Ростом рынка для сканеров маленькие и портативные ультразвуковые (США) ведет к развитию новых уз ПЭП, в какой части кондиционирования сигналов и луча электроника интегрирована в зонд ручки, особенно для визуализации 3D / 4D 1. новые технологии, особенно подходят для достижения этого высокий уровень интеграции включают Micromachined ультразвуковых преобразователей (MUTs)2, класс преобразователей микро-электро-механические системы (MEMS), изготовленные на кремнии. В частности емкостной MUTs (CMUTs), наконец, достигли технологической зрелости, что делает их реальной альтернативой пьезоэлектрические преобразователи для следующего поколения УЗИ тепловизионных систем3. CMUTs являются весьма привлекательными из-за их совместимости с технологий микроэлектроники, широкополосные – который дает более высокое разрешение изображения – высокий тепловой КПД и, прежде всего, высокая чувствительность4. В контексте проекта ENIAC JU DeNeCoR (устройства для NeuroControl и нейрореабилитация)5, CMUT зонды в настоящее время развитые6 для США мозга изображений приложений (например нейрохирургия), где высокое качество 2D/3D/4 D изображения и требуется точное представление структур головного мозга.
В процессе разработки новых США зондов возможность выполнения ранних оценок изображений производительности имеет основополагающее значение. Типичный оценке методов включают измерения конкретные параметры, как разрешение и контрастность, основанная на изображениях ткани подражая фантомы с встроенный целями известные геометрии и эхогенности. Более реалистичный анализ с целями приложения визуализации может быть чрезвычайно ценными для ранней оценки ожидаемой производительности США зондов в возможности их применения в конкретных клинических поле. С другой стороны Полная повторяемость поглощения является основополагающим для сравнительного тестирования различных конфигураций с течением времени, и это требование правил в vivo эксперименты вообще.
Несколько работ в литературе на диагностические методы визуализации предложил использовать ex vivo животных образцы7, труп мозги8или ткани, подражая фантомы9 для10различных целей, которые включают в себя Проверка изображений методы, алгоритмы регистрации, магнитный резонанс (МР) последовательностей или пучка США и в результате качество изображения. Например в контексте визуализации мозга, Лазебник et al. 7 используется формалин Исправлена овец мозга для оценки нового метода регистрации 3D MR; Аналогичным образом, Чхо и др. 11 расследование процедуры для регистрации MR и световой микроскопии изображений фиксированным сова обезьяна мозга. Поливиниловый спирт (PVA) мозг Фантом был разработан в9 и используется для выполнения смешанных изображений приобретения (т.е. MR, США и компьютерная томография), для создания набора данных общего изображения12 для тестирования регистрации и алгоритмы обработки изображений.
В целом эти исследования подтверждают, что использование реалистичные цели для приобретения изображения действительно является важным шагом в процессе разработки новой техники визуализации. Это представляет собой еще более критический этап при проектировании нового изображения устройства, как зонд CMUT нас, представленные в этом документе, который находится в стадии прототипа и требует обширной и воспроизводимые тестирования со временем, для точной настройки всех дизайн параметры до ее окончательной реализации и возможной проверки в приложениях в естественных условиях (например,13,,14–15).
Экспериментальный протокол, описанные в этой работе была разработана таким образом предоставлять надежные, приложения визуализации процедуры оценки для разработанной США зондов, основанный на технологии CMUT. Для обеспечения реалистичности и повторяемость, говядину мозги (полученные через стандартный коммерческой цепочке снабжения продовольствием) исправлена в формалине были выбраны в качестве изображения цели. Процедура фиксацию гарантирует долгосрочное сохранение характеристик тканей при сохранении удовлетворительных морфологические качества и свойства видимости в США и г-н изображений16,17.
