Der wachsende Markt für kleine und tragbare Ultraschall (US) Scanner führt zu die Entwicklung von neuen Echographische Sonden in welchem Teil des Signal-Konditionierung und Beamforming Sondengriff, vor allem für 3D/4D Bildgebung Elektronik integriert ist 1. auftauchende Technologien besonders geeignet, um dieses hohe Maß an Integration zu erreichen gehören Micromachined Ultraschallwandler (MUTs)2, eine Klasse von Micro Electro-Mechanical System (MEMS) Wandler auf Silizium hergestellt. Insbesondere haben kapazitive MUTs (CMUTs) endlich eine technologische Reife erreicht, die macht sie eine gute Alternative zum piezoelektrischen Aufnehmer für die nächste Generation Ultraschall bildgebende Systeme3. CMUTs sind sehr ansprechend durch ihre Kompatibilität mit Mikroelektronik Technologien, hoher Bandbreite – wodurch eine höhere Bildauflösung – hohen thermischen Wirkungsgrad erzielt und vor alle, hohe Empfindlichkeit4. CMUT Sonden werden im Rahmen des Projekts ENIAC JU DeNeCoR (Geräte für NeuroControl und NeuroRehabilitation)5entwickelten6 für US-Brain imaging-Anwendungen (z.B. Neurochirurgie), wo qualitativ hochwertige 2D/3D/4D Bilder und genaue Darstellung der Hirnstrukturen sind erforderlich.
In den Entwicklungsprozess der neuen US-Sonden ist die Möglichkeit der Durchführung frühe Beurteilung der Abbildungsleistung von grundlegender Bedeutung. Typische Bewertung Techniken beinhalten bestimmte Parameter wie Auflösung und Kontrast, basierend auf Bildern des Gewebes imitiert Phantome mit embedded-Zielgeräte bekannter Geometrie und Echogenicity zu messen. Realistischer Analyse mit anwendungsspezifischen bildgebenden Ziele kann für eine frühzeitige Bewertung der erwarteten Leistung der US-Sonden in ihre mögliche Anwendung auf einen bestimmten klinischen Bereich sehr wertvoll sein. Auf der anderen Seite die komplette Wiederholbarkeit von Akquisitionen ist grundlegend für vergleichende Tests von verschiedenen Konfigurationen im Laufe der Zeit, und diese Anforderung herrscht in Vivo Experimente zusammen.
Mehrere Werke in der Literatur über diagnostische bildgebende Verfahren vorgeschlagen, die Verwendung von ex-Vivo Tierpräparate7, Kadaver Gehirne8oder Gewebe imitiert Phantome9 für verschiedene Zwecke10, darunter die Prüfung von bildgebenden Verfahren, Anmeldung Algorithmen, Magnetresonanz (MR)-Sequenzen oder die US-Lichtverteilung und daraus resultierenden Bildqualität. Zum Beispiel im Rahmen der Bildgebung des Gehirns, Lazebnik Et al. 7 verwendet Formalin fixiert Schaf Gehirn, um eine neue 3D Herr Registrierung Methode zu bewerten; in ähnlicher Weise Choe Et al. 11 untersucht ein Verfahren für die Registrierung von Herr und lichtmikroskopische Bilder eines festen Eule Affen Gehirns. Polyvinylalkohol (PVA) Gehirn phantom wurde in9 entwickelt und verwendet, um multimodale Bild Akquisitionen (d. h. Herr, den USA und Computertomographie), ein gemeinsames Bild Dataset12 für die Prüfung der Anmeldung generieren durchzuführen und Imaging-Algorithmen.
Insgesamt bestätigen diese Studien, dass die Verwendung von ein realistisches Ziel für Bild Übernahmen in der Tat ein wesentlicher Schritt bei der Entwicklung einer neuen bildgebenden Technik ist. Dies entspricht noch kritischer frühzeitig, wenn Sie entwerfen ein neue imaging-Gerät, wie die CMUT uns Sonde präsentiert in diesem Papier, das noch in einer Prototyp-Phase und benötigt umfassende und reproduzierbare Tests im Laufe der Zeit für eine genaue Abstimmung der ganzen Konstruktion Parameter vor seiner endgültigen Verwirklichung und mögliche Validierung in in-Vivo Anwendungen (wie in13,14,15).
