השוק גדל והולך של סורקי אולטראסאונד קטן ונייד (ארה ב) מובילה להתפתחות של הגששים echographic חדש באיזה איזור של האות-מיזוג ו- beamforming אלקטרוניקה משולב בידית המכשיר, במיוחד עבור הדמיה תלת-ממד/4 יח 1. מתאים במיוחד כדי להשיג רמה גבוהה זו של שילוב טכנולוגיות Emerging כוללים Micromachined אולטראסוניות מתמרים (MUTs)2, מחלקה של מערכת אלקטרו-מכני מיקרו (MEMS) מתמרים מפוברק על הסיליקון. בפרט, MUTs קיבולי (CMUTs) סוף סוף הגיעו בשלות טכנולוגית שגורם להם אלטרנטיבה חוקית מתמרים פיזואלקטריים הבא הדור אולטראסאונד הדמיה מערכות3. CMUTs פונים מאוד עקב שלהם תאימות עם טכנולוגיות מיקרואלקטרוניקה, רוחב פס רחב – אשר מניב ברזולוציה גבוהה יותר – יעילות תרמית גבוהה ומעל הכל, רגישות גבוהה4. בהקשר של הפרויקט אניאק JU DeNeCoR (התקנים עבור NeuroControl ו- NeuroRehabilitation)5, CMUT הגששים מתבצעת מפותחת6 עבור ארה ב המוח הדמיה יישומים (לדוגמה: נוירוכירורגיה), שבו באיכות גבוהה תמונות דו-ממדי/תלת-ממד/4 D ו ייצוג מדויק של מבנה המוח נדרשים.
תהליך הפיתוח של הגששים ארה ב החדש, האפשרות של ביצוע הערכות מוקדמת של הדמיה ביצועים הוא מהותי. טכניקות הערכה טיפוסי לערב מדידת פרמטרים ספציפיים כגון רזולוציה וניגודיות, המבוסס על תמונות של מטוסי פאנטום מחקה רקמות עם מטרות מוטבע של הגיאומטריה הידוע, echogenicity. ניתוח יותר מציאותי עם מטרות דימות ייחודית ליישום יכול להיות יקר מאוד עבור הערכה מוקדמת של הביצועים הצפוי של ארה ב הגששים ביישום הפוטנציאליים שלהם לשדה הקליני ספציפי. מצד שני, הדיר מלאה של רכישות הוא יסוד בדיקה השוואתית של תצורות שונות לאורך זמן, דרישה זו ששולל ניסויים ויוו לגמרי.
מספר יצירות הספרות על טכניקות הדמיה אבחון הציע את השימוש שמחוץ דגימות בעלי חיים7, נגועה בסרטן המוח8או רקמות מחקה פאנטום9 עבור מטרות שונות10, אשר כוללים בדיקה של שיטות הדמיה, רישום אלגוריתמים, רצפים תהודה מגנטית (MR) או את ארה ב הקרן-הדפוס, וכתוצאה מכך איכות התמונה. כך למשל, בהקשר של הדמיה מוחית, לזבניק. et al. 7 להשתמש מוח כבשים פורמלין-קבוע כדי להעריך 3D מר רישום שיטה חדשה; באופן דומה, והילדים. et al. 11 חקר הליך הרישום של מר, מיקרוסקופ אור תמונות של מוח הקוף ינשוף קבוע. מוח אלכוהול (PVA) פנטום היה פותח ב9 , המשמש לביצוע רכישות תמונה עם מודאלים מרובים (כלומר מר, ארה ב, ו טומוגרפיה שחושב) כדי ליצור את הנתונים (dataset) תמונה משותפת12 לבדיקה של רישום, הדמיה אלגוריתמים.
באופן כללי, מחקרים אלה לאשר כי השימוש של יעד מציאותי עבור רכישות התמונה הוא אכן צעד חיוני במהלך פיתוח טכניקה הדמיה חדשה. זה מייצג שלב קריטי עוד יותר בעת עיצוב התקן הדמיה חדש, כמו CMUT אותנו המכשיר הציג במאמר זה, אשר עדיין בשלב שטנץ, זקוק לשחזור וחובק בדיקות לאורך זמן, עבור כוונון מדויק של כל עיצוב פרמטרים לפני מימוש הסופי שלה ובדיקת אפשרי ויוו יישומים (כמו13,14,15).
