O mercado crescente para scanners de pequeno e portátil ultra-som (US) está levando ao desenvolvimento de novas sondas ecográficos em que parte do condicionamento de sinal e beamforming eletrônica está integrada no punho da sonda, especialmente para geração de imagens 3D/4D 1. tecnologias emergentes, particularmente adequadas para atingir este elevado nível de integração incluem microusinado Transdutores Ultrassônicos (MUTs)2, uma classe de transdutores de Micro Electro-Mechanical System (MEMS), fabricadas em silicone. Em particular, MUTs capacitivo (CMUTs) finalmente chegaram a uma maturidade tecnológica que os torna uma alternativa válida para transdutores piezoelétricos para próxima geração ultra-som sistemas de imagem3. CMUTs são muito atraentes devido a sua compatibilidade com tecnologias de microeletrônica, largura de banda larga – que produz uma maior resolução de imagem – alta eficiência térmica e, acima de tudo, sensibilidade elevada4. No contexto do projeto ENIAC JU DeNeCoR (dispositivos para NeuroControl e Neuroreabilitação)5, sondas CMUT estão sendo desenvolvidos6 para o cérebro dos EUA aplicativos (por exemplo, neurocirurgia), de imagem, onde a alta qualidade imagens 2D/3D/4D e Represtação precisa de estruturas cerebrais são necessários.
No processo de desenvolvimento de novas sondas de E.U., a possibilidade de executar avaliações de início do desempenho de imagem é fundamental. Técnicas de avaliação típica envolvem medir parâmetros específicos, como resolução e contraste, com base em imagens de fantasmas imitando tecido com alvos incorporados de geometria conhecida e ecogenicidade. Uma análise mais realista com alvos de imagens específicas do aplicativo pode ser extremamente valiosa para uma avaliação inicial do desempenho esperado dos E.U. sondas em sua aplicação potencial em um campo clínico específico. Por outro lado, a repetibilidade completa das aquisições é fundamental para testes comparativos de diferentes configurações ao longo do tempo, e este requisito exclui na vivo experiências completamente.
Vários trabalhos na literatura sobre técnicas de diagnóstico de imagem propuseram o uso de ex vivo espécimes animais7, cadáver cérebros8ou tecido imitando os phantoms9 para finalidades diferentes10, que inclui o teste de métodos de imagem, algoritmos de registro, sequências de ressonância magnética (RM) ou o feixe dos EUA-padrão e resultando a qualidade da imagem. Por exemplo, no contexto da imagem latente do cérebro, Lazebnik et al 7 usado um cérebro de ovelha fixada em formol para avaliar um método de registro Sr 3D novo; da mesma forma, Choe et al 11 investigou um procedimento para o registo do Sr e imagens de microscopia de luz de um cérebro de macaco coruja fixo. Um fantasma de cérebro álcool polivinílico (PVA) foi desenvolvido em9 e usado para realizar aquisições de imagem multimodal (ou seja, senhor, dos EUA e tomografia computadorizada) para gerar uma imagem compartilhada dataset12 para o teste de registro e algoritmos de geração de imagens.
Em geral, estes estudos confirmam que o uso de uma meta realista para aquisições de imagem é realmente um passo essencial durante o desenvolvimento de uma nova técnica de imagem. Isto representa um estágio mais crítico ao projetar um novo dispositivo de imagem, como a sonda CMUT nos apresentado neste trabalho, que está ainda em fase de prototipagem e precisa de extensa e reprodutíveis testes ao longo do tempo, para um ajuste exato de todo o projeto parâmetros antes de sua realização final e possível validação em aplicações na vivo (como em13,14,,15).
O protocolo experimental descrito neste trabalho foi concebido, portanto, prever um procedimento de avaliação de imagem robusta, específicos do aplicativo recém-desenvolvidos E.U. sondas baseadas na tecnologia CMUT. Para garantir tanto realismo e repetibilidade, bovina cérebros (obtidos por meio da padrão alimentar comercial a cadeia de suprimento), fixados em formalina foram escolhidos como alvos de imagem. O procedimento de fixação garante a preservação a longo prazo das características do tecido mantendo satisfatórias qualidades morfológicas e propriedades de visibilidade em ambos os EUA e o Sr. imagem latente de16,17.
