 (예: 신경외과), 이미징 미국 두뇌 개발된6 2D/3D/4d 이미지와 뇌 구조의 정확한 표현이 됩니다.
새로운 미국 프로브 개발 과정에서 성능 이미징의 초기 평가 수행의 가능성은 기본 이다. 일반적인 평가 기술을 알려진 형상과 echogenicity의 임베디드 목표와 조직 흉내 낸 팬텀의 이미지에 따라 명암과 해상도 같은 특정 파라미터 측정을 포함 한다. 응용 프로그램별 이미징 목표 보다 현실적인 분석 미국 프로브 특정 임상 분야에 그들의 잠재적인 응용 프로그램에서의 예상 되는 성능에 대 한 초기 평가 대 한 매우 유용할 수 있습니다. 다른 한편으로, 취득의 완전 한 반복성 시간이 지나면서 다른 구성의 비교 테스트에 대 한 기본 이며이 요구 전부 vivo에서 실험 규칙.
진단 이미징 기법에 문학에서 여러 작품 제안 비보 전 동물 표본7, 시신 두뇌8또는 다른 목적10, 유령9 를 흉내 낸 조직 사용을 포함 하는 이미징 방법, 등록 알고리즘, 자기 공명 (MR) 시퀀스, 또는 미국 빔 패턴의 테스트 하 고 결과 이미지 품질. 예를 들어 뇌 이미징, Lazebnik 그 외 여러분 의 맥락에서 7 양 포 르 말린 고정 뇌 평가 하는 사용 새로운 3D 미스터 등록 방법; 마찬가지로, 최 외. 11 씨의 등록 및 고정된 올빼미 원숭이 두뇌의 가벼운 현미경 이미지에 대 한 절차를 조사. 폴 리 비닐 알코올 (PVA) 뇌 팬텀9에서 개발 및 복합 이미지 인수 (즉 씨, 미국, 그리고 단층) 공유 이미지 데이터 집합12 등록 테스트용 생성을 수행 하는 데 사용 하 고 이미징 알고리즘입니다.
전반적으로, 이러한 연구 확인 이미지 인수에 대 한 현실적인 목표를 사용 하 여 실제로 필수적인 단계는 새로운 이미징 기술 개발 하는 동안. 아직 프로토 타입 단계에서에서 이며 광범위 하 고 재현 가능한 모든 디자인의 정확 하 게 조정할 시간이 지남에 테스트는이 문서에 소개 된 CMUT 미국 프로브 처럼 새로운 이미징 장치를 설계할 때이 더욱 중요 한 단계를 나타냅니다. 그것의 최종 실현 및 애플리케이션에서 vivo에서 (13,,1415)로 가능한 유효성 검사 하기 전에 매개 변수.
이 작업에 설명 된 실험 프로토콜 따라서 CMUT 기술을 기반으로 새롭게 개발 된 미국 프로브에 대 한 강력 하 고, 응용 프로그램별 이미징 평가 절차를 제공 하기 위해 설계 되었습니다. 리얼리즘과 반복성, 소를 보장 하기 위해 포 르 말린에 고정 (표준 음식-상업 공급망을 통해 얻은) 두뇌 이미징 대상으로 선정 됐다. 고정 절차 만족 형태학 자질과 미국에 미스터16,17이미징 가시성 속성을 유지 하면서 조직 특성의 장기 보존을 보장 합니다.
미국 이미지 품질의 평가 대 한 프로토콜 구현 기능 신경외과15사용 하는 neuronavigation 기법에서 빌려도 여기 설명 합니다. 이러한 접근에 미국 프로브 공간 위치 및 방향 데이터 실시간으로 제공 하는 시스템을 추적 하는 모션에 연결 됩니다. 이 방법에서는, 미국 이미지 외과 활동 동안 수 수 자동으로 등록 및 지도, 환자의 두뇌의 pre-operatory 씨 이미지에 중첩에서에 대 한 시각. 제시 프로토콜의 목적을 위해 (이 뇌 이미징에서 골드 표준으로 간주 됩니다) 씨 이미지와 중첩은 큰 가치 이기 때문에 시각적으로 평가 하기 위해 인간의 전문가 형태학 수 조직 기능에서 인식할 수 있는 미국 이미지와, 부 반대, 유물 이미지의 존재를 인식 하.