Протокол для оценки качества изображения США описанные здесь, также реализует функцию заимствованы из нейронавигация методов, используемых для нейрохирургии15. В таких подходах США зонды подключаются к трекинга система, обеспечивающая пространственного положения и ориентации данных в режиме реального времени. Таким образом можно автоматически зарегистрированы и визуализированы, для руководства, в суперпозиции для преоперативные изображения МРТ головного мозга пациента США изображения, полученные в ходе хирургической деятельности. Для целей протокола представленной совмещения с изображения МРТ (которые рассматриваются как золотой стандарт в томографии мозга) имеет большое значение, так как он позволяет человека экспертов визуально оценить который морфологических и функции ткани узнаваемы в США изображений и, наоборот, чтобы признать наличие изображений артефактов.
Возможность сравнивать изображения, полученные с различных датчиков США становится еще более интересным. Представил экспериментальный протокол включает в себя возможность определить набор пространственной ссылки позирует для приобретения США, сосредоточены на самый функциональный объем регионов, выявленных в предварительного визуального осмотра изображения МРТ. Интегрированный визуальный инструмент, разработанный для Paraview открытым исходным кодом программного обеспечения системы18, содержит указания для операторов для сопоставления таких предопределенных позы на этапах приобретения изображений США. Для процедуры калибровки, требуемые протоколом имеет основополагающее значение для оснащения всех целевых образцов – биологические или синтетические – с достопримечательностями предопределенные позиции, которые обеспечивают недвусмысленный пространственных ссылок. Такие достопримечательности должны быть видны в США и г-н изображения и физически доступны для измерений с движением, системы слежения. Элементы выбранной ориентир для эксперимента являются маленькие шары бесцветного стекла, видимость которых в США и г-н изображения была продемонстрирована в литературе19 и подтвердил предварительные США и г-н сканирования, которые проводятся перед представлены эксперименты.
Протокол представил опирается на УЗИ расширенный открыть платформы (Ула-OP)20, полной и открытой исследования и разработки системы для нас загрузки изображений, которая предлагает гораздо шире экспериментальных возможностей, чем коммерчески доступных Сканеры и служит общей основой для оценки различных датчиков США.
Во-первых описаны инструменты, используемые в этой работе, с уделением особого внимания недавно разработан CMUT зонда. Экспериментальный протокол является введениепредставил в деталях, с подробное описание всех процедур, от первоначального проектирования системы калибровки, для захвата изображений и пост-обработки. Наконец полученные изображения представлены и обсуждаются результаты, вместе с подсказки для будущего развития этой работы.
Приборостроение
CMUT зонд прототип
Были проведены эксперименты с использованием недавно разработанных 256-элемент CMUT линейный массив прототип, разработаны, изготовлены и упакованные в акустоэлектронные лаборатории (ACULAB) университета Roma Tre (Рим, Италия), используя CMUT обратный процесс изготовления ( ППП)4. ППП микротехнологий и упаковочные технологии, специально задумана для реализации MEMS преобразователи для нас визуализации приложений, whereby CMUT микроструктуры изготовлен на кремния ниже «вверх вниз» подход21. По сравнению с другими технологиями изготовления CMUT ППП дает производительность обработки изображений из-за высокой однородности CMUT клетки геометрии над весь массив, а также использование акустически инженерных материалов в пакете головы зонд. Важной особенностью ППП является, что электрические соединения колодки расположены в задней части CMUT умереть, который облегчает 3D-интеграция 2D массивы и внешний многоканальный электроники.
256-элемент массива CMUT был разработан для работы в частотном диапазоне центрирована на 7,5 МГц. Для массива, обусловило максимальную ширину поля зрения 51.2 мм был выбран элемент шаг 200 мкм. Высота отдельных элементов массива CMUT был определен для достижения подходящего производительности с точки зрения латеральное разрешение и возможности проникновения. 5 мм высота элемента массива был выбран для того чтобы получить ширину луча-3 дБ 0,1 мм и глубиной-3 дБ фокус 1,8 мм 7,5 МГц, когда исправление высоты фокус на глубине 18 мм с помощью акустических линз. 195 мкм широкий массив элементов были получены путем организации и электрически соединения в параллельных 344 круговой CMUT клеток, после гексагональной макета. Таким образом результирующая 5 мкм-элемент расстояние, т.е. пропиле, соответствует мембраны мембранного разделения. Схематическое изображение структуры массива CMUT сообщается в рисунке 1.
