電子は特に 3 D, 4 D イメージング用プローブ ハンドルに統合信号調節とビームフォーミングのどの部分に新しい超音波プローブの開発に (米国) 小型でポータブル超音波スキャナーの増加する市場をリードします。1。 新興テクノロジがこの統合の高レベルを達成するために適している特にマイクロマシニングによる超音波探触子 (MUTs)2、シリコン上に作製したマイクロ電気機械システム (MEMS) 探触子のクラスが含まれます。特に、静電容量式 MUTs (CMUTs) 最後に、それらを次世代超音波イメージング システム3圧電トランスデューサーに有効な代替技術の成熟度に達しています。CMUTs、マイクロ エレクトロニクス技術、広帯域・高画像解像度の高い熱効率が得られます、上記のすべて、高感度4互換性の問題で非常に魅力的です。ENIAC じゅプロジェクト DeNeCoR (ニューロ制御とニューロリハビリテーション装置)5の中では、による CMUT プローブ開発6米国脳イメージング アプリケーション (例えば脳神経) が高品質をされている 2D/3 D ・ 4 D 画像と脳の構造の正確な表現が必要です。
新しい米国のプローブの開発プロセスでのイメージング性能の初期評価を行う可能性が基本です。典型的な評価技法で解像度と対照的に、知られている幾何学と錯乱の埋め込まれたターゲットを持つ組織模倣ファントム画像に基づくのような特定のパラメーターを測定します。アプリケーション固有のイメージ ターゲットとより現実的な分析は、米国プローブ臨床分野への潜在的な応用の期待される性能の初期評価のため非常に貴重なことができます。その一方で、買収の完全な再現性が時間をかけて、さまざまな構成の比較テストのための基本とこの要件ルール全体で生体内で実験。
画像診断技術に関する文献のいくつかの作品の提案前のヴィヴォ動物標本7死体脳8、または生体近似ファントム9異なる目的の10のための使用を含む、試験方法、登録アルゴリズム、磁気共鳴 (MR) シーケンス、または米国のビーム パターンを画像と画像の品質の結果します。たとえば、脳機能イメージング、Lazebnikらのコンテキストで7ホルマリン固定羊脳新しいの 3 D 氏登録方法を評価するのにために使用同様に、崔ら11氏の登録および固定フクロウ サル脳の顕微鏡画像の手順を検討しました。ポリビニル アルコール (PVA) 脳ファントムは9で開発され、マルチモーダル イメージ買収 (すなわち氏、米国、および計算された断層レントゲン写真撮影) 共有イメージ データセット12登録のテストを生成するを実行するために使用し、画像処理のアルゴリズム。
全体的にみて、これらの研究は、新しいイメージング技術の開発中に、画像関連の買収の現実的なターゲットの使用は確かに重要なステップを確認します。についてはまだ試作段階と広範かつ再現性のあるテストのすべての設計の正確な調整のための時間をかけて必要があります述べる米国による CMUT プローブなどの新しいイメージング デバイスを設計するとき、これはさらにもっと重要な段階を表しますその最後の実現と (13,14,15) のように生体内でアプリケーションで可能な限り検証する前にパラメーターです。
この作品で記述されている実験のプロトコルは、こうしてによる CMUT 技術に基づいて新たに開発された米国プローブの堅牢なアプリケーション固有のイメージング評価手順を提供する設計されています。リアリズムとをウシの再現性を確保するため頭脳 (標準的な食糧供給の商業チェーンを通して得られる)、ホルマリン固定はイメージングのターゲットとして選ばれました。固定方法は、満足のいく形態学的資質と米国の MRI16,17visibility プロパティを維持しながら組織の特性の長期的な保存を保証します。