이미지 다른 미국 프로브 인수를 비교 하는 가능성도 더 재미 있게 된다. 실험 프로토콜 제시 미스터 이미지의 예비 육안 검사에서 확인 된 가장 기능이 풍부한 볼륨 영역에 초점을 맞춘 미국 인수에 대 한 공간 참조 포즈의 집합을 정의 하는 가능성을 포함 합니다. Paraview 오픈 소스 소프트웨어 시스템18개발 통합된 비주얼 도구, 미국 이미지 수집 단계 동안 이러한 미리 정의 된 포즈를 일치에 대 한 운영자에 게 지침을 제공 합니다. 프로토콜에 필요한 교정 절차에 대 한 명확한 공간 참조를 제공 하는 미리 정의 된 위치 랜드마크 모든 대상 표본-생물 학적 또는 합성-장비에 기본적 이다. 이러한 랜드마크 미국와 미스터 모두 이미지에 표시 및 측정 시스템을 추적 하는 모션에 물리적으로 액세스할 수 있어야 합니다. 실험을 위해 선택한 랜드마크 요소는 플린트 유리, 미국 및 씨 이미지에 그 시정 문학19 에서 설명 되었고 예비 미국과 미스터 검사 제시 실험 수행에 의해 확인의 작은 분야입니다.
제시 하는 프로토콜에 의존 초음파 플랫폼 오픈 고급 (울 라-OP)20, 완전 하 고 개방 연구 및 개발 시스템 우리에 게 많은 넓은 실험 가능성 보다 상업적으로 사용할 수를 제공 하는 이미지 수집 스캐너 그리고 다른 미국 프로브의 평가 대 한 일반적인 기준으로.
첫째,이 작품에 사용 하는 악기 설명, 새로 설계 된 CMUT 프로브에 대 한 특정 참조와 함께 합니다. 실험 프로토콜은 소개duced에서 초기 디자인 시스템 보정, 이미지 수집 및 후 처리 관련된 모든 절차의 철저 한 설명과 함께 자세히. 마지막으로 얻은 이미지를 제시 하 고 결과,이 작품의 미래 발전에 대 한 힌트와 함께 설명.
계측
CMUT 프로브 프로토 타입
실험은 새로 개발된 된 256 요소 CMUT 선형 배열 프로토 타입, 설계, 조작, 및 로마 트 레 대학 (로마, 이탈리아)의 Acoustoelectronics 연구소 (ACULAB)에서 포장 CMUT 리버스 제조 공정 (를 사용 하 여 실시 했다 RFP)4. RFP는를 제작 하 여 포장 기술, 특히 이미징 응용 프로그램, 그것에 의하여 CMUT 미세 실리콘 다음에 가공은 우리를 위해 MEMS 센서의 실현에 대 한 잉태는 “거꾸로”21. 다른 CMUT 제조 기술에 비해 RFP 전체 배열 CMUT 세포의 기하학의 높은 균일성 때문 이미징 성능이 향상된 하 고 프로브 헤드 패키지에서 음향 설계 자료를 사용 하 여 생성합니다. RFP의 중요 한 특징은 전기 상호 패드 2 차원 배열 및 프런트 엔드 다중 채널 전자의 3 차원 통합 용이 CMUT 다이의 뒤쪽 부분에 있습니다.
256 요소 CMUT 배열이 7.5 mhz 중심 주파수 대역에서 동작 하도록 설계 되었다. 200 µ m의 요소 피치 51.2 m m의 최대 시야의 폭 인 배열에 대 한 선정 되었습니다. 단일 CMUT 배열 요소의 높이 측면 해상도와 침투 기능 적당 한 성능을 달성 하기 위해 정의 되었다. 5mm 배열 요소 높이 음향 렌즈에 의하여 18 m m의 깊이에서 상승 초점을 고칠 때 0.1 m m의 3db 빔 폭과 7.5 m h z에서 1.8 m m의 초점의 3db 깊이 얻기 위하여 선택 되었다. 195 µ m 전체 배열 요소는 배열 및 전기 6 각형 레이아웃에 따라 병렬 344 원형 CMUT 셀에 연결 하 여 얻은 했다. 따라서, 결과 5 µ m 요소-거리, 즉 절단, 멤브레인 막 분리와 일치합니다. CMUT 배열의 구조의 도식 대표는 그림 1에서 보고 됩니다.