In dieser Arbeit beschriebenen experimentellen Protokolls wurde so entwickelt, um eine robuste, anwendungsspezifische bildgebenden Bewertungsverfahren für neu entwickelte US-Sonden basierend auf CMUT Technologie bieten. Um Realismus und Wiederholbarkeit, Rinder zu gewährleisten wurden Gehirne (gewonnen durch die standard-Versorgung mit Lebensmitteln Handelskette) in Formalin fixiert als imaging Ziele gewählt. Die Fixierung gewährleistet langfristige Erhaltung der Gewebeeigenschaften unter Beibehaltung befriedigende morphologische Eigenschaften und Sichtbarkeitseigenschaften in USA und MR-Bildgebung16,17.
Das Protokoll für die Beurteilung der Bildqualität US beschrieben hier auch implementiert ein Feature Neuronavigation Techniken für Neurochirurgie15entlehnt. Solche Ansätze sind US-Sonden verbunden ein Motion-tracking-System, das räumliche Position und Ausrichtung von Daten in Echtzeit bietet. Auf diese Weise können US-Aufnahmen bei chirurgischen Aktivitäten automatisch registriert und visualisiert, um Führung in Überlagerung zu pre-operatory MRT-Bilder von das Gehirn des Patienten. Für die Zwecke des vorliegenden Protokolls ist die Überlagerung mit MRT-Bilder (die als der Goldstandard in der Bildgebung des Gehirns angesehen werden) von großem Wert, da es ermöglicht menschliche Experten visuell beurteilen die morphologischen und Gewebe Merkmale erkennbar in sind die US-Bilder und Vice Versa, das Vorhandensein von imaging-Artefakte zu erkennen.
Noch interessanter wird die Möglichkeit, Aufnahmen mit verschiedenen US-Sonden zu vergleichen. Die experimentelle Protokoll präsentiert beinhaltet die Möglichkeit, eine Reihe von Raumbezug posiert für US-Akquisitionen, konzentrierte sich auf die funktionsreichste Volumenbereiche identifiziert in einer vorläufigen Sichtprüfung der MRT-Bilder definieren. Ein integrierte visuelles Werkzeug, entwickelt für die Paraview open-Source Software System18, bietet Anleitungen für Betreiber für den Abgleich dieser vordefinierten Posen in US Bild Erwerb Phasen. Für die Kalibrierungsverfahren durch das Protokoll ist es unerlässlich, alle Ziel-Proben – biologischen oder synthetischen – mit vordefinierten Position Sehenswürdigkeiten ausstatten, die eindeutige räumliche Bezüge zur Verfügung zu stellen. Sehenswürdigkeiten sein in USA und Herr Bilder sichtbar und für Messungen mit der Motion-tracking-System physisch zugänglich. Die gewählte Wahrzeichen Elemente für das Experiment sind kleine Kugeln von Weißglas, deren Sichtbarkeit in USA und Herr Bilder war in der Literatur19 demonstriert und durch vorläufige USA und Herr Scans ausgeführt, bevor die vorgestellten Experimente bestätigt.
Das Protokoll präsentiert stützt sich auf Ultraschall Advanced öffnen Platform (ULA-OP)20, eine vollständige und offene Forschung und Entwicklungssystem für uns Bildaufnahme, bietet viel breitere experimentellen Möglichkeiten als kommerziell zur Verfügung Scanner und dient als gemeinsame Basis für die Bewertung der verschiedenen US-Sonden.
Zunächst sind die in dieser Arbeit verwendeten Instrumente mit besonderem Bezug auf die neu gestaltete CMUT Sonde beschrieben. Das experimentelle Protokoll ist introduced im Detail, mit einer gründlichen Beschreibung aller Beteiligten, vom ersten Entwurf zur Kalibrierung des Systems, zur Bildaufnahme und Post-Processing Verfahren. Zu guter Letzt die erhaltenen Bilder präsentiert werden und die Ergebnisse werden diskutiert, sowie Hinweise auf zukünftige Entwicklungen dieser Arbeit.