O protocolo para a avaliação da qualidade da imagem dos EUA aqui descrito também implementa um recurso emprestado de neuronavigation técnicas utilizadas para neurocirurgia15. Em tais abordagens, E.U. sondas são conectadas a um sistema que fornece a posição espacial e dados de orientação em tempo real de rastreamento de movimento. Desta forma, EUA imagens adquiridas durante atividades cirúrgicas podem ser automaticamente registradas e visualizadas, para orientação, em superposição pré-operatório senhor imagens do cérebro do paciente. Para os fins do protocolo apresentado, a superposição com imagens do senhor (que são considerados como o padrão ouro em imagens do cérebro) é de grande valor, uma vez que permite que especialistas humanos avaliar visualmente que morfológica e características de tecido são reconhecíveis em as imagens dos EUA e, vice versa, para reconhecer a presença de artefatos de imagem.
A possibilidade de comparar imagens adquiridas com diferentes sondas de US se torna ainda mais interessante. O protocolo experimental apresentado inclui a possibilidade de definir um conjunto de poses de referência espacial para aquisições dos Estados Unidos, focadas em regiões mais característica-rico volume identificadas em uma inspeção visual preliminar das imagens do senhor. Uma ferramenta visual integrada, desenvolvida para o Paraview aberto fonte software sistema18, fornece orientações aos operadores para combinar essas poses predefinidos durante as fases de aquisição de imagem dos EUA. Para os procedimentos de calibração exigidos pelo protocolo, é fundamental para equipar todos os espécimes de alvo – biológicos ou sintéticos – com Marcos posição predefinida que fornecem referências espaciais sem ambiguidades. Tais pontos de referência devem ser visível em imagens tanto EUA como Senhor e fisicamente acessível para medições feitas com o sistema de rastreamento de movimento. Os elementos do Marco escolhido para o experimento são pequenas esferas de vidro Flint, cuja visibilidade nas imagens tanto EUA como deputado foi demonstrada na literatura19 e confirmada por varreduras de EUA e senhor preliminares realizadas antes das experiências apresentadas.
O protocolo apresentado se baseia o ultra-som avançado abre plataforma (ULA-OP)20, uma investigação completa e aberta e sistema de desenvolvimento para nós aquisição de imagem, que oferece muito mais amplo experimentais possibilidades que comercialmente disponíveis scanners e serve como uma base comum para a avaliação dos diferentes sondas dos EUA.
Em primeiro lugar, os instrumentos utilizados neste trabalho são descritos, com especial referência para recém-projetado sonda CMUT. O protocolo experimental é introduzido em detalhe, com uma descrição detalhada de todos os procedimentos envolvidos, desde a concepção inicial de calibração do sistema, de pós-processamento e aquisição de imagem. Finalmente, as imagens obtidas são apresentadas e os resultados são discutidos, juntamente com sugestões para futuros desenvolvimentos deste trabalho.
Instrumentação
Protótipo de sonda CMUT
Os experimentos foram realizados utilizando um recém-desenvolvido 256-elemento CMUT matriz linear protótipo, projetado, fabricado e embalado no laboratório Acoustoelectronics (ACULAB) da Universidade de Roma Tre (Roma, Itália), usando o processo de fabricação reversa CMUT ( RFP)4. RFP é um microfabrication e embalagem tecnologia, especificamente concebida para a realização de transdutores de MEMS para nos aplicativos, segundo a qual a microestrutura CMUT é fabricada no seguinte de silício de imagem de uma “invertida” abordagem21. Em comparação com outras tecnologias de fabricação de CMUT, RFP rende para melhorar o desempenho de imagem devido a alta uniformidade da geometria das células CMUT ao longo de todo o array e ao uso de materiais de engenharia acústica no pacote de cabeça de sonda. Uma característica importante do RFP é que as almofadas de interconexão elétricas estão localizadas na parte traseira do morrer CMUT, que facilita a 3D-integração de matrizes 2D e front-end multi-canal de eletrônicos.