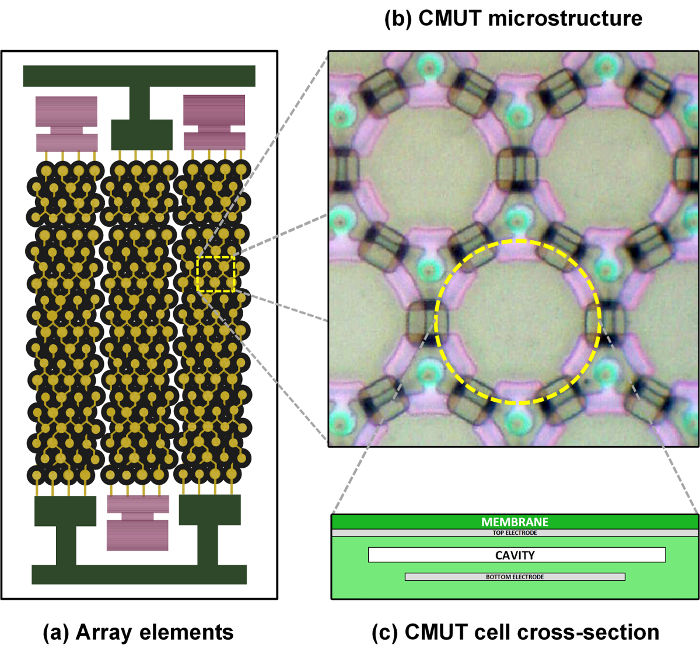
그림 1: CMUT 배열 구조. CMUT 배열의 구조의 도식 표현: 배열 여러 셀에 병렬 (a)의 CMUT 미세 (b); 레이아웃 연결의 구성 요소 CMUT 셀 (c)의 단면입니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
CMUT 소 매개 변수, 즉 는 측면 및 수직 치수의 판과 전극, 특징으로 광대역 집중 작업 달성의 목표와 유한 요소 모델링 (FEM) 시뮬레이션을 사용 하 여 정의 된 한 7.5 m h z와 100%-6 dB 양방향 분수 대역폭 중심 주파수 응답. 구멍, 즉, 간격, 높이 80 V 최대 여기 신호 전압을 고려 하는 붕괴 전압4의 70%에서 CMUT를 바이어 싱 하 여 양방향 감도 극대화 하기 위해 V 260의 붕괴 전압을 달성 하기 위해 정의 되었다. 표 1 ﹙ CMUT의 주요 기하학 매개 변수를 요약합니다.
| CMUT 배열 설계 매개 변수 | |
| 매개 변수 | 값 |
| 배열 | |
| 요소 수 | 256 |
| 요소 피치 | 200 µ m |
| 요소 길이 (높이) | 5 mm |
| 고정된 높이 초점 | 15 m m |
| CMUT 미세 | |
| 세포 직경 | 50 µ m |
| 전극 직경 | 34 µ m |
| 셀 측면 거리 | 7.5 µ m |
| 판 두께 | 2.5 µ m |
| 갭 높이 | 0.25 µ m |
표 1입니다. CMUT 프로브 매개 변수. CMUT 선형 배열 조사 및 CMUT 세포 미세 형상 매개 변수.
CMUT 배열 프로브 헤드에 통합 하는 데 사용 하는 포장 과정 참조4에 설명 되어 있습니다. 음향 렌즈는 금속-산화물 nanopowders와 실수로 실 온 타이어 (RTV) 실리콘 고무를 사용 하 여 물의 음향 임피던스 일치 인터페이스22가짜 반사 방지를 조작 했다. 결과 화합물 1280 k g/m3 의 밀도 1100 m/s의 소리의 속도 의해 특징 했다. 원통형 렌즈, 18 m m의 기하학적 초점 및 변환기 표면 위에서 약 0.5 m m의 최대 두께 7mm 곡률 반경 선택 되었다. CMUT 프로브 헤드의 그림은 그림 2(a)에 표시 됩니다.