פרוטוקול הניסוי המתואר בעבודה זו תוכנן ובכך לספק חזקות, ליישום הדמיה הערכת הליך עבור ארה ב פיתח הגששים מבוסס על טכנולוגיית CMUT. כדי להבטיח ריאליזם והן הדיר, שור המוח (להשיג דרך שרשרת אספקת מזון מסחרי רגיל) קבוע בפורמלין נבחרו כמו הדמיה מטרות. ההליך קיבוע ערבויות שימור לטווח ארוך של מאפייני הרקמה תוך שמירה משביע רצון מורפולוגי וסגולותיהם ניראות, הן בארה ב והן מר הדמיה16,17.
הפרוטוקול עבור הערכת איכות התמונה ארה ב המתוארים כאן גם מיישמת תכונה שהושאל neuronavigation טכניקות המשמשות עבור נוירוכירורגיה15. בגישות כאלה, ארה ב הגששים מחוברים על ההצעה מעקב מערכת המספקת המיקום המרחבי ואת הכיוון נתונים בזמן אמת. בדרך זו, תמונות ארה ב רכשה במהלך פעילות כירורגית יכול להיות באופן אוטומטי רשום, דמיינו, להדרכה, סופרפוזיציה לתמונות מר pre-operatory של המוח של המטופל. לצורך הפרוטוקול שהוצגו, הסופרפוזיציה עם תמונות מר (אשר נחשבים תקן הזהב של הדמיה מוחית) הוא בעל ערך רב, היות זה מאפשר מומחים האדם להעריך באופן חזותי אשר מורפולוגי רקמות תכונות מוכר ארה ב ותמונות, סגן להיפך, כדי לזהות הנוכחות של הדמיה חפצים.
אפשרות להשוות תמונות רכשה עם הגששים בארה ב שונה הופך להיות מעניין יותר. פרוטוקול ניסיוני המוצג כולל את האפשרות להגדיר קבוצת התייחסות המרחבי מהווה עבור רכישות בארה ב, התמקדו האזורים נפח הכי עשיר בתכונות שזוהתה בדיקה חזותית ראשוני של מר תמונות. כלי חזותי משולב, שפותחה עבור Paraview קוד פתוח תוכנה מערכת18, מספק הדרכה למפעילי עבור התאמה כזו מהווה מראש במהלך שלבי רכישת התמונה בארה ב. ההליכים כיול הנדרש על-ידי הפרוטוקול, זה היסוד, כדי לצייד את כל דגימות היעד – ביולוגי או סינתטי – עם ציוני דרך מיקום מוגדר מראש מספקות הפניות מרחבית ברורה וחד משמעית. ציוני דרך כזה חייב להיות גלוי בתמונות הן בארה ב והן מר ונגיש פיזית למדידות שנעשו עם ההצעה מעקב המערכת. הרכיבים ציון שבחרת עבור הניסוי הם כדורים קטנים מזכוכית חלמיש, אשר נראות בתמונות הן בארה ב והן מר הפגינו את הספרות19 ומאושר על-ידי ראשוני סריקות US ו מר מתבצעות לפני הניסויים שהוצגו.
פרוטוקול שהוצג מסתמך על סאונד מתקדמות לפתוח פלטפורמה (אולה-OP)20, מלא ופתוח למחקר, פיתוח מערכת עבורנו ייבוא תמונות, אשר מציע הרבה ניסיוני רחב יותר אפשרויות מאשר מסחרית זמינים סורקים, משמשת בסיס על ההערכה של הגששים בארה ב שונה.
ראשית, כלי הנגינה המשמשים עבודה זו מתוארים, עם התייחסות מיוחדת החללית CMUT שעוצבו לאחרונה. פרוטוקול נסיוני הוא הקדמהduced בפירוט, עם תיאור מעמיק של כל ההליכים מעורב, משלב התכנון הראשוני כיול המערכת, כדי שלאחר עיבוד של התמונה רכישת. לבסוף שהושג התמונות מוצגות, התוצאות הנזכרים, יחד עם רמזים להתפתחויות עתידיות של עבודה זו.