米国画像品質評価のためのプロトコルは実装機能脳神経外科15使用するニューロナビゲーション技術から借りてもここで説明。このようなアプローチで米国プローブは、空間上の位置と方向のデータをリアルタイムに提供するシステムを追跡運動に接続されます。この方法で手術活動中に取得した米国イメージできます自動的に登録して、ガイダンスについては、患者の脳の pre-operatory の MR 画像への重ね合わせの可視化します。視覚的に評価をする人間の専門家を形態学的、組織の機能の認識以来の偉大な値の (これは脳イメージングのゴールド スタンダードとしてと見なされます) MR 画像と重ね合わせ提案するプロトコルのためはUS 像と副逆に、成果物のイメージングの存在を認識します。
探触子と米国で取得した画像を比較する可能性がさらに興味深いものになります。提示された実験的プロトコルには、MR 画像の予備的な検査で識別される最も機能豊富なボリューム領域に焦点を当てた米国買収の空間参照ポーズのセットを定義する可能性が含まれています。Paraview オープン ソース ソフトウェア システム18、ために開発された、統合されたビジュアル ツールは米国画像取得の段階でこのような定義済みのポーズを一致する演算子にガイダンスを示します。校正の手順はプロトコルで必要とされる、明確な空間参照を提供するあらかじめ定義された位置のランドマークとすべてのターゲット標本 – 生物学的または合成 – を装備する基本です。このようなランドマークが米国および MR 画像に表示されているモーショントラッ キング システムを使用した計測に物理的にアクセスできる必要があります。実験のため選択したランドマーク要素は、米国および MR 画像の視認性があった文献19に示すし、提示実験前に行う予備米国および氏スキャンによって確認、フリント ガラスの小さな球です。
画像の取り込みは、多く広い実験よりも商業的利用できる可能性を提供しています私たちの超音波高度なオープン プラットフォーム (ULA OP)20、完成して開く研究および開発システムに依存して示されるプロトコルスキャナーと異なる米国プローブの評価のための共通の基盤として機能します。
最初に、新設計による CMUT プローブへの特定の参照をこの作業で使用する楽器はとおりです。実験プロトコルはイントロシステム校正、画像取得、後処理の初期設計から、関連するすべての手順の完全な説明と、詳細に伴う残留。最後に、得られた画像やこの作品の今後の展開へのヒントと共に、結果説明。
計装
による CMUT プローブの試作
実験はプロトタイプを使用して、新たに開発した 256 要素による CMUT 線形配列、されローマ ・ トレ大学 (ローマ、イタリア) の仙台研究所 (ACULAB) で、設計、作製、による CMUT 作製プロセスの逆 (を使用して行ったRFP)4。RFP は、微細加工、包装技術、イメージング アプリケーション、次のシリコンでによる CMUT 微細構造を作製するという私たちの MEMS センサーの実現に向けた具体的構想「逆さま」アプローチ21。その他による CMUT 作製技術と比較して全体の配列を介してによる CMUT 細胞の形状の均一性のため画像処理パフォーマンスが向上し、プローブ ヘッド パッケージで音響的に設計された材料の使用に RFP が得られます。RFP の重要な機能は、2 D 配列とフロント エンドのマルチ チャネル電子の 3 D 統合が容易による CMUT 死ぬの後部に電気配線パッドがあることです。
