Den ökande marknaden för små och bärbara ultraljud (US) skannrar leder till utveckling av nya echographic sonder i vilken del av signal-luftkonditionering och strålformning elektronik är integrerad i sonden handtaget, särskilt för 3D / 4D imaging 1. nya teknik särskilt lämpade för att uppnå denna höga nivå av integration omfattar Micromachined ultraljudssensorer (MUTs)2, en klass av Micro elektromekaniska System (MEMS) givare tillverkade på kisel. I synnerhet har kapacitiv MUTs (CMUTs) äntligen nått en teknisk mognad som gör dem ett giltigt alternativ till piezoelektrisk givare för nästa generation ultraljud imaging system3. CMUTs är mycket tilltalande på grund av deras förenlighet med mikroelektronik teknik, bred bandbredd – vilket ger en högre bildupplösning – hög termisk effektivitet och framför alla, hög känslighet4. I samband med ENIAC JU projektet DeNeCoR (enheter för NeuroControl och Neurorehabilitering)5, CMUT sonder blir utvecklade6 för US hjärnavbildning program (t.ex. neurokirurgi), där hög kvalitet 2D/3D/4 D bilder och korrekt bild av hjärnstrukturer krävs.
I utvecklingsprocessen av nya amerikanska sonder är möjlighet att utföra tidiga bedömningar av Leveransprovning grundläggande. Typiska bedömningsteknik innebära mäta specifika parametrar som upplösning och kontrast, baserat på bilder av vävnad-härma fantomer med inbäddade mål på känd geometri och echogenicity. Mer realistisk analys med programspecifika imaging mål kan vara oerhört värdefullt för en tidig utvärdering av prestanda hos US sonder i deras potentiella ansökan ett specifikt kliniskt område. Däremot, komplett repeterbarheten av förvärv är grundläggande för jämförande testning av olika konfigurationer över tid, och detta krav utesluter i vivo experiment helt och hållet.
Flera arbeten i litteraturen om diagnostisk bildteknik föreslås användning av ex vivo djur exemplar7, cadaver hjärnor8eller vävnad härma fantomer9 för olika ändamål10, som inkluderar den provning av avbildningsmetoder, registrering algoritmer, magnetresonans (MR) sekvenser eller US-ljusbilden och resulterande bildkvaliteten. Till exempel i samband med hjärnavbildning, Lazebnik et al. 7 används ett formalin-fast får hjärnan för att utvärdera en ny 3D herr registrering metod; Likaså, Choe o.a. 11 undersökte ett förfarande för registrering av herr och ljusmikroskopi bilder av en fast owl monkey hjärna. En polyvinylalkohol (PVA) hjärna phantom utvecklades i9 och används för att utföra multimodala bild förvärv (dvs. herr, USA, och datortomografi) för att generera en delad bild datamängd12 för testning av registrering och tänkbar algoritmer.
Sammantaget bekräftar dessa studier att användningen av ett realistiskt mål för bild förvärv verkligen är ett viktigt steg under utvecklingen av en ny bildteknik. Detta utgör en ännu mer kritiskt skede när du designar en ny bildenhet, som presenteras i detta papper, vilket är fortfarande i en prototyping fas och behöver omfattande och reproducerbar testning över tid, för en korrekt trimning av alla design CMUT oss sonden parametrar innan dess slutliga genomförande och möjliga validering i in-vivo -program (som i13,14,15).
Det experimentellt protokoll som beskrivs i detta arbete har utformats således att ge en robust, programspecifika imaging bedömningsförfarandet för nyutvecklade US sonder baserat på CMUT teknik. För att säkerställa både realism och repeterbarhet, bovin valdes hjärnor (erhålls genom vanlig mat-hela kommersiella leveranskedjan) fast i formalin som imaging mål. Förfarandet för fixering garanterar långsiktigt bevarande av vävnad egenskaper bibehållen tillfredsställande morfologiska egenskaper och synlighet boenden i både USA och MR imaging16,17.