Instrumentierung
CMUT Sonde Prototyp
Die Experimente wurden mit neu entwickelten 256-Element CMUT linear-Array Prototyp entworfen, hergestellt und verpackt in Acoustoelectronics Labor (ACULAB) der Universität Roma Tre (Rom, Italien), mit den Fertigungsprozess CMUT umkehren (durchgeführt RFP)4. RFP ist ein Microfabrication und Verpackungstechnik, speziell konzipiert für die Realisierung von MEMS Sensoren für uns imaging-Anwendungen, wobei die CMUT Mikrostruktur auf Silizium hergestellt ist ein “Upside-Down” Ansatz21. Im Vergleich zu anderen CMUT Fertigungstechnologien ergibt RFP verbesserte Abbildungsleistung durch die hohe Gleichmäßigkeit der CMUT Zellen Geometrie über das gesamte Array und akustisch entwickelten Materialien in die Sonde Kopf Paket. Ein wichtiges Merkmal des RFP ist, dass die elektrische Zusammenschaltung Pads befinden sich auf dem hinteren Teil der CMUT sterben, was die 3D-Integration von 2D Arrays und Front-End-Mehrkanal-Elektronik erleichtert.
Das Array mit 256 Elementen CMUT wurde entwickelt, um in einem Frequenzband mit 7,5 MHz zentriert zu betreiben. Eine Element-Pitch von 200 µm wurde für das Array, was zu einer Maximalbreite von Field-of-View von 51,2 mm gewählt. Die Höhe der einzelnen CMUT Arrayelemente wurde definiert, um geeignete Leistung in Bezug auf die laterale Auflösung und Penetration Fähigkeit zu erzielen. Eine Array Element Höhe 5 mm wurde gewählt, um eine-3 dB Strahlbreite von 0,1 mm und einer-3 dB Tiefenschärfe von 1,8 mm bei 7,5 MHz, bei der Festsetzung des Höhe Fokus in einer Tiefe von 18 mm durch eine akustische Linse. 195 µm-weite Array-Elemente wurden durch die Anordnung und elektrisch anschließen in parallele 344 kreisförmigen CMUT Zellen, nach einem sechseckigen Layout erhalten. Folglich entspricht der resultierenden 5 µm Element zu Element Abstand, d. h. der Schnittfuge, die Membran zu Membran-Trennung. Eine schematische Darstellung der Struktur eines CMUT Arrays ist in Abbildung 1gemeldet.
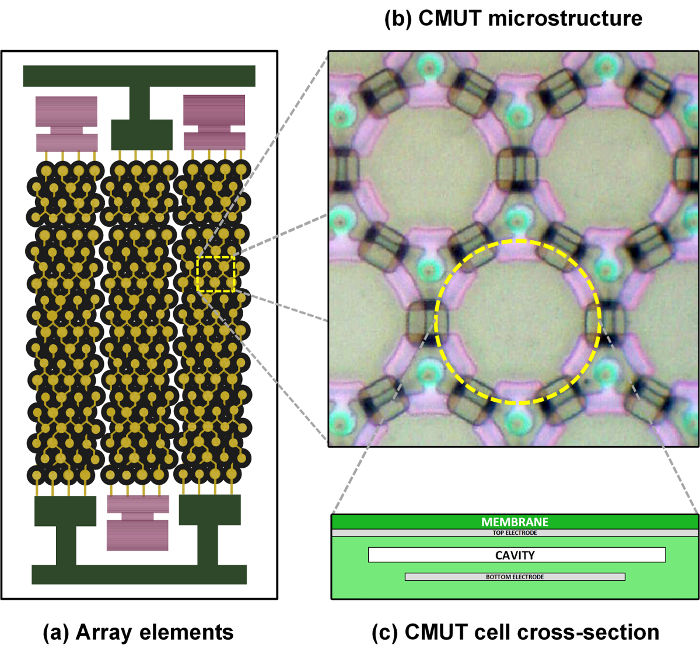
Abbildung 1: CMUT Arraystruktur. Schematische Darstellung der Struktur eines CMUT Arrays: array-Elemente, bestehend aus mehreren Zellen verbunden in parallel (a), Layout der CMUT Mikrostruktur (b); Querschnitt einer CMUT Zelle (c). Bitte klicken Sie hier für eine größere Version dieser Figur.