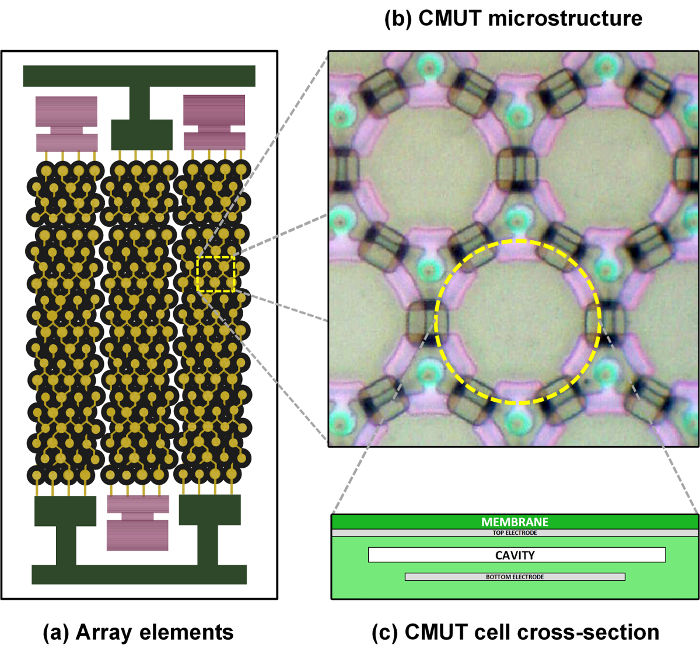
Рисунок 1: структура массива CMUT. Схематическое изображение структуры в CMUT массив: массив элементов, состоящий из нескольких клеток, связанных в параллельных (а), макет CMUT микроструктуры (b); сечение CMUT клетки (c). Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
CMUT микротехнологий параметров, т.е. боковые и вертикальные размеры пластины и электродов, были определены с помощью моделирования конечных элементов (FEM) моделирования с целью достижения операции широкополосного погружения, характеризуется Частотный отклик центрирована на 7,5 МГц и 100%-6 дБ двусторонний дробных пропускной способности. Высота полости, т.е. разрыв, был определен для достижения крах напряжения 260 V максимизировать двусторонний чувствительность, стабилизатор CMUT на 70% крах напряжения4, учитывая 80 V напряжение сигнала максимального возбуждения. В таблице 1 приведены основные геометрические параметры microfabricated CMUT.
| CMUT массив расчетные параметры | |
| Параметр | Значение |
| Массив | |
| Количество элементов | 256 |
| Элемент шаг | 200 мкм |
| Длина элемента (высота) | 5 мм |
| Фиксированная высота фокус | 15 мм |
| CMUT микроструктуры | |
| Диаметр ячейки | 50 мкм |
| Диаметр электрода | 34 мкм |
| Боковое расстояние к ячейке | 7,5 мкм |
| Толщина плиты | 2.5 мкм |
| Высота зазора | 0.25 мкм |
Таблицы 1. Параметры датчика CMUT. Геометрические параметры датчика линейного массива CMUT и CMUT клеток микроструктуры.
Процесс упаковки, используются для интеграции в CMUT массив в голову зонд описан в ссылка4. Акустических линз было изготовлено с помощью силиконового каучука комнатной температуры вулканизированной (РТВ), легированного металло оксидных нанопорошков матч акустическое сопротивление воды и избежать ложных отражений на интерфейс22. Полученный состав характеризовалась плотность 1280 кг/м3 и скорость звука 1100 м/сек. Радиус кривизны 7 мм был выбран для цилиндрических линз, приводит к геометрическим фокус 18 мм и максимальной толщиной приблизительно 0,5 мм над поверхностью датчика. Изображение головы зонд CMUT показано на рисунке 2().