Protokollet för bedömning av amerikanska bildkvalitet beskrivs här också genomför en funktion lånad från neuronavigation tekniker som används för neurokirurgi15. I sådana metoder, är US sonder anslutna till en motion tracking system som ger rumsliga position och orientering data i realtid. På detta sätt kan amerikanska bilder förvärvade under kirurgiska aktiviteter automatiskt registrerade och visualiseras, för vägledning, i överlagring pre-operatory herr bilder av patientens hjärna. För att protokollet presenteras, överlagring med herr bilder (som betraktas som den gyllene standarden inom hjärnavbildning) är av stort värde, eftersom den tillåter mänskliga experter för att visuellt bedöma vilka morfologiska och vävnad funktioner är igenkännligt i den amerikanska bilder och, vice versa, att erkänna förekomsten av imaging artefakter.
Möjlighet att jämföra bilder förvärvade med olika amerikanska sonder blir ännu mer intressant. Det experimentellt protokoll som presenteras omfattar möjligheten att definiera en uppsättning geografisk referens poser för US förvärv, inriktad på de mest funktionsrika volym regioner som identifierats i en preliminär okulärbesiktning av herr bilder. Ett integrerat visuella verktyg, utvecklat för Paraview öppen källkod programvara system18, ger vägledning till operatörer för att matcha sådana fördefinierade poser under US bild förvärv faser. För kalibrering förfaranden krävs av protokollet, är det grundläggande att utrusta alla target – antingen biologiska eller syntetiska – exemplar med fördefinierade position landmärken som ger otvetydiga rumsliga referenser. Sådana sevärdheter måste vara synliga i både USA och herr bilder och fysiskt tillgänglig för mätningar med motion tracking system. De valda landmark element för experimentet är små sfärer av glas, vars synlighet i både USA och herr bilder var visat i litteraturen19 och bekräftas av preliminära USA och herr genomsökningar utförs innan de presenterade experiment.
Protokollet presenteras förlitar sig på ultraljud avancerade öppna plattform (ULA-OP)20, en fullständig och öppen forskning och utvecklingssystem för oss bild förvärv, som erbjuder mycket bredare experimentella möjligheter än kommersiellt tillgängliga skannrar och fungerar som en gemensam grund för utvärdering av olika amerikanska sonder.
Först beskrivs de instrument som används i detta arbete, med särskild hänvisning till nydesignade CMUT sonden. Experimentprotokoll är introrade i detalj, med en grundlig beskrivning av alla förfarandena som är inblandade, från inledande design till systemet kalibrering, bild förvärv och efterbearbetning. Slutligen de erhållna bilderna presenteras och resultatet diskuteras, tillsammans med tips till framtida utveckling av detta arbete.
Instrumentation
CMUT sonden prototyp
Experimenten utfördes med en nyutvecklad 256-elementet CMUT linjär array prototyp, utformade, tillverkade och förpackade på den Acoustoelectronics laboratorium (ACULAB) av Roma Tre University (Rom, Italien), med hjälp av CMUT omvänd tillverkningsprocessen ( RFP)4. RFP är en mikrofabrikation och förpackningsteknik, särskilt tänkt för förverkligandet av MEMS-givare för oss imaging applikationer, whereby CMUT mikrostrukturen tillverkas kisel efter en ”uppochned” närmar sig21. Jämfört med andra CMUT fabrication teknik ger RFP förbättrad bildbehandling prestanda på grund av den hög jämnhet av CMUT cellernas geometri över hela matrisen och akustiskt konstruerade material i sonden huvud paketet. Ett viktigt inslag i RFP är att de elektriska samtrafik kuddar ligger på den bakre delen av CMUT die, vilket underlättar 3D-integration av 2D matriser och front-end Multi-Channel elektronik.