CMUT Microfabrication Parameter, d.h. die laterale und vertikale Dimensionen der Platte und Elektroden, wurden definiert, mit Hilfe von Finite Element Modeling (FEM) Simulationen mit dem Ziel eine Breitband-eintauchen-Betrieb zeichnet sich durch eine Frequenzgang bei 7,5 MHz und eine 100 %-6 dB Zweiwege-gebrochene Bandbreite zentriert. Die Höhe des Hohlraums, d. h. die Lücke wurde definiert, um einen Zusammenbruch Spannung von 260 V, die zwei-Wege-Empfindlichkeit, zu maximieren durch Vorspannen der CMUT bei 70 % der Zusammenbruch Spannung4, unter Berücksichtigung einer 80 V maximale Erregung Signalspannung zu erreichen. Tabelle 1 fasst die wichtigsten geometrischen Parameter der Microfabricated CMUT.
| CMUT Array Design-Parameter | |
| Parameter | Wert |
| Array | |
| Anzahl der Elemente | 256 |
| Element-pitch | 200 µm |
| Elementlänge (Höhe) | 5 mm |
| Feste Höhe Fokus | 15 mm |
| CMUT Mikrostruktur | |
| Durchmesser der Zelle | 50 µm |
| Elektrodendurchmesser | 34 µm |
| Seitenabstand von Zelle zu Zelle | 7.5 µm |
| Blechdicke | 2,5 µm |
| Lücke-Höhe | 0,25 µm |
Tabelle 1. CMUT Sonde Parameter. Geometrische Parameter des CMUT linear-Array Sonde und CMUT Zelle Mikrostruktur.
Referenz4beschreibt der Verpackungsprozess CMUT Arrays in einem Messkopf integriert. Die akustische Linse wurde hergestellt mit einer Raumtemperatur vulkanisiert (RTV) Silikon-Kautschuk mit Metall-Oxid-Nanopulver dotiert entsprechen die akustische Impedanz von Wasser und vermeiden unechte Reflexionen an der Schnittstelle22. Die daraus resultierende Verbindung war geprägt von einer Dichte von 1280 kg/m3 und eine Schallgeschwindigkeit von 1100 m/s. Eine 7 mm Krümmungsradius wurde für die Zylinderlinse, führt zu einer geometrischen Schwerpunkt von 18 mm und einer maximalen Dicke von ca. 0,5 mm über dem Wandler gewählt. Ein Bild von der CMUT Messkopf wird in Abbildung 2(a)angezeigt.
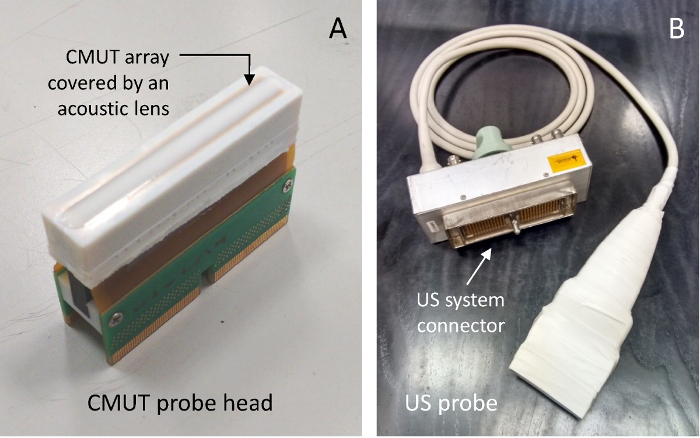
Abbildung 2: CMUT Sonde. Leiter der entwickelten CMUT Sonde, einschließlich die lineare Anordnung der Wandler und akustische Linse (a), und die volle CMUT Sonde mit Stecker (b). Bitte klicken Sie hier für eine größere Version dieser Figur.