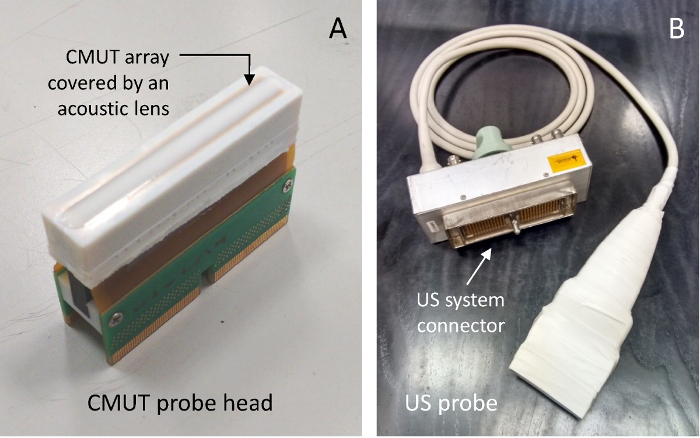
그림 2: 프로브 CMUT. 선형 배열 변환기 및 음향 렌즈 (a)를 포함 하 여 개발 된 CMUT 프로브 및 전체 CMUT 프로브와 커넥터 (b)의 머리. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
CMUT 프로브 헤드 멀티 채널 수신 아날로그 프런트 엔드 전자 및 미국 스캐너에 연결에 대 한 다중 케이블 포함 된 프로브 핸들에 결합 했다. 단일 채널 전자 회로 전기 현재 필요한 케이블 임피던스를 제공 하는 높은 입력 임피던스 9 dB 이득 전압 증폭기 이다. 참조 4에 설명 된 멀티 채널 전자, 초 저전력 저 잡음 수신기와 신호 전송/수신 듀플렉싱에 대 한 통합된 스위치를 포함 하 여 회로 토폴로지를 기반으로 합니다. 프런트 엔드 전자 전원 공급 장치 CMUT 바이어스 전압은 사용자 지정 전원 공급 장치에 의해 생성 되 고 극 케이블을 통해 조사에. 완전 한 조사는 그림 2(b)에 표시 됩니다.
압 전 미국 프로브
CMUT 프로브로 얻은 이미지의 질적 비교에 대 한위의 두 상용 압 전 미국 프로브는 실험에 포함 됐다. 첫 번째 요소, 245 µ m 피치 및 8 MHz에서 중심으로 110% 소수 대역폭 시험 192 선형 배열 조사 이다. 이 프로브는 2D B 모드 이미지 사용 되었다. 두 번째 프로브는 기계적으로 스윕 선형 배열 요소, 245 μ m의 피치와 100% 분수 대역폭 가운데 8.5 m h z에 시험 하는 180의 3D 영상에 대 한 조사 이다. 스테퍼 모터 프로브 수 있습니다 스캔된 볼륨23의 3D 이미지를 재구성 하는 데 사용할 수 있습니다 여러 비행기를 얻으려고 선형 배열 연소 주택 내부에 배치.
울 라 OP 시스템
미국 이미지의 인수는 울 라 OP 시스템20, 완전 하 고 열려 미국 연구 및 개발 시스템, 설계 및 마이크로 시스템 디자인 연구소 피렌체, 이탈리아의 대학의 실현을 사용 하 여 수행 되었다. 울 라 OP 시스템 제어할 수 있습니다, 전송 (TX)에 둘 다 그리고 64 독립적 채널 수신 (RX)에 연결 된 스위치 매트릭스를 통해 한 미국 조사 최대 192 압 전 또는 CMUT 변환기. 시스템 아키텍처 기능 2 주 처리 보드, 아날로그 보드 (AB)와 디지털 보드 (DB), 랙, 포함 된 모두 전원 보드와 프로브 커넥터 및 모든 내부 라우팅을 포함 하는 다시 비행기 보드에 의해 완료 되는 구성 요소입니다. AB 포함 프런트 엔드 프로브 트랜스듀서를 특히 64 채널 및 프로그래밍 가능 스위치 매트릭스 동적 TX RX 채널에 매핑되는 변환기의 아날로그 컨디셔닝에 대 한 전자 부품. DB는 실시간 빔 형성 담당, TX 신호를 합성 하 고 RX를 처리 (예를 들어 B 모드 이미지 또는 도플러 초음파) 원하는 출력을 생성 하 재 탕. 그것은 울 라 OP 시스템은 완벽 하 게 구성, 따라서 tx에서 신호 최대 시스템 대역폭 (예: 3 레벨 펄스, 사인파 버스트, 울 어, 허프만 코드, 등) 내에서 어떤 임의 파형 수 강조 가치가 있다 180 Vpp;의 진폭 또한, 빔 형성 전략 최신 초점 패턴 (예: 집중 파, 라인 전송, 평면 파, 분기 파도, 제한 된 회절 빔, 등)에 따라 프로그래밍 될 수 있다24,25 . 하드웨어 수준에서 이러한 작업은 5 개의 필드 프로그래머블 게이트 어레이 (Fpga)와 1 개의 디지털 신호 프로세서 (DSP) 간에 공유 됩니다. 기계적으로 스윕 3d 이미징 프로브, 위에서 설명한 것과 같은 울 라 OP 시스템 또한 변환기 배열의 각 위치에 개별 2D 프레임의 동기화 된 수집에 대 한 조사, 내부 스테퍼 모터를 제어 합니다.