A matriz CMUT 256-elemento foi projetada para operar em uma faixa de frequência centrada em 7,5 MHz. Um pitch de elemento de 200 µm foi escolhido para a matriz, resultando em uma largura de campo de visão máxima de 51,2 mm. A altura dos elementos da matriz única do CMUT foi definida para obter um desempenho adequado em termos de resolução lateral e capacidade de penetração. Uma altura de elemento de matriz de 5 mm foi escolhida a fim de obter uma largura de feixe de-3 dB de 0,1 mm e profundidade de foco de 1,8 mm de 7,5 MHz,-3 dB quando o foco da elevação de fixação a uma profundidade de 18 mm, através de uma lente acústica. 195 elementos de matriz de todo o µm obtiveram-se organizando e eletricamente conectando em paralelo 344 células CMUT circulares, seguindo um layout hexagonal. Consequentemente, a resultante 5 µm-elemento de distância, ou seja, do corte, coincide com a separação de membrana-para-membrana. Uma representação esquemática da estrutura de uma matriz CMUT é relatada na Figura 1.
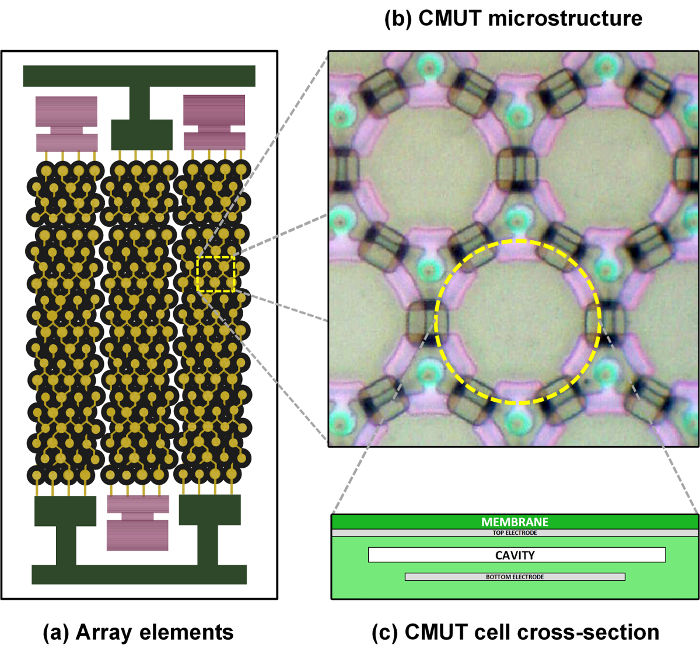
Figura 1: estrutura de matriz CMUT. Representação esquemática da estrutura de uma matriz CMUT: matriz de elementos compostos de várias células ligadas em paralelo (um), layout da microestrutura CMUT (b); seção transversal de uma célula CMUT (c). Clique aqui para ver uma versão maior desta figura.
O CMUT microfabrication parâmetros, ou seja, a lateral e verticais dimensões da placa e eletrodos, foram definidos usando simulações de modelagem de elemento finito (FEM) com o objectivo de obter uma operação de imersão de banda larga, caracterizada por uma resposta de frequência centrada em 7,5 MHz e uma 100%-6 dB bidirecional fracionária de largura de banda. A altura da cavidade, ou seja, o fosso, foi definida para atingir uma tensão de colapso de 260 V para maximizar a sensibilidade nos dois sentidos, com o CMUT a 70% do colapso tensão4, considerando uma tensão de sinal de excitação máxima V 80 de polarização. A tabela 1 resume os principais parâmetros geométricos do microfabricated CMUT.
| Parâmetros de projeto de matriz CMUT | |
| Parâmetro | Valor |
| Matriz | |
| Número de elementos | 256 |
| Arremesso de elemento | 200 µm |
| Comprimento do elemento (elevação) | 5 mm |
| Foco fixo de elevação | 15 mm |
| Microestrutura CMUT | |
| Diâmetro da célula | 50 µm |
| Diâmetro do eletrodo | 34 µm |
| Distância lateral de célula para célula | 7,5 µm |
| Espessura da placa | 2,5 µm |
| Altura do Gap | 0,25 µm |
Tabela 1. Parâmetros de sonda CMUT. Parâmetros geométricos da sonda linear-matriz CMUT e microestrutura de célula CMUT.