Der Messkopf CMUT wurde an der Sondengriff mit Mehrkanal-Empfang analoger Front-End-Elektronik und einen mehrpoligen Kabel für den Anschluss an die US-Scanner gekoppelt. Die einkanalige elektronische Schaltung ist eine hohe Eingangs-Impedanz 9 dB Gain-Spannung Verstärker, der elektrische aktuelle notwendig, um die Kabel-Impedanz fahren bietet. Die Mehrkanal-Elektronik, beschrieben in Referenz 4, basiert auf einem Schaltungstopologie einschließlich einen ultra-low-Power-geräuscharm-Empfänger und eine integrierte Schalter für das senden/empfangen Signal Duplexdruck. Die Front-End-Elektronik-Stromversorgung und die CMUT Vorspannung sind durch eine benutzerdefinierte Netzteil erzeugt und der Sonde durch das mehrpoligen Kabel zugeführt. Die komplette Sonde ist in Abbildung 2(b)dargestellt.
Piezoelektrische US-Sonden
Für einen qualitativen Vergleich der Bilder erhalten, mit der CMUT Sondeoben wurden zwei handelsübliche piezoelektrische US-Sonden in den Experimenten. Die erste ist eine linear-Array-Sonde mit 192 transducing Elemente, eine 245 µm Tonhöhe und eine 110 % gebrochene Bandbreite 8 MHz zentriert. Diese Sonde wurde verwendet, um 2D B-Mode-Bilder zu erwerben. Die zweite Sonde ist eine Sonde für 3D-Bildgebung mit einer mechanisch gefegt linearen Anordnung von 180 transducing Elemente, mit einem 245 µm Sitzabstand und ein 100 % gebrochene Bandbreite bei 8,5 MHz zentriert. Ein Schrittmotor platziert im Inneren der Sonde Gehäuse ermöglicht fegen das lineare-Array um mehrere Ebenen zu erwerben, die verwendet werden, um ein 3D-Bild der gescannten Volume23zu rekonstruieren.
ULA-OP-System
Der Erwerb von US-Bilder erfolgte durch den Einsatz der ULA-OP System20, die einen vollständigen und offenen US Forschung und Entwicklung-System, konzipierte und realisierte die Mikroelektronik Systeme Design Laboratory der Universität Florenz, Italien. ULA-OP-System kontrollieren kann, sowohl bei der Übertragung (TX) und Empfang (RX), bis zu 64 unabhängige Kanäle verbunden durch eine Switch-Matrix, eine US-Sonde mit bis zu 192 piezoelektrischen oder CMUT Wandler. Die Architektur bietet zwei wichtigsten Verarbeitung Systemplatinen, ein Analog-Board (AB) und eine digitale Board (DB), beide enthalten in einem Rack, die abgeschlossen sind, durch ein Netzteil und ein Rücken-Flugzeug-Vorstand, die die Sonde Stecker und alle internen routing enthält Komponenten. AB enthält die Front-End für die Sonde Wandler, insbesondere Elektronikkomponenten für analoge Konditionierung von 64 Kanäle und die programmierbare Schalter-Matrix, die dynamisch die TX-RX Kanäle die Wandler zuordnet. Die DB für Echtzeit-Beamforming verantwortlich ist, Echos Synthese der TX-Signale und Verarbeitung der RX um die gewünschte Ausgabe (zum Beispiel B-Modus Bilder oder Doppler Sonogramme) zu produzieren. Es ist hervorzuheben, dass die ULA-OP System ist voll konfigurierbar, damit das Signal in TX kann jede beliebige Wellenform innerhalb der Systembandbreite (z. B. 3-stufigen Impulse, Sinus-Bursts, zwitschert, Huffman-Codes, etc.) mit einer maximalen Amplitude der 180 Vpp; Darüber hinaus die Beamforming Strategie programmiert werden, nach den neuesten Fokussierung Mustern (z.B. konzentriert Welle, multi-line-Übertragung, Ebenen Welle, unterschiedliche Wellen, begrenzte Beugung Balken usw.)24,25 . Auf Hardware-Ebene werden diese Aufgaben von fünf Field Programmable Gate Arrays (FPGAs) und einen digitalen Signalprozessor (DSP) genutzt. Mit mechanisch fegte 3D imaging-Sonden, wie oben beschrieben steuert die ULA-OP auch den Schrittmotor im Inneren der Sonde für die synchronisierte Erfassung von 2D Einzelbilder an jeder Position des Wandler-Arrays.