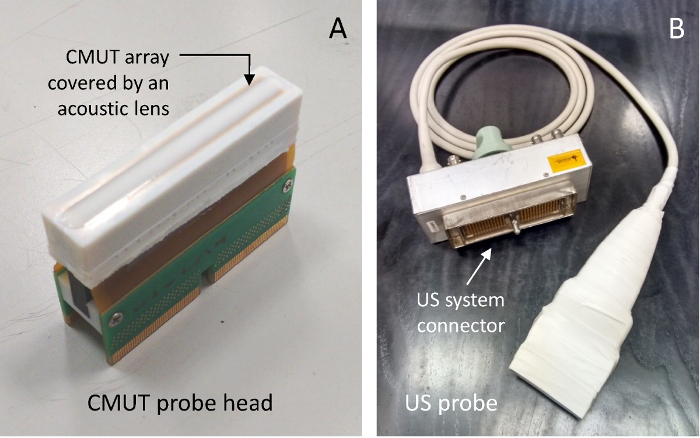
Рисунок 2: зонд CMUT. Глава развитых CMUT зонд, включая линейный массив преобразователей и акустические линзы () и полное CMUT зонд с разъема (b). Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
Голова CMUT зонд был соединен зонд дескриптор, содержащий многоканальный прием аналоговых интерфейсных электроники и многополярного кабель для подключения сканера США. Одноканальные электронные цепи является высокий входной импеданс усилитель напряжения 9 дБ, предоставляющий электрического текущего надо ездить кабель сопротивлением. Многоканальные электроники, описанные в разделе ссылки 4, основана на схемы топологии, включая малошумящий приемник сверхнизким энергопотреблением и интегрированный коммутатор для приема/передачи сигнала дуплексирование. Front-end электроники Источник питания и напряжения смещения CMUT создаются пользовательский блок питания и кормили зонд через многополярного кабель. Полный зонд показан на рисунке 2(b).
Пьезоэлектрические преобразователи США
Для качественного сравнения изображений, полученных с датчиком CMUTвыше два коммерчески доступных пьезоэлектрические датчики США были включены в экспериментах. Первый из них является линейный массив зонд с 192 преобразователя элементов, поле 245 мкм и 110% долей пропускания центрирована на 8 МГц. Этот зонд был использован для приобретения 2D изображения в B-режиме. Второй зонд является зонд для 3D визуализации с механически прокатилась линейный массив 180 преобразователя элементов, поле 245 мкм и 100% долей пропускания центрирована на 8,5 МГц. Шаговый двигатель помещен внутри зонда, жилье включает радикальные линейный массив приобрести несколько самолетов, которые могут быть использованы для реконструировать трехмерное изображение отсканированного объема23.