Arrayen 256-elementet CMUT var avsedd att verka i en centrerad på 7,5 MHz-bandet. En del tonhöjd 200 µm valdes för den array som resulterar i en bredd av 51,2 mm högst field-of-view. Höjden på de enda CMUT array-element definierades för att uppnå lämplig prestanda när det gäller laterala upplösning och penetration kapacitet. En 5 mm array element höjd valdes för att få en-3 dB strålbredd på 0,1 mm och -3 dB djup fokus 1,8 mm på 7,5 MHz, när fastställande höjd fokus på ett djup av 18 mm med hjälp av en akustisk lins. 195 µm-wide array-element erhölls genom att arrangera och elektriskt ansluta i parallella 344 cirkulär CMUT celler, efter en sexkantig layout. Därför matchar resulterande µm 5 element-till-element avståndet, dvs sågspåret, membran-till-membran separation. En schematisk representation av strukturen i en CMUT array redovisas i figur 1.
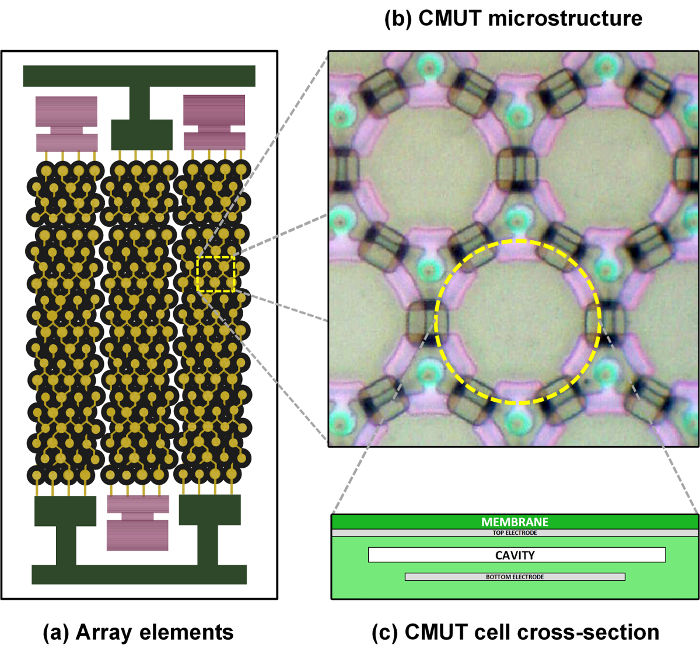
Figur 1: CMUT array struktur. Schematisk representation av strukturen i en CMUT array: array element som består av flera celler anslutna i parallella (a), layout av den CMUT mikrostruktur (b); tvärsnitt av en CMUT cell (c). Klicka här för att se en större version av denna siffra.
CMUT mikrofabrikation parametrar, dvs lateralen och vertikala dimensioner av plattan och elektroder, definierades med hjälp av Finita Element modellering (FEM) simuleringar med syftet att uppnå en bredband nedsänkning operation, kännetecknas av en Frekvensåtergivning centrerad på 7,5 MHz och en 100%-6 dB tvåvägs fraktionerad bandbredd. Höjden av kaviteten, dvs klyftan, definierades för att uppnå en kollaps spänning på 260 V att maximera tvåvägs känslighet, genom polarisering av CMUT på 70% av kollaps spänning4, överväger en 80 V högsta magnetiseringen signalspänning. Tabell 1 sammanfattar de geometriska parametrarna biochips CMUT.
| CMUT Array konstruktionsparametrar | |
| Parametern | Värde |
| Array | |
| Antal element | 256 |
| Elementet pitch | 200 µm |
| Elementet längd (höjd) | 5 mm |
| Fast höjd fokus | 15 mm |
| CMUT mikrostruktur | |
| Cell diameter | 50 µm |
| Elektroden diameter | 34 µm |
| Cell till cell lateralt avstånd | 7,5 µm |
| Plåttjocklek | 2,5 µm |
| Gap höjd | 0,25 µm |
Tabell 1. CMUT sonden parametrar. Geometriska parametrar för CMUT linjär-array sonden och CMUT cell mikrostruktur.