ULA-OP-System kann zur Laufzeit neu konfiguriert und angepasst an verschiedenen US-Sonden. Es kommuniziert über einen USB 2.0-Kanal mit einem Host-Computer, ausgestattet mit einer spezifischen Software-Tool. Letzteres hat eine konfigurierbare grafische Oberfläche, die Echtzeit-Visualisierung von US-Bildern, rekonstruiert in verschiedenen Modi bietet; mit volumetrischen Sensoren können beispielsweise zwei B-Mode-Bilder von lotrechten Ebenen im gescannten Volumen in Echtzeit angezeigt werden.
Der Hauptvorteil der ULA-OP-System für die Zwecke des Protokolls beschrieben ist, dass es ermöglicht eine einfache tuning der TX-RX-Parameter und vollen Zugriff auf die Signaldaten gesammelt bei jedem Schritt in der Verarbeitung Kette26 bietet, wodurch es auch möglich zum Testen neuer bildgebender Verfahren und Beamforming Techniken27,28,29,30,31,32,33.
Motion-Tracking-system
Datensatz die USA Sonde Position während der Bildaufnahme, eine optischen Motion-tracking-System war beschäftigt34. Das System basiert auf einer Sensoreinheit, die emittiert infrarotes Licht über zwei Illuminatoren (Licht emittierende Dioden (LEDs)) und verfügt über zwei Receiver (d.h. ein Objektiv und ein Charge – Coupled Device (CCD)), das durch mehrere zweckgebundene passiv reflektierte Licht zu erkennen Marker in vordefinierten starren Formen angeordnet. Informationen über reflektierte Licht wird dann verarbeitet durch einen on-Board-CPU, Position und Ausrichtung Daten zu berechnen, die auf einem Host-Computer angeschlossen über USB 2.0 übertragen können. Der gleiche Link lässt sich die Konfiguration der Sensoreinheit steuern.
Die Sensoreinheit Schiffe zusammen mit einer Reihe von Tools, jeweils ausgestattet mit 4 reflektierenden Markierungen in einer starren geometrischen Konfiguration angeordnet. Die Motion-tracking-System kann bis zu sechs verschiedene starre Werkzeuge gleichzeitig, bei einer Frequenz von ca. 20Hz verfolgen. Zwei solche Werkzeuge wurden für diese Experimente verwendet: ein Zeigerwerkzeug, das ermöglicht Erwerb der 3D-Position berührt von seiner Spitze, und ein Klammer ausgestattet-Tool, das die US-Sonde unter befestigt werden kann (siehe Abbildung 14) testen.
Auf der Softwareseite bietet Motion-Tracker eine Low-Level-serielle Programmierschnittstelle (API) für beide Einheit Steuerung und Datenerfassung, das über USB zugegriffen werden kann. Standardmäßig werden Position und Ausrichtung als Multi-Entry-Elemente, d.h. ein Eintrag pro jedes Werkzeug verfolgt zurückgegeben. Jeder Eintrag enthält eine 3D Position (X, y, Z) in mm ausgedrückt und eine Orientierung (Q0, QX, Q,y, Q-Z), ausgedrückt als eine Quaternion. Das System kommt auch mit einer Toolbox übergeordnete Software-Instrumente, umfasst eine grafische Tracking-Tool zur Visualisierung und Messung in Echtzeit die Positionen/Ausrichtung mehrerer Tools in das Blickfeld der Sensoreinheit.
System-Übersicht, Integration und Software-Komponenten
Das Diagramm in Abbildung 3 fasst die Instrumentierung für das Protokoll, beschreiben auch den Datenstrom, der über die Systeme fließt angenommen.
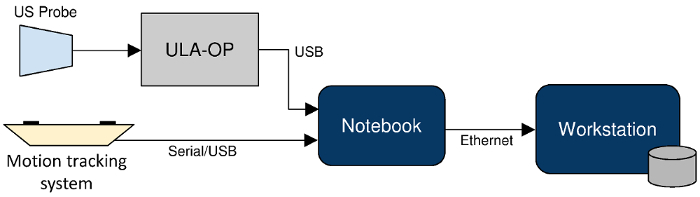
Abbildung 3: Blockschaltbild der gesamten Hardware Setup und System Integration. Die US-Sonde ist mit der ULA-OP-System verbunden, über USB mit dem Notebook für die US-Bildaufnahme kommuniziert. Zur gleichen Zeit ist das Notebook auch über USB, das Motion-tracking-System für Position Data Acquisition und über Ethernet an die Arbeitsstation für die Datenverarbeitung verbunden. Bitte klicken Sie hier für eine größere Version dieser Figur.