256 要素による CMUT 配列は、7.5 MHz の中心周波数帯で動作するように設計されました。200 μ m の素子ピッチは、51.2 mm の最大ビュー フィールド幅に結果の配列に選ばれました。単一による CMUT 配列要素の高さは、水平解像度と透過能力の面で最適なパフォーマンスを達成するために定義されました。配列要素の高さが 5 mm は、音響レンズを用いた 18 mm の深さで標高フォーカスを修正する-3 dB ビーム幅 0.1 mm と 1.8 mm、7.5 MHz での焦点の-3 dB の深さを得るために選ばれました。195 μ m ワイド配列の要素は、配置と六角形のレイアウトに続く 344 並列による CMUT セル円形の電気接続で得られました。その結果、結果の 5 μ m の要素 – 距離すなわちカーフ、膜膜に一致します。による CMUT 配列構造の概略は、図 1で報告されます。
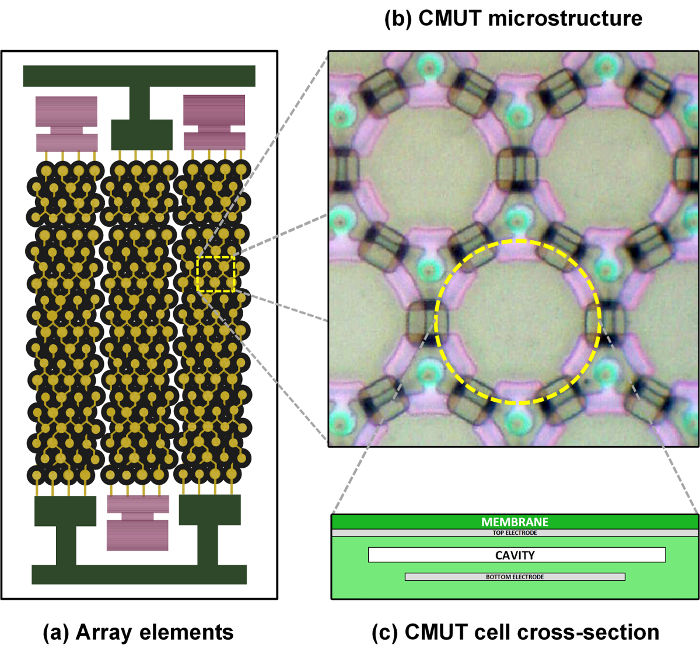
図 1: による CMUT 配列構造。による CMUT 配列構造の模式図: 配列の要素が接続された並列 (a)、レイアウトによる CMUT 微細構造 (b) の; いくつかの細胞から成る(c) による CMUT セルの断面。この図の拡大版を表示するのにはここをクリックしてください。
による CMUT 微細加工パラメーター、すなわち水平と垂直寸法の板と電極、シミュレーション有限要素モデリング (FEM) によって特徴付けられるブロード バンド浸漬操作を達成することを目的とした、7.5 MHz と 100%-6 dB 双方向比帯域幅を中心周波数応答。すなわち、ギャップ共振器の高さは、崩壊電圧 260 V、80 V 最大励起信号電圧を考慮した崩壊電圧4, 70% による CMUT を偏らせることで双方向の感度を最大にするを達成するために定義されました。微細加工による CMUT の主な幾何学的パラメーターを表 1 にまとめます。
| による CMUT 配列設計パラメーター | |
| パラメーター | 値 |
| 配列 | |
| 要素の数 | 256 |
| 素子ピッチ | 200 μ m |
| エレメント長 (標高) | 5 mm |
| 高度固定フォーカス | 15 mm |
| による CMUT 微細構造 | |
| セル径 | 50 μ m |
| 電極径 | 34 μ m |
| 細胞間の水平距離 | 7.5 μ m |
| 板厚 | 2.5 μ m |
| ギャップ間隔 | 0.25 μ m |
テーブル 1。による CMUT プローブ パラメーター 。による CMUT 線形アレイ プローブおよびによる CMUT 細胞微細構造の幾何学的パラメーターは。
プローブ ヘッドによる CMUT 配列を統合するために使用包装プロセスは参考資料4で説明します。水の音響インピー ダンスに一致し、インターフェイス22スプリアス反射を避けるために金属酸化物のナノをドープした室温加硫 (RTV) シリコーンゴムを用いた音響レンズを作製しました。結果として得られる化合物は 1280 kg/m3の密度と 1100 m/s の音の速度によって特徴付けられました。7 mm の曲率半径は、円筒レンズ、18 mm の幾何学的な焦点と探触子表面の上約 0.5 ミリメートルの最大厚さにつながるため選ばれました。による CMUT プローブ ・ ヘッドの写真を図 2(a)に示します。
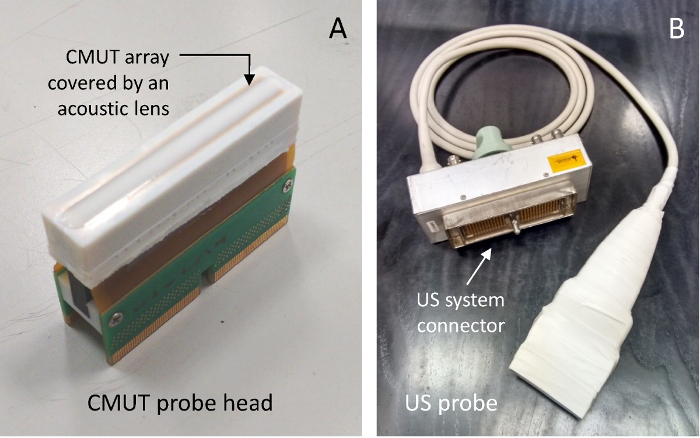