מכשור
CMUT בדיקה אב טיפוס
הניסויים בוצעו באמצעות פיתח 256-אלמנט CMUT מערך ליניארי אבטיפוס, תוכנן מפוברק, ארוז ב Acoustoelectronics מעבדה (ACULAB) של אוניברסיטת רומא טרה (רומא, איטליה), שימוש (תהליך ייצור הפוך CMUT RFP)4. RFP מיקרו-מלאכותית, אריזת טכנולוגיה, במיוחד הגה למימוש MEMS מתמרים עבורנו הדמיה יישומים, לפיה מיקרו CMUT מפוברק על הסיליקון הבא “הפוך” הגישה21. לעומת טכנולוגיות ייצור אחרות CMUT, RFP מניב ביצועים משופרים הדמיה בשל אחידות גבוהה של הגיאומטריה התאים CMUT מעל המערך כולו, והשימוש בחומרים המתקפלות מהונדסים בחבילה בראש המכשיר. תכונה חשובה של RFP היא כי הידיות interconnection חשמל ממוקמים על החלק האחורי של ה מת CMUT, אשר מקלה על 3D-השילוב של מערכים דו-מימדית ואלקטרוניקה רב ערוצית החזיתי.
המערך CMUT 256-אלמנט תוכנן לפעול בלהקה בתדירות ממורכז בתדר 7.5 מגה-הרץ. גובה הצליל אלמנט של מיקרומטר 200 נבחרה עבור המערך וכתוצאה מכך רוחב שדה-of-view המרבי של 51.2 מ מ. הגובה של רכיבי המערך CMUT יחיד הוגדרה כדי להשיג ביצועים מתאימים מבחינת רזולוציה לרוחב ויכולת החדירה. גובה אלמנט מערך של 5 מ מ נבחר על מנת לקבל רוחב קרן-3 dB של 0.1 מ מ ועומק-3 dB של המוקד של 1.8 מ- 7.5 מגה-הרץ, כאשר תיקון המוקד העלאת בעומק של 18 מ מ בעזרת עדשת אקוסטית. לרכיבי המערך מיקרומטר ברוחב 195 התקבלו על-ידי סידור וחיבור חשמלית בתאים מקבילים 344 מעגלית CMUT, בעקבות פריסת משושה. כתוצאה מכך, וכתוצאה מכך 5 מיקרומטר רכיב אל-רכיב המרחק, כלומר kerf, תואם את הפרדת ממברנה-כדי-הממברנה. ייצוג סכמטי של המבנה של מערך CMUT הוא דיווח באיור1.
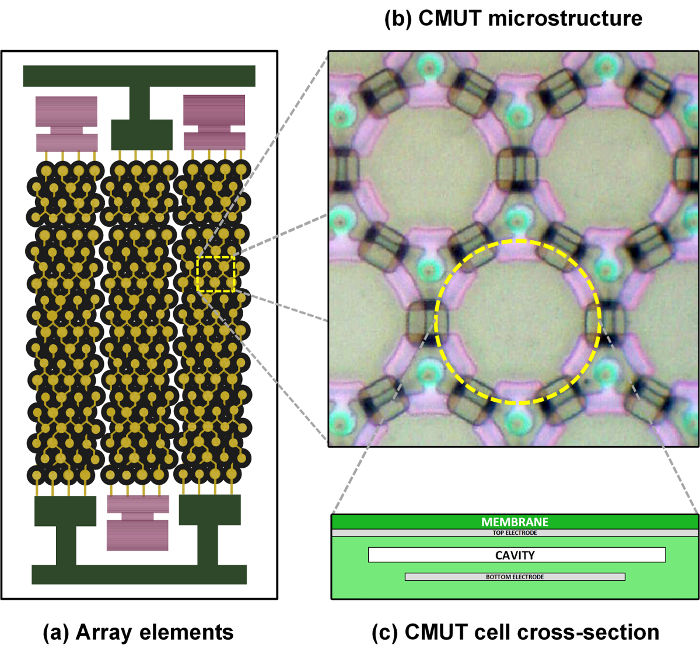
איור 1: מבנה מערך CMUT. ייצוג סכמטי של המבנה של מערך CMUT: מערך אלמנטים מורכב של תאים אחדים קשורים מקבילים (א), הפריסה של CMUT מיקרו (ב); חתך רוחב של תא CMUT (ג). אנא לחץ כאן כדי להציג גירסה גדולה יותר של הדמות הזאת.