울 라 OP 시스템 실행 시 다시 구성 하 고 다른 미국 프로브에 맞게 수 있습니다. 특정 소프트웨어 도구를 갖춘 호스트 컴퓨터와 USB 2.0 채널을 통해 통신 합니다. 후자는 미국 이미지, 다양 한 모드;에서 재건의 실시간 시각화를 제공 하는 구성 가능한 그래픽 인터페이스 체적 프로브, 예를 들어, 스캔 한 볼륨에 수직 비행기의 2 개의 B 모드 이미지 표시할 수 있습니다 실시간으로.
설명된 프로토콜의 목적을 위해 울 라-OP 시스템의 주요 장점은 TX RX 매개 변수는 쉽게 튜닝 수 처리 체인26, 또한 가능 하 게 하에 각 단계에서 수집 된 신호 데이터에 대 한 전체 액세스를 제공 합니다. 새로운 이미징 형식 및 빔 형성 기법27,,2829,30,31,32,33테스트 하.
모션 추적 시스템
이미지 수집 동안 위치 기록 미국 조사, 추적 시스템 광학 모션 고용된34. 시스템 기반으로 센서 단위 2 조명 (발광 다이오드 (Led)) 기를 통해 적외선을 방출 하 고 두 수신기 (즉 렌즈와는 전 하 결합 소자 (CCD))를 사용 하 여 여러 목적 수동 반영 하는 빛을 감지 하 마커 미리 정의 된 엄밀한 모양에서 배열입니다. 반사 된 빛에 대 한 내용은 다음 USB 2.0을 통해 연결 된 호스트 컴퓨터로 옮겨질 수 있다 위치 및 방향 데이터를 계산 하는 내장 된 CPU에 의해 처리 됩니다. 센서 단위의 구성을 제어 하는 동일한 링크를 사용할 수 있습니다.
센서 단위 도구 세트와 함께, 각각 엄격한 기하학적 구성에 배열 하는 4 개의 반사 마커 부여. 모션 추적 시스템 약 20 Hz의 작동 주파수에서 동시에 최대 6 개의 개별 엄밀한 도구를 추적할 수 있습니다. 이러한 두 도구는 이러한 실험을 위해 사용 했다: 포인터 도구, 팁에 의해 감동 3D 위치를 확보 수, 및 클램프 장착 도구, 미국 프로브 아래에 첨부할 수 있는 테스트 ( 그림 14참조).
소프트웨어 측면에서 모션 추적기는 두 장치 제어 및 데이터 수집, USB를 통해 액세스할 수 있는 낮은 수준의 직렬 응용 프로그램 프로그래밍 인터페이스 (API)를 갖추고 있습니다. 기본적으로 위치와 방향으로 반환 됩니다 다중 항목 항목, 즉 각 도구 추적 되 고 하나의 항목. 각 항목에는 mm로 표시 한 3 차원 위치 (x, y, z)와 4 원수로 방향을 (q0, qx, qy, qz) 포함 되어 있습니다. 시스템 시각화 및 위치/방향 센서 단위의 시야 내에서 여러 도구를 실시간으로 측정 하기 위한 그래픽 추적 도구를 포함 하는 상위 소프트웨어 악기의 도구 상자와 함께 또한 온다.
시스템 개요, 통합, 및 소프트웨어 구성 요소
그림 3 의 다이어그램에는 또한 설명 하는 시스템에서 흐르는 데이터 스트림 프로토콜 채택 계측 요약 되어 있습니다.