図 2: プローブによる CMUT 。開発による CMUT プローブ、探触子と音響レンズ (a)、線形配列を含むとコネクタ (b) 完全による CMUT プローブの頭。この図の拡大版を表示するのにはここをクリックしてください。
による CMUT プローブ ・ ヘッドにより、マルチ チャンネルのフロント アナログ フロント エンド回路と米国スキャナーへの接続用多極ケーブルを含むプローブ ハンドルに結合されていました。シングル チャネルの電子回路は、ケーブルのインピー ダンスを駆動に必要な電気流れを提供する高入力インピー ダンス 9 dB 利得電圧の増幅器です。参考資料4で説明されているマルチ チャンネルの電子は、超低消費電力低雑音受信機と送信/受信信号二重統合スイッチなどを含む回路トポロジに基づいています。による CMUT バイアス電圧とフロント エンド ・ エレクトロニクス電源、カスタム電源ユニットによって生成され、多極ケーブルを介してプローブを供給します。完全なプローブは、図 2(b)で示されます。
圧電米国プローブ
による CMUT プローブで得られた画像の質的な比較のため上記 2 つの圧電米国プローブ市販は、実験に含まれていた。最初の 1 つは、要素、245 μ m ピッチおよび 8 MHz を中心とした 110% 比帯域幅伝達 192 線形アレイ プローブです。このプローブは、2 D の B モード画像を取得する使用されました。2 つ目は、180 245 μ m ピッチと 100% の比帯域幅 8.5 MHz を中心とした要素を伝達の機械的に掃引の線形配列と 3 D イメージングのプローブ。ステッピング モーターは、プローブによりスキャンされた容積23の 3 D イメージを再構築に使用することができます複数の飛行機を取得する線形配列を席巻を住宅内に配置。
ULA OP システム
米国画像の取得は完全で開いた米国研究開発システムは、設計され、イタリアのフィレンツェ大学のマイクロ エレクトロニクス システム デザイン研究室で実現、ULA OP システム20を用いて実施されました。ULA OP システムは制御できますが、両方の送信 (TX) と受信 (RX)、最大 64 の独立したチャンネルに接続されているスイッチ マトリックスを通して米国プローブ最大 192 圧電またはによる CMUT 探触子。システム アーキテクチャ機能 2 つメイン処理ボード、アナログ ボード (AB)、デジタル ボード (DB)、ラックに含まれている両方電源ボードとプローブ コネクタおよびすべての内部ルーティングを含むバック プレーン ボードが完成コンポーネント。AB 型プローブ探触子のフロント エンドを特に含んでいる 64 チャンネル、トランスデューサー TX RX チャネルに動的にマップするプログラム可能なスイッチ マトリックスのアナログ調節のため電子部品。DB はリアルタイムのビームフォーミングを担当、TX 信号を合成し、RX の処理はエコー (例えば B モードの画像やドップラー超音波) の所望の出力を生成します。ULA OP システムは完全に設定可能、したがってテキサス州の信号最大システム帯域幅(例えば3 レベル パルス、サイン バースト、鳴き声、ハフマン符号等)内で任意の波形になることを強調する価値があります。180 Vpp の振幅最新フォーカシングのパターン (例えば焦点を当てて波、多ライン伝送、平面波、波、制限回折ビーム等の分岐) によるとビーム形成戦略をプログラムことができますまた、24,25.ハードウェア レベルでは、これらのタスクは 5 フィールド プログラマブル ゲート アレイ (Fpga) と 1 つのデジタル シグナル プロセッサ (DSP) の間で共有されます。機械的に掃引の 3 D イメージング プローブ、上記で説明したように ULA OP システムも送受波器アレイの各位置で個々 の 2 D フレームの同期獲得のため、プローブ内部のステッピングモータを制御します。