Das Setup beinhaltet neben der US-Sonden, Motion-Tracker und die ULA-OP-System, das oben beschrieben wurden, auch zwei Computer, nämlich ein Notebook und einen Arbeitsplatz. Ersteres ist der Front-End für Instrumentierung, empfangen und synchronisieren die zwei wichtigsten eingehenden Datenströme: die US-Bilder aus der ULA-OP-System und die 3D Positionsdaten von Motion-Tracker. Es bietet auch eine visuelle Rückmeldung an dem Betreiber für den übertragenden Bildern. Die Arbeitsstation hat wesentlich höhere Rechenkapazität und Speicherplatz. Freuen Sie sich auf Back-End-Unterstützung für Bild-Nachbearbeitung und ein Repository für die kombinierte Bildgebung Datasets. Die Arbeitsstation dient auchfür die Visualisierung von USA und Herr Bildern, einschließlich der Möglichkeit der gleichzeitigen 3D Visualisierung der registrierten Multi-modale Bilder.
Eine entscheidende Voraussetzung für die Bild-Erwerb-Experimente ist die Synchronisation der beiden wichtigsten Datenströme. Die Motion-tracking und ULA-OP-Systeme sind eigenständige Instrumente, die noch nicht wird eine explizite Synchronisierung der Aktivitäten unterstützt. Aus diesem Grund müssen US-Daten und Position Bildinformationen richtig kombiniert werden, um die richtige 3D Position der US-Sonde zum Zeitpunkt der erworbenen jedes Teilbild zu erkennen. Zu diesem Zweck wurde eine spezielle Logging-Anwendung für Aufnahme und Zeitstempel in Echtzeit entwickelt von der Motion-tracking-System, indem Sie ändern eine C++ Softwarekomponente, die enthalten ist, in diesem Fall in Motion-Tracker gelieferten Daten. Motion-Tracking-Systeme verfügen in der Regel eine Low-Level-API, ermöglicht, Daten in Echtzeit zu erfassen und übertragen sie in eine Datei.
Die angenommenen Synchronisierungsmethode funktioniert wie folgt. Jeder Eintrag in der Datei durch die Logging-Anwendung erzeugt wird ergänzt mit einem Zeitstempel im Format “Yyyy-MM-ddThh:mm:ss.kkk”, wo: y = Jahr, M = Monat, d = Tag, h = Stunde, m = Minuten, s = Sekunde, k = Millisekunden. Die ULA-OP PC-basierte Software (C++ und MATLAB Programmiersprachen) berechnet die Anfangs- und Endzeit jeder Erwerb Bildsequenz und speichert diese Informationen in jedem Bild im .vtk-Format. Um einen gemeinsamen zeitlichen Bezug während der Experimente zu ermöglichen, werden beide der oben genannten Software-Verfahren auf dem Front-End-Computer in Abbildung 3ausgeführt. Zeitstempel erzeugt auf diese Weise werden dann durch die Post-processing Software-Verfahren, die die endgültige Dataset zu produzieren verwendet (siehe Abschnitt 8-Protokoll).
Eine weitere spezifische Software-Komponente wurde realisiert und laufen auf der Arbeitsstation zu bieten Echtzeit-Feedback an den Betreiber von im Zusammenhang mit der aktuellen US probe Lage, MRT-Bilder und vor allem auf den Satz von vordefinierten Posen. Eine Server-seitige Softwareroutine in Python die Motion-Tracker-Log-Datei verarbeitet, die aktuelle US probe Position in eine geometrische Form, und sendet die Daten an einen Server von Paraview übersetzt. Ein Paraview-Client verbindet mit dem gleichen Paraview-Server und in Echtzeit zeigt die Position der geometrischen Form, überlagert auf einem MRT-Bild und weitere geometrische Formen beschreibt die vordefinierten Posen. Ein Beispiel für die sich daraus ergebenden Echtzeit-Visualisierung ist in Abbildung 17dargestellt.