O processo de embalagem utilizado para integrar a matriz CMUT na cabeça sonda é descrito na referência4. A lente acústica foi fabricada usando uma borracha de silicone de temperatura vulcanizada (RTV) dopada com nanopós de óxido metálico para corresponder à impedância acústica da água e evitar reflexos espúrios para a interface de22. O composto resultante foi caracterizado por uma densidade de 1280 kg/m3 e uma velocidade de som de 1100 m/s. Um raio de curvatura de 7 mm foi escolhido para a lente cilíndrica, levando a um enfoque geométrico de 18 mm e espessura máxima de aproximadamente 0,5 mm acima da superfície do transdutor. Uma foto da cabeça CMUT sonda é mostrada na Figura 2(a).
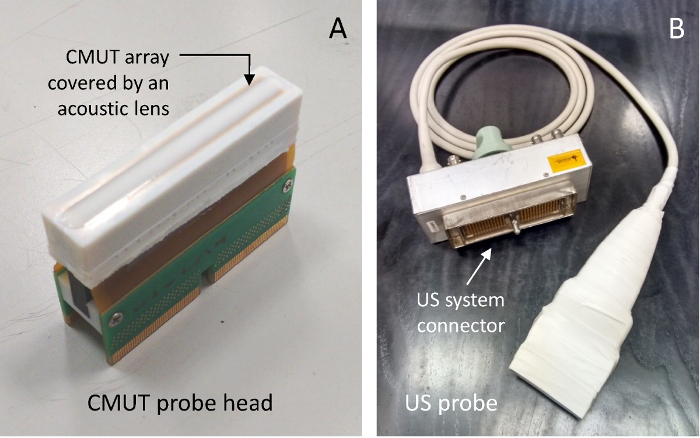
Figura 2: sonda CMUT. Cabeça da sonda CMUT desenvolvida, incluindo a matriz linear de transdutores e lente acústica (um), e a sonda CMUT completa com conector (b). Clique aqui para ver uma versão maior desta figura.
A cabeça de sonda CMUT foi acoplada para o identificador de sonda contendo eletrônica de front-end analógico multicanal recepção e um cabo multipolar para a conexão ao scanner dos EUA. O circuito eletrônico do canal único é um alta impedância de entrada 9 dB ganho tensão amplificador que fornece a corrente elétrica necessária para conduzir a impedância do cabo. A eletrônica multicanal, descrita na referência 4, baseia-se em uma topologia de circuito, incluindo um receptor de baixo ruído ultrabaixo-poder e um switch integrado para a duplexação de sinal de transmissão/recepção. Fonte de alimentação eletrônica front-end e a tensão de polarização de CMUT são gerados por uma fonte de alimentação personalizado e alimentados à sonda através do cabo multipolar. A sonda completa é mostrada na Figura 2(b).
Sondas de E.U. piezoelétricas
Para comparação qualitativa das imagens obtidas com a sonda CMUTacima, duas sondas de E.U. piezoelétricas comercialmente disponíveis foram incluídas nos experimentos. O primeiro é uma sonda linear-matriz com 192 transducing elementos, um arremesso de 245 µm e uma largura de banda fracionário 110% centrado em 8 MHz. Esta sonda foi usada para adquirir imagens 2D modo-B. A segunda sonda é uma sonda para a imagem em 3D com uma matriz linear mecanicamente varrida de 180 transducing elementos, com um arremesso de 245 µm e uma largura de banda fracionário 100% centrado em 8,5 MHz. Um motor de passo colocado dentro da sonda permite varrer a matriz linear para adquirir vários aviões, que podem ser usados para reconstruir uma imagem 3D da digitalizados volume23de habitação.