CMUT מיקרו-מלאכותית פרמטרים, כלומר לרוחב וממדים אנכי של צלחת, אלקטרודות, הוגדרו באמצעות סימולציות מידול אלמנט סופי (FEM) עם המטרה של השגת מבצע טבילה בפס רחב, המאופיינת על ידי תגובת תדר ממורכז 7.5 מגה-הרץ, עם 100%-6 dB דו-כיווני החלקי רוחב פס. הגובה של החלל, כלומר הפער, הוגדרה להשגת מתח התמוטטות של 260 V כדי למקסם את הרגישות דו-כיווני, מאת ממתח CMUT ב-70% של מתח ‘ קריסת ‘4, בהתחשב מתח האות עירור המרבי 80 של V. טבלה 1 מסכמת את הפרמטרים גיאומטרי הראשי של microfabricated CMUT.
| פרמטרי תכנון מערך CMUT | |
| פרמטר | ערך |
| מערך | |
| מספר אלמנטים | 256 |
| רכיב המגרש | מיקרומטר 200 |
| אלמנט האורך (גובה) | 5 מ מ |
| המיקוד קבועה | 15 מ מ |
| מיקרו CMUT | |
| קוטר תא | 50 מיקרומטר |
| קוטר אלקטרודה | מיקרומטר 34 |
| מרחק לרוחב-לתא | 7.5 מיקרומטר |
| צלחת עובי | 2.5 מיקרומטר |
| גובה הפער | 0.25 מיקרומטר |
טבלה 1. פרמטרים בדיקה CMUT. פרמטרים גיאומטריים של בדיקה לינארית-מערך CMUT, CMUT תא מיקרו.
בתהליך האריזה בשימוש להשתלב במערך CMUT בראש המכשיר מתואר הפניה4. העדשה אקוסטית היה מפוברק באמצעות גומי סיליקון טמפרטורת החדר גופרית (RTV) מסטול עם ננו אבקות מתכת-תחמוצת כדי להתאים את עכבה אקוסטית של מים ולהימנע השתקפויות כדין ממשק22. המתחם שנוצר התאפיינה צפיפות של 1280 ק ג/מ’3 ומהירות של הצליל של 1100 מטר לשנייה. רדיוס עקמומיות של 7 מ מ נבחרה עבור העדשה גלילי, המוביל אל מוקד גיאומטרי של 18 מ מ, עובי מרבי של-0.5 מ מ מעל פני השטח מתמר. תמונה של הראש בדיקה CMUT מוצג איור 2(א).
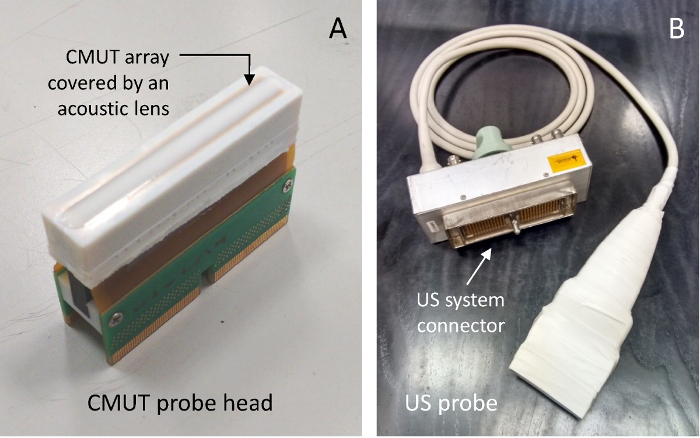
איור 2: בדיקה CMUT. ראש המכשיר CMUT מפותחת, כולל המערך ליניארי של מתמרים, עדשה אקוסטית (א), והבדיקה CMUT מלא עם מחבר (b). אנא לחץ כאן כדי להציג גירסה גדולה יותר של הדמות הזאת.