Ула ОП системы
Приобретение изображений США была проведена путем использования Ула-OP системе20, которая является полной и открытой США системы исследования и развития, разработаны и реализованы в лаборатории дизайна микроэлектроники систем Университета Флоренции, Италия. Ула-OP система может контролировать, как в передачи (TX) и прием (RX), до 64 независимых каналов соединен через матрицу переключатель США зонд с до 192 пьезоэлектрический или CMUT преобразователи. Системы архитектура функции две основные обработки доски, плата аналогового (AB) и цифровая плата (дБ), оба содержащиеся в стойку, которые комплектуются доску электропитание и задней плоскости доски, который содержит соединитель зонда и все внутренней маршрутизации компоненты. AB содержит front-end для зонда преобразователи, в частности электронные компоненты для аналоговых кондиционирования 64 каналов и программируемый переключатель матрицу, которая динамически сопоставляет каналы TX RX преобразователи. DB отвечает реального времени формирования луча, синтеза сигналов TX и RX обработки эхо для получения желаемого вывода (например, изображения в B-режиме или Doppler сонограмм). Стоит подчеркнуть что Ула-ОП системы полностью настраивается, поэтому сигнал в TX может быть любой сигналов произвольной формы в пределах пропускной способности системы (например три уровня импульсов, синус очередей, сигналы, Хаффман коды и т.д.) с максимальной амплитуда 180 Vpp; Кроме того, Стратегия формирования луча может быть запрограммирован согласно структуре Последнее фокусировки (например сосредоточены волна, multi-онлайн-передачи, плоской волны, расходящиеся волны, ограниченные дифракции балки и т.д.)24,25 . На аппаратном уровне эти задачи являются общими среди пяти местах программируемые вентильные матрицы (FPGA) и один цифровой сигнальный процессор (DSP). С механически прокатилась 3D визуализации зонды, таких, как описано выше Ула-ОП системы также управляет шаговым двигателем внутри датчика, для синхронизированных приобретения отдельных 2D кадров в каждой позиции массива преобразователей.
Ула-ОП системы можно повторно настроить во время выполнения и адаптированы к различными зондами США. Он общается через USB 2.0 канал с принимающей компьютер, оснащенный конкретного программного средства. Последний имеет настраиваемый графический интерфейс, который предоставляет в реальном времени визуализации изображений США, реконструирован в различных режимах; Например, с объемной зонды, два B-режим изображения перпендикулярных плоскостей в отсканированных тома могут отображаться в режиме реального времени.
Главным преимуществом Ула-ОП системы для целей протокола описаны является что она позволяет легко настройки параметров TX RX и он предоставляет полный доступ к сигнал данных, собранных на каждом этапе обработки цепи26, также делает его возможным для тестирования новых методов обработки изображений и луча методы27,28,29,30,,3132,33.
Система отслеживания движения
Для записи США зонд позиции во время захвата изображений, оптический движения, система отслеживания занятых34. Система основана на датчик, который излучает инфракрасный свет через два осветители (светоизлучающие диоды (СИД)) и использует два приемника (т.е. объектив и зарядовой (связью ПЗС)) для обнаружения света, отраженного от нескольких конкретных целей пассивный маркеры в предопределенных жесткой формы. Информация о отраженный свет затем обрабатывается бортового процессора для вычисления позиции и ориентации данных, которые могут быть переданы на компьютер подключен через USB 2.0. Же ссылка может использоваться для управления конфигурации блока датчика.
Датчик поставляется вместе с набором инструментов, каждый снабжен четырьмя Светоотражающий маркеры, расположены в жесткой геометрической конфигурации. Система отслеживания движения можно отслеживать до шести отдельных жестких средств одновременно, с рабочей частотой приблизительно 20 Гц. Два таких средства были использованы для этих экспериментов: инструмент «Указатель», которая позволяет приобретать 3D позиция тронут его кончик, и зажим есть инструмент, который может быть присоединен к зонду США под теста (см. Рисунок 14).
На стороне программного обеспечения трекер движения есть низкоуровневый последовательный интерфейс программирования (API) для оба подразделения контроля и сбора данных, которые могут быть доступны через USB. По умолчанию позиции и ориентации возвращаются как многократная элементов, то есть один вход на каждый инструмент отслеживается. Каждая запись содержит 3D позиции (x, y, z), выраженный в мм и ориентации (q0, qx, yq, qz) выражена как кватернион. Система также поставляется с панели инструментов высокого уровня программного обеспечения инструментов, который включает в себя графический отслеживания инструмент для визуализации и измерения в реальном времени позиции/направления нескольких инструментов в поле зрения блока датчика.
Программное обеспечение, обзор и интеграции компонентов системы
Диаграмма на рисунке 3 кратко инструментария, принят протокол, также описание потока данных, которая течет через систем.