ULA OP システムは、実行時に再設定し、異なる米国プローブに適応できます。それは、特定のソフトウェア ツールを備えたホスト コンピューターと USB 2.0 チャネルを介して通信します。後者は様々 なモードで再構築、米国画像のリアルタイムの可視化を提供する構成可能なグラフィカルなインターフェイス容積測定プローブは、たとえば、スキャンしたボリュームに垂直な平面の 2 つの B モード画像表示できますリアルタイムで。
記述のプロトコルの目的の ULA OP システムの主な利点は、TX RX パラメーターの簡単チューニング可能処理チェーン26、また各ステップで収集された信号のデータへのフル アクセスを提供しています新しいイメージ投射様相とビームフォーミング技術27,28,29,30,31,32,33をテストします。
モーション追跡システム
画像の取得中にプローブの位置米国のレコードに、追跡システム光学式モーション採用34。システム 2 つのイルミネーター (発光ダイオード (Led)) 経由で赤外線発光センサー ユニットに基づいており、複数の目的に固有のパッシブに反射する光を検出する (すなわちレンズと電荷結合素子 (CCD)) 2 つの受信機を使用して剛、定義済み図形に配置されたマーカー。光の反射については USB 2.0 経由で接続されているホスト コンピューターに転送することができます位置と方向のデータを計算するオンボード CPU によって処理されます。同じリンクは、センサ ユニットの構成を制御する使用できます。
センサ ユニット船道具一式と一緒に、それぞれは 4 つの反射マーカをリジッド幾何学的構成で配置に恵まれています。モーショントラッ キング システムは、約 20 Hz の動作周波数で同時に最大六つの異なる剛体ツールを追跡できます。このような 2 つのツールは、これらの実験の使用された: の先端に触れて 3 D 位置を取得できるポインター ツールとクランプを搭載したツールの下で米国の調査に関連付けることができるテスト (図 14参照)。
ソフトウェア側では、モーション トラッカーは両方単位制御やデータ集録、USB 経由でアクセスできるため低レベルのシリアル アプリケーション プログラミング インターフェイス (API) を備えています。既定では、位置と方向項目として返されます複数エントリ、すなわち追跡されている各ツールごとに 1 つのエントリ。各エントリには、ミリメートルで表される 3 D 位置 (x、 y、 z) と四元数として表現される向き (q0 qx, qy qz) が含まれています。システムは、可視化とリアルタイム センサ ユニットの視野内の複数のツールの位置/方位測定のためのグラフィカルなトラッキング ツールを含む上位レベルのソフトウェア · インストゥルメントのツールボックスでまた来ます。
システムの概要、統合、およびソフトウェア コンポーネント
図 3のダイアグラムは、計測も、システム間で流れるデータ ストリームを示すプロトコルの採用をまとめたものです。
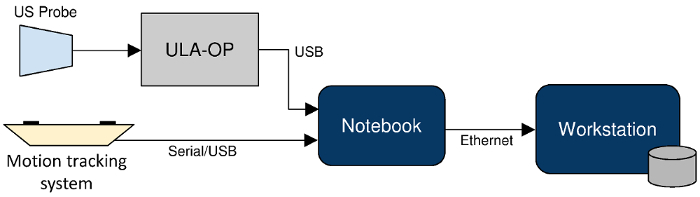
図 3: ブロック ダイアグラム全体のハードウェアのセットアップおよびシステム統合の。米国の調査は、米国のイメージの獲得のためのノートと USB 経由で通信する ULA OP システムに接続されています。同時にノートがまた追跡システム、位置データの集録、モーションに USB 経由で、データ処理のためのワークステーションにイーサネット経由で接続されています。この図の拡大版を表示するのにはここをクリックしてください。