בראש המכשיר CMUT היה בשילוב של הידית בדיקה המכילות אלקטרוניקה החזיתי אנלוגי רב-ערוצי הקבלה ואת כבל multipolar בקשר עם הסורק בארה ב. המעגל אלקטרונית ערוץ אחד הוא גבוה קלט-עכבה dB 9-רווח מתח מגבר המספק חשמל הנוכחי הצורך לנהוג על עכבה כבל. האלקטרוניקה רב-ערוצי, תיאר הפניה 4, מבוסס על טופולוגיה מעגל של מקלט רעש נמוכה במיוחד-נמוך-כוח כולל מתג משולב עבור בהכפלה אות שידור/קליטה. אלקטרוניקה החזיתי הזרם והמתח הסטייה את CMUT שנוצר על ידי יחידת אספקת כוח מותאם אישית, להאכיל את המכשיר דרך הכבל multipolar. החללית מלאה מוצג איור 2(b).
פיזואלקטריים הגששים בארה ב
לשם השוואה איכותית של התמונות שהושג עם החללית CMUTלעיל, נכללו שני רגשים ארה ב זמין מסחרית פיזואלקטריים בניסויים. הראשון הוא בדיקה לינארית-array עם 192 transducing אלמנטים, זריקה מיקרומטר 245, ורוחב פס החלקי של 110% מרוכזת בשעה 8 מגה-הרץ. המכשיר הזה שימש כדי לרכוש תמונות B-מצב 2D. המכשיר השני הוא בדיקה עבור הדמיה תלת-ממדית עם מערך ליניארי swept מכנית של 180 transducing רכיבים, עם זריקה מיקרומטר 245 ורוחב פס החלקי של 100% ממורכז בתדר 8.5 מגה-הרץ. מנוע stepper ממוקמים בתוך החללית הדיור מאפשר גורף את המערך ליניארי לרכוש מספר מישורים, אשר יכול לשמש כדי לשחזר תמונה תלת-ממדית של אמצעי האחסון שנסרק23.
אולה-OP מערכת
רכישת תמונות ארה ב בוצע על ידי העסקת את אולה-OP מערכת20, אשר היא מלאה ופתוח בארה ב מחקר ופיתוח מערכת, תוכנן והבנתי במעבדה מיקרואלקטרוניקה מערכות עיצוב של מאוניברסיטת פירנצה, איטליה. אולה-OP המערכת שולטת, שניהם שידור (טי אקס) ומחובר הקבלה (RX), עד 64 ערוצים עצמאיים באמצעות מתג מטריצה בדיקה בארה ב עד 192 פיזואלקטריים או CMUT מתמרים. מערכת ארכיטקטורה תכונות שני עיבוד ראשי הלוחות, של לוח אנלוגי (אלב) ושניהם דיגיטלי לוח (DB), הכיל בארון תקשורת, אשר הושלם על ידי לוח החשמל לוח גב-המטוס המכיל המחבר את המכשיר ואת כל פנימי ניתוב רכיבים. AB מכיל חזיתי החללית מתמרים, בפרט של רכיבים אלקטרוניים עבור מיזוג אנלוגי הערוצים 64 ואת המטריצה מתג לתכנות הממפה באופן דינמי את הערוצים TX-RX אל מתמרים. DB אחראי על beamforming בזמן אמת, סינתזה של אותות שידור ועיבוד של RX מהדהד להפקת הפלט הרצוי (למשל תמונות B-מצב או הבדיקות דופלר). ראוי להדגיש כי מערכת אולה-OP להגדרה במלואה, ומכאן ניתן האות ב- TX waveform שרירותי כלשהו בתוך הפס המערכת (למשל שלוש רמות פולסים, סינוס-התפרצויות, ציוץ ציפורים, קודי האפמן, וכו ‘) עם מקסימום משרעת של 180 Vpp; בנוסף, ניתן לתכנת את האסטרטגיה beamforming על פי הדפוסים התמקדות האחרון (למשל ממוקד גל, מולטי-שורת-שידור, גל מישורי, מתפצל גלים, קורות עקיפה מוגבל, וכו ‘)24,25 . ברמת החומרה, משימות אלה משותפים בין חמש שדה לתכנות שער מערכים (FPGAs), מעבד אותות דיגיטלי (DSP) אחד. עם נסחף מכנית 3D הדמיה הגששים, כגון זה המתואר לעיל, מערכת אולה-OP שולט גם המנוע stepper שבתוך המכשיר, לצורך רכישת מסגרות 2D בודדות במיקום כל המערך מתמר מסונכרן.