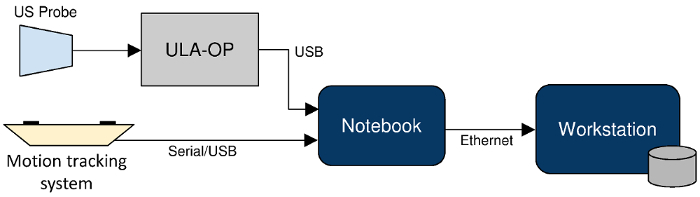
Рисунок 3: блок-схема установки и системы интеграции всего оборудования. Зонд США подключен к системе Ула-OP, которая общается через USB с помощью ноутбука для захвата изображений в США. В то же время ноутбук также подключен через USB для отслеживания системы для сбора данных позиции, движения и через Ethernet на рабочую станцию, для обработки данных. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
Помимо США датчики, отслеживания движения и Ула-ОП системы, которые были описаны выше, установки также включает в себя два компьютера, а именно ноутбуков и рабочих станций. Бывший является основной интерфейс для инструментирования, получения и синхронизации двух основных входящих потоков данных: США изображений, поступающих от системы Ула-OP и 3D-позиционирования данных из системы отслеживания движения. Она также обеспечивает визуальную обратную связь с оператором для изображений, приобретается. Рабочая станция имеет существенно более высокой вычислительной мощности и емкость. Он обеспечивает серверную поддержку для пост-обработки изображений и хранилище для комбинированных визуализации наборов данных. Рабочая станция также используетсядля визуализации США и г-н изображения включая возможность одновременной 3D визуализация зарегистрированных мультимодальной изображений.
Важнейшим требованием для экспериментов приобретения изображений является синхронизация двух потоков основных данных. Отслеживания движения и Ула-ОП системы являются независимыми инструментов, которые еще не поддерживают явной синхронизации деятельности. Благодаря этому США изображения данных и положение информацию необходимо надлежащим образом сочетать обнаружить правильный 3D положение зонда США в то время, приобретенные каждый фрагмент изображения. Для этой цели конкретные журнала приложения был разработан для записи и штампов времени в режиме реального времени данные, предоставленные отслеживания системы, изменяя программный компонент C++, включены, в данном случае, в сам трекер движения движения. Как правило системы отслеживания движения есть низкоуровневый API-интерфейс, который позволяет захвата данных в режиме реального времени и переписывание их в файл.
Метод синхронизации принимается работает следующим образом. Каждая запись в файл, созданный приложением журнала увеличивается с отметкой времени в формате «гггг мм ddThh:mm:ss.kkk», где: y = год, M = месяц, d = день, h = час, м = минуты, s = второй, k = миллисекунды. Ула-OP ПК на базе программного обеспечения (C++ и MATLAB языков программирования) вычисляет начальный и конечный момент каждого изображения последовательности приобретения и сохраняет эту информацию в каждом изображении в формате .vtk. Для обеспечения общей временной ссылку в ходе экспериментов, оба выше программного обеспечения процедуры выполняются на интерфейсном компьютере на рисунке 3. Штампы времени, произведенные таким образом используются постобработки процедуры программного обеспечения, которые производят окончательный набор данных (см. Протокол, статья 8).
Еще один конкретный программный компонент понял и запустить на рабочей станции для обеспечения реального времени обратной связи оператора, касающиеся текущий США зонд позицию изображения МРТ и, в частности, на набор предварительно определенных позах. Рутинные серверного программного обеспечения в Python обрабатывает файл журнала отслеживания движения, переводит текущий США зонд позицию в геометрические фигуры и отправляет данные на сервер Paraview. Paraview клиент подключается к тому же серверу Paraview и в режиме реального времени отображает положение геометрической формы, накладывается на изображении MR и далее геометрические фигуры, описывая предопределенные позы. Пример результате визуализации в реальном времени показан на рисунке 17.