離れて米国プローブ、モーション トラッカーと ULA OP システムは、上記で説明されている、セットアップは 2 台のコンピューター、すなわちノートブック、ワークステーションも含まれます。前者は、インストルメンテーション、受信および 2 つの主要な受信データ ストリームを同期するフロント エンドのメイン: ULA OP システムと 3 D モーション追跡システムからデータを位置決めから来る米国のイメージ。また、オペレーターに視覚的なフィードバックを買収される画像の提供します。ワークステーションが大幅に高い計算能力とストレージ容量です。画像の後処理と組み合わせた画像データセットを格納するリポジトリのバックエンド ・ サポートを提供しています。ワークステーションも使用されます。登録されているマルチ モーダル画像の 3次元可視化同時の可能性を含む米国および MR 画像の可視化。
画像取得実験のための重要な要件は、2 つのメイン データ ストリームの同期です。モーショントラッ キングと ULA OP システム活動の明示的な同期化をサポートしていない独立した楽器では。このため、米国イメージ データと位置情報は、イメージ スライスごとに買収された時に米国プローブの正しい 3 D 位置を検出する適切に混合する必要があります。この目的のためは、追跡システム、モーション トラッカー自体にこのケースでは、記載されている C++ ソフトウェア コンポーネントを変更することによって動きが提供するデータに特定のログ出力アプリケーションが録音とリアルタイムでタイムスタンプのため開発されました。通常、モーション トラッキング システムは、リアルタイムでデータをキャプチャし、ファイルにそれらの議事録作成を可能にする低レベルの API を備えています。
採用された同期メソッドは次のとおり機能します。ロギング アプリケーションによって生成されるファイル内の各エントリは、”yyyy MM ddThh:mm:ss.kkk”の形式でタイムスタンプを持つ拡張現実感: y = 年、M = 月、d = 日、h = 時間、m = 分、s = 秒 k = ミリ秒。ULA OP PC ベースのソフトウェア (C++ および MATLAB プログラミング言語) は開始および各イメージ ・ アクイジション ・ シーケンスの終了時刻を計算し、各画像を .vtk 形式でこの情報を格納します。実験中に一般的な時間参照を提供するには、両方上記ソフトウェアの手順は図 3のフロント エンド コンピューターで実行されます。この方法で生成されたタイムスタンプ、最終的なデータセットを生成する後処理ソフトウェア プロシージャで使用されます (プロトコル、セクション 8 を参照してください)。
別の特定のソフトウェア コンポーネントが実現し、現在の米国プローブ位置 MR 画像と、特に、定義済みのポーズのセットを関連付けることで、オペレーターにリアルタイムのフィードバックを提供するワークステーション上で実行します。Python でサーバー側のソフトウェア ルーチン モーション トラッカーのログ ファイルを処理、現在の米国プローブ位置に幾何学図形と送信 Paraview サーバーにデータを変換します。Paraview のクライアントは、同じ Paraview サーバーとリアルタイム表示で MR 画像と定義済みのポーズを説明するさらに幾何学的図形を重ね合わせて、幾何学的図形の位置を接続します。結果のリアルタイム可視化の例を図 17に示します。