אולה-OP המערכת יכול להיות מוגדר מחדש בזמן ריצה ומותאמים הגששים בארה ב שונה. זה מתקשר דרך ערוץ USB 2.0 עם מחשב מארח, מאובזר עם כלי תוכנה ספציפית. האחרון יש ממשק גרפי להגדרה מספק בזמן אמת להדמיה של ארה ב תמונות, שיחזר מצבים שונים; עם נפחי הגששים, למשל, שתי תמונות B-מצב של מטוסים בניצב באמצעי האחסון שנסרק ניתן להציג בזמן אמת.
היתרון העיקרי של מערכת אולה-OP למטרות של הפרוטוקול המתואר הוא כי היא מאפשרת כוונון קל של הפרמטרים TX-RX והוא מציע גישה מלאה אות הנתונים שנאספו בכל שלב עיבוד שרשרת26, גם עושה את זה אפשרי כדי לבדוק שיטות הדמיה חדשה ואת beamforming טכניקות27,28,29,30,31,32,33.
מערכת מעקב תנועה
רשומה בארה ב בדיקה עמדה במהלך ייבוא תמונות, תנועה אופטי מערכת מעקב מועסקים34. המערכת מבוססת על יחידת חיישן הפולטת אור אינפרא אדום באמצעות שני illuminators (אור (נוריות) דיודות פולטות) ומשתמש שני מקלטי (קרי עדשה, עם תשלום מצמידים מכשיר (CCD)) כדי לזהות את האור בא לידי ביטוי מספר פסיבי מטרה ספציפית סמנים מסודרים בצורות נוקשה מוגדרים מראש. מידע על אור המשתקף ואז יעובד על-ידי ה-CPU ב- board כדי לחשב נתונים מיקום וכיוון, אשר ניתן להעביר מחשב מארח מחובר דרך USB 2.0. באותו הקישור יכול לשמש כדי לקבוע את התצורה של היחידה חיישן.
יחידת חיישן ספינות יחד עם סט של כלים, כל אחד ניחן ארבעה סמנים רפלקטיביים מסודרים בתצורה גיאומטרית נוקשה. ההצעה מעקב המערכת באפשרותך לעקוב אחר עד שישה כלים נוקשה שונות בו זמנית, בתדר עבודה של-20 Hz. שני כלים אלה שימשו ניסויים אלה: כלי המצביע, המאפשר רכישת התנוחה התלת-ממד נגע את קצהו, וכן כלי מצויד קלאמפ, כי ניתן לחבר את המכשיר בארה ב תחת מבחן (ראה איור 14).
בצד התוכנה, כולל המעקב תנועה ברמה נמוכה סדרתי ממשק תכנות יישומים (API) עבור שתי יחידות נתונים ובקרה הרכישה, שניתן לגשת אליהם באמצעות כבל USB. כברירת מחדל, מיקום וכיוונים מוחזרים כניסה מרובת פריטים, כלומר ערך אחד בכל כל כלי במעקב. כל ערך מכיל עמדה תלת-ממד (x, y, z) מבוטא במ מ אוריינטציה (q0, qx, qy, q-z) המבוטא של קווטרניונים. המערכת גם מגיע עם ארגז של כלי תוכנה ברמה גבוהה יותר, אשר כוללת כלי מעקב גרפי להמחיש ומדידת בזמן אמת את העמדות/כיוונים של כלים מרובים בתוך שדה הראייה של היחידה חיישן.
רכיבי המערכת סקירה, אינטגרציה ותוכנות
הדיאגרמה באיור 3 מסכם את המכשור אימצה עבור הפרוטוקול, גם המתאר זרם הנתונים זורם על פני המערכות.
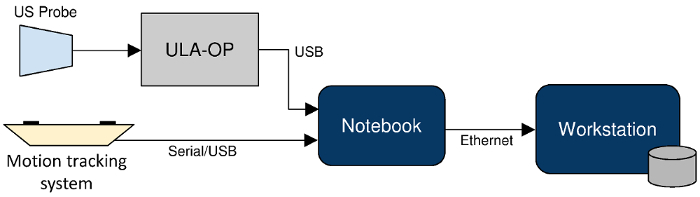
איור 3: דיאגרמת בלוק של השילוב ההתקנה ומערכת החומרה כל. החללית ארה ב מחובר למערכת אולה-OP אשר מתקשר באמצעות כבל USB עם המחברת עבור רכישת התמונה בארה ב. במקביל, המחברת מקושרת גם דרך ה-USB ההצעה מעקב המערכת, עבור רכישת נתוני מיקום, ו באמצעות Ethernet לתחנת העבודה, לעיבוד נתונים. אנא לחץ כאן כדי להציג גירסה גדולה יותר של הדמות הזאת.