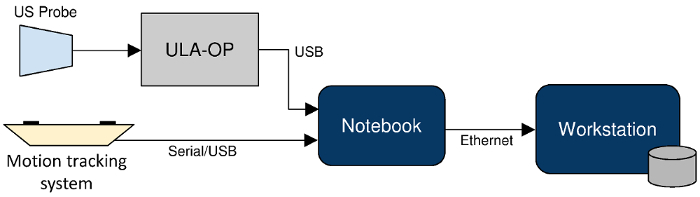
그림 3: 블록 다이어그램 전체 하드웨어 설정 및 시스템 통합의. 미국 조사와 미국 이미지 수집을 위한 노트북 USB를 통해 통신 하는 울 라 OP 시스템에 연결 됩니다. 같은 시간에 노트북은 또한 모션 추적 위치 데이터 수집을 위한 시스템에 USB를 통해과 데이터 처리를 위해 워크스테이션에 이더넷 통해 연결 됩니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
미국 프로브, 모션 추적기 및 위에서 설명한 되었습니다, 울 라 OP 시스템 설치 또한 두 대의 컴퓨터, 즉 노트북과 워크스테이션을 포함 합니다. 전은 주요 계측, 수신 및 두 개의 주요 들어오는 데이터 스트림을 동기화 프런트 엔드: 울 라 OP 시스템 및 3D 모션 추적기에서 데이터를 위치에서 나오는 미국 이미지. 그것은 또한 제공 한다 시각적 피드백을 연산자에 인수 되 고 이미지. 워크스테이션에는 실질적으로 더 높은 계산 능력과 저장 용량. 이미지 후 처리와 결합 된 이미징 데이터 집합에 대 한 저장소에 대 한 백엔드 지원을 제공합니다. 워크스테이션도 사용미국 및 그 이미지의 시각화에 대 한 등록 된 멀티 모달 이미지의 동시 3D 시각화의 가능성을 포함 하 여.
이미지 수집 실험에 대 한 중요 한 요구 사항은 두 가지 기본 데이터 스트림 동기화입니다. 동작 추적 및 울 라 OP 시스템은 아직 활동의 명시적 동기화를 지원 하지 않는 독립적인 계기 이다. 이 때문에, 미국 이미지 데이터와 위치 정보를 제대로 각 이미지 조각 획득 당시 미국 탐사선의 정확한 3D 위치를 검출 하기 위하여 결합 될 필요가 있다. 이 목적을 위해 특정 로깅 응용 프로그램 개발 되었습니다 녹화 및 실시간으로 타임 스탬프에 대 한 자체 모션 추적기에서이 경우에 포함 된 c + + 소프트웨어 구성 요소를 수정 하 여 추적 시스템, 모션에 의해 제공 하는 데이터. 일반적으로, 모션 추적 시스템 기능을 실시간으로 데이터를 캡처하고 파일에 그들을 베 끼는 것을 허용 하는 하위 수준 API.
채택 된 동기화 방법은 다음과 같이 작동합니다. 로깅 응용 프로그램에 의해 생성 되는 파일의 각 항목은 어디 “yyyy-MM-ddThh:mm:ss.kkk” 형식의 타임 스탬프와 함께 증강: y = 년, M = 월, d = 일, h = 시간, m = 분, s = 2, k = 밀리초. 울 라 OP PC 기반 소프트웨어 (c + + 및 MATLAB 프로그래밍 언어) 시작 및 끝 각 이미지 수집 시퀀스의 시간을 계산 하 고.vtk 형식으로 각 이미지에이 정보를 저장. 실험 중 일반적인 임시 참조를 제공 하 두 위의 소프트웨어 절차는 그림 3에서 프런트 엔드 컴퓨터에서 실행 됩니다. 이 방법으로 생산 하는 타임 스탬프 최종 데이터 집합을 생성 하는 후 처리 소프트웨어 절차에 의해 사용 됩니다 (프로토콜, 제 8 항 참조).
다른 특정 소프트웨어 구성 요소는 실현 되었고 현재 미국 프로브 위치 씨 이미지 하 고, 특히, 미리 정의 된 포즈의 집합에 관련 된 여는 연산자를 실시간 피드백을 제공 하는 워크스테이션에서 실행. 파이썬에서 서버-사이드 소프트웨어 루틴 모션 추적 로그 파일 처리, 미국 프로브 기하학적 모양과 보냅니다 Paraview 서버에 데이터에 위치 하는 전류를 변환. Paraview 클라이언트 씨 이미지와 더 기 하 도형을 설명 하는 미리 정의 된 포즈를 겹쳐 기하학적 도형의 위치 같은 Paraview 서버와 실시간 표시에 연결 합니다. 결과 실시간 시각화의 예는 그림 17에 표시 됩니다.