Sistema de ULA-OP
A aquisição de imagens dos Estados Unidos foi realizada empregando o ULA-OP sistema20, que é uma completo e aberto investigação e desenvolvimento sistema americano, concebido e realizado no laboratório de Design de sistemas de microeletrônica da Universidade de Florença, Itália. O sistema de ULA-OP pode controlar, tanto na transmissão (TX) e recepção (RX), até 64 canais independentes ligados através de uma matriz de interruptor uma sonda dos EUA com até 192 piezoelétricos ou CMUT transdutores. As sistema arquitetura características dois processamento principal placas, uma placa analógica (AB) e uma câmara Digital (DB), ambos contidos em um rack, que são concluídos por um quadro de alimentação e uma placa de costas-plano que contém o conector da sonda e todo o roteamento interno componentes. O AB contém o front-end para os transdutores de sonda, em particular os componentes electrónicos para o condicionamento analógico de 64 canais e a matriz de interruptor programável que mapeia dinamicamente os canais TX-RX para transdutores. O DB é responsável por beamforming em tempo real, sintetizando os sinais de TX e o RX de processamento ecoam para produzir a saída desejada (por exemplo imagens de modo-B ou ultra-som Doppler). Vale destacar que o sistema de ULA-OP é totalmente configurável, daí o sinal em TX pode ser qualquer forma de onda arbitrária dentro da largura de banda do sistema (por exemplo, os pulsos de três níveis, seno-rajadas, silvos, códigos de Huffman, etc.) com um máximo amplitude de 180 Vpp; Além disso, a estratégia de beamforming pode ser programada de acordo com os padrões mais recentes com foco (por exemplo, focado onda, linha de transmissão, onda plana, divergindo ondas, feixes de difração limitada, etc.)24,25 . No nível do hardware, essas tarefas são compartilhadas entre cinco campo Programmable Gate Arrays (FPGAs) e um processador de sinal Digital (DSP). Com mecanicamente-varrido de imagem 3D sondas, como o descrito acima, o sistema OP-ULA também controla o motor de passo dentro da sonda, para aquisição sincronizada de quadros 2D individuais em cada posição da matriz do transdutor.
O sistema de ULA-OP pode ser re-configurado em tempo de execução e adaptado às diferentes sondas dos EUA. Comunica-se através de um canal USB 2.0 com um computador host, equipado com uma ferramenta de software específico. O último tem uma interface gráfica configurável que fornece a visualização em tempo real de imagens dos Estados Unidos, reconstruída em vários modos; com sondas volumétricas, por exemplo, duas imagens de modo-B de aviões perpendiculares no volume digitalizado podem ser exibidas em tempo real.
A principal vantagem do sistema de ULA-OP para os fins do protocolo descrito é o que permite um fácil ajuste dos parâmetros de TX-RX e oferece acesso completo aos dados coletados em cada etapa do processamento de cadeia26, também tornando possível sinal para testar novas modalidades de imagem e beamforming técnicas27,28,29,30,31,32,33.
Sistema de rastreamento de movimento
Para gravar os EUA sonda posição durante a aquisição de imagens, um movimento óptico, sistema de rastreamento foi empregada34. O sistema é baseado em uma unidade de sensor que emite luz infravermelha através de dois iluminadores ((LEDs) de diodos emissores de luz) e usa dois receptores (ou seja, uma lente e um dispositivo de carga acoplada (CCD)) para detectar a luz refletida por vários passivo de propósito específico marcadores dispostos em formas rígidas predefinidas. Informações sobre luz refletida é então processadas por uma CPU de bordo para calcular dados de posição e a orientação, que podem ser transferidos para um computador host conectado via USB 2.0. O mesmo link pode ser usado para controlar a configuração da unidade de sensor.
A unidade de sensor navios juntamente com um conjunto de ferramentas, cada um dotado de quatro marcadores reflexivo disposto em uma configuração geométrica rígida. O sistema de rastreamento de movimento pode controlar até seis ferramentas rígidas distintas simultaneamente, em uma frequência de trabalho de aproximadamente 20 Hz. Duas dessas ferramentas foram usados para estes experimentos: uma ferramenta de ponteiro, que permite adquirir a posição 3D tocado por sua ponta, e uma ferramenta grampo-equipado, que pode ser anexada à sonda E.U. sob teste (ver Figura 14).
No lado do software, o rastreador de movimento possui uma interface de programação de aplicativo serial de baixo nível (API) para ambos unidade controle e aquisição de dados, que pode ser acessado via USB. Por padrão, posição e orientações são retornadas como itens de entradas múltiplas, ou seja, uma entrada por cada ferramenta sendo controlada. Cada entrada contém uma posição 3D (x, y, z) expressado em milímetros e uma orientação (q0, qx, q,y, qz) expressado como um quaternion. O sistema também vem com uma caixa de ferramentas de instrumentos de software de alto nível, que inclui uma ferramenta de acompanhamento gráfico para visualização e medição em tempo real as posições/orientações de várias ferramentas dentro do campo de visão da unidade do sensor.
Componentes de software, integração e visão geral do sistema
O diagrama na Figura 3 resume a instrumentação adotada para o protocolo, também descrevendo o fluxo de dados que flui entre os sistemas.