מלבד את הגששים בארה ב, הגשש תנועה, המערכת אולה-OP, אשר תוארו לעיל, ההגדרה כוללת גם שני מחשבים, כלומר מחשב נייד ותחנת עבודה. הראשון הוא הראשי חזיתי אינסטרומנטציה, קבלת וסינכרון של זרמי נתונים של נכנסות הראשי שני: הדימויים בארה ב מגיע למערכת אולה-OP ו 3D מיצוב נתונים ברכיב המעקב תנועה. הוא גם מספק משוב חזותי למפעיל לתמונות להיות רכשה. תחנת העבודה יש קיבולת כוח ואחסון חישובית גבוהה יותר באופן משמעותי. זה מספק תמיכה העורפי שלאחר עיבוד התמונה ואת מאגר datasets הדמיה משולב. תחנת העבודה משמש גםעבור הפריט החזותי של ארה ב ושל מר תמונות, כולל אפשרות סימולטני לוויזואליזציה תלת-ממדית של תמונות ומשולבות רשומים.
דרישה קריטי עבור הניסויים רכישת התמונה הוא הסינכרון של שני הנחלים הנתונים הראשי. ההצעה מעקב ומערכות אולה-OP הם עצמאיים מכשירים שלא תומכים עדיין של סינכרון מפורשת של פעילויות. בגלל זה, נתוני מיקום ונתונים תמונה בארה ב צריך להיות משולב כראוי כדי לזהות את המיקום הנכון 3D של המכשיר בארה בזמן כל פרוסה תמונה נרכשה. למטרה זו, יישום רישום ספציפי פותחה עבור הקלטה של הוספת חותמת זמן בזמן אמת את הנתונים שסופקו על ידי ההצעה מעקב המערכת, על-ידי שינוי רכיב תוכנה C++ זה נכלל, במקרה זה, ברכיב המעקב התנועה עצמה. בדרך כלל, מערכות עקיבת תנועה כוללים API ברמה נמוכה המאפשר לכידת נתונים בזמן אמת ותמלול אותם לקובץ.
שיטת סינכרון המאומץ עובד כדלקמן. כל רשומה בקובץ המופק על-ידי היישום רישום מהסוללות מומר עם חותמת זמן בתבנית “yyyy-MM-ddThh:mm:ss.kkk”, שבו: y = שנה, M = חודש, d = יום, h = שעה, m = דקה, s = k השניה, = אלפית שנייה. התוכנה מבוסס מחשב אולה-OP (C++ ו MATLAB שפות תכנות) מחשבת את ההתחלה והסיום זמן של כל רצף רכישת תמונות ומאחסן מידע זה בכל תמונה בתבנית .vtk. לספק הפניה טמפורלית נפוצות במהלך הניסויים, מתבצעות בשני הליכים תוכנה לעיל במחשב חזיתי באיור3. חותמות זמן המופק בדרך זו משמשים לאחר מכן על ידי ההליכים תוכנת עיבוד דפוס, המייצרים את ערכת הנתונים הסופי (ראה פרוטוקול, סעיף 8).
רכיב תוכנה ספציפית אחר הבנתי ולהפעיל בתחנת העבודה לספק משוב בזמן-אמת למפעיל, על-ידי הנוגעות הנוכחי בארה ב בדיקה מיקום לתמונות מר ו, בפרט, כדי להגדיר את תנוחות מוגדרים מראש. רוטינה בצד השרת תוכנת פייתון מעבד את קובץ יומן הרישום של הגשש תנועה, מתרגמת הנוכחי בארה ב בדיקה עמדה לתוך צורה גיאומטרית, ושולח הנתונים לשרת Paraview. לקוח Paraview מתחבר באותו שרת Paraview ועל מציג בזמן אמת את המיקום של הצורה, נקודות המגע המוצגים על תמונת מר וכדי צורות גיאומטריות נוסף המתאר את תנוחות מוגדרים מראש. דוגמה של הפריט החזותי בזמן אמת וכתוצאה מכך מוצג באיור17.