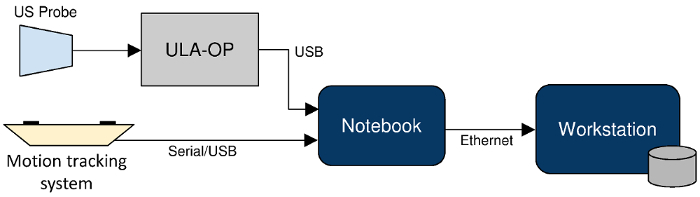
Figura 3: diagrama de blocos da integração de sistema e instalação de hardware todo. A sonda dos EUA é conectada ao sistema de ULA-OP que se comunica através de USB com o notebook para aquisição de imagens dos Estados Unidos. Ao mesmo tempo, o notebook também é ligado via USB para o sistema, para aquisição de dados de posição, movimento e via Ethernet na estação de trabalho, processamento de dados. Clique aqui para ver uma versão maior desta figura.
Além das sondas dos EUA, o rastreador de movimento e o sistema de ULA-OP, que têm sido descritos acima, a instalação também inclui dois computadores, ou seja, um caderno e uma estação de trabalho. O primeiro é o principal front-end para instrumentação, recebendo e sincronizando os dois fluxos de dados entrada principal: as imagens dos EUA provenientes do sistema ULA-OP e o posicionamento de dados desde o rastreador de movimento 3D. Ele também fornece um feedback visual ao operador para as imagens incorporadas. A estação de trabalho tem substancialmente maior capacidade de armazenamento e poder computacional. Ele fornece suporte de retaguarda para pós-processamento de imagem e um repositório para os conjuntos de dados de imagem combinados. A estação de trabalho também é usadapara a visualização de imagens dos EUA e senhor, incluindo a possibilidade de visualização 3D simultânea de imagens multimodais registradas.
Um requisito fundamental para os experimentos de aquisição de imagem é a sincronização com os dois fluxos de dados principal. O rastreamento de movimento e sistemas de ULA-OP são instrumentos independentes que ainda não suportam uma sincronização explícita das atividades. Devido a isto, as informações de posição e dados de imagem dos EUA precisa ser devidamente combinados para detectar a correta posição 3D da sonda dos EUA na época cada fatia da imagem foi adquirida. Para este efeito, um aplicativo de registro específico foi desenvolvido para gravação e carimbo de hora em tempo real dos dados fornecidos pelo movimento de rastreamento sistema, modificando-se um componente de software C++ que é incluído, neste caso, no controlador de movimento em si. Normalmente, sistemas de rastreamento de movimento apresentam uma API de nível inferior que permite a captura de dados em tempo real e transcrevendo-os para um arquivo.
O método de sincronização adotado funciona da seguinte maneira. Cada entrada no arquivo produzido pelo log de aplicativo é aumentada com um carimbo de hora no formato “AAAA-MM-ddThh:mm:ss.kkk”, onde: y = ano, M = mês, d = dias, h = horas, m = minuto, s = segundo, k = milissegundos. O software baseado em PC de ULA-OP (linguagens de programação C++ e MATLAB) calcula o inicial e final do tempo de cada sequência de aquisição de imagem e armazena essas informações em cada imagem em formato de .vtk. Para fornecer uma referência temporal comum durante as experiências, ambos os procedimentos acima do software são executados no computador front-end na Figura 3. Timestamps produzidos desta forma são usados pelos procedimentos do software de pós-processamento que produzem o dataset final (Veja o protocolo, seção 8).
Outro componente de software específico foi realizado e executado na estação de trabalho para fornecer feedback em tempo real para o operador, comparando o atual EUA sonda de posição para imagens do senhor e, em particular, o conjunto de posições predefinidas. Uma rotina de software de servidor em Python processa o arquivo de log do rastreador de movimento, traduz o atual EUA sonda posição em uma forma geométrica e envia os dados para um servidor Paraview. Um cliente Paraview conecta-se ao mesmo servidor Paraview e em tempo real exibe a posição da forma geométrica, sobreposta em uma imagem do senhor e de mais formas geométricas descrevendo as poses predefinidas. Um exemplo da visualização em tempo real resultante é mostrado na Figura 17.