Förpackningsprocessen används för att integrera CMUT matrisen i en sond huvud beskrivs i referens4. Akustiska linsen var dikta ihop användande en rumstemperatur vulcanized (RTV) silikongummi dopade med metall-oxid nanopulver att matcha den akustiska impedansen vatten och undvika falska reflektioner på gränssnittet22. Den resulterande sammansatt präglades av en täthet av 1280 kg/m3 och en hastighet av solitt av 1100 m/s. En 7 mm radie av krökning valdes för cylindriska linsen, leder till geometriska fokus på 18 mm och en tjocklek av ca 0,5 mm ovanför givaren ytan högst. En bild av CMUT sonden huvudet visas i figur 2(a).
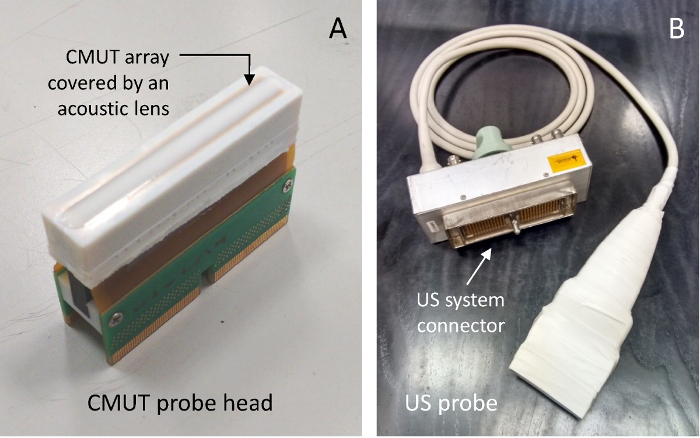
Figur 2: CMUT sond. Chef för utvecklade CMUT sonden, inklusive det linjära utbudet av givare och akustisk lins (en), och full CMUT sonden med connector (b). Klicka här för att se en större version av denna siffra.
CMUT sonden huvudet var kopplad till sonden handtaget som innehåller flerkanalsljud mottagning analog front-end elektronik och en flerpolig kabel för anslutning till US skannern. Den enda kanal elektroniska kretsen är en hög ingång impedans 9 dB-gain spänning förstärkare som ger elektriska nödvändig att köra kabel impedans. Den flerkanaliga elektronik, beskrivs i referens 4, bygger på en krets topologi inklusive en ultra-låg-power låg ljudnivå-mottagare och en integrerad omkopplare för att sända och ta emot signal dubbelsidig utskrift. Front-end elektronik strömförsörjningen och den CMUT bias spänningen är genereras av en anpassad strömförsörjningsenheten och utfodras till sonden via flerpolig kabel. Komplett sonden visas i figur 2(b).
Piezoelektriska US sonder
För kvalitativ jämförelse av bilder som erhållits med CMUT sondovan ingick två kommersiellt tillgängliga piezoelektriska US sonder i experimenten. Den första är en linjär-array sond med 192 transducing element, en 245 µm pitch och en 110% fraktionerad bandbredd centreras på 8 MHz. Denna sond användes att förvärva 2D B-läge-bilder. Andra sonden är en sond för 3D imaging med ett mekaniskt sopade linjära matris 180 transducing element, med en 245 µm pitch och en 100% fraktionerad bandbredd centreras högst 8,5 MHz. En stegmotor placerade inuti sonden bostäder möjliggör svepande linjär matrisen för att förvärva flera plan, som kan användas för att rekonstruera en 3D-bild av skannade volym23.
ULA-OP System
Förvärvet av amerikanska bilder genomfördes genom att anställa ULA-OP system20, som är en fullständig och öppen US forskning och utveckling system, utformat och insåg vid mikroelektronik system Design laboratorium från universitetet i Florens, Italien. ULA-OP systemet kan styra, både i sändning (TX) och mottagning (RX), upp till 64 oberoende kanaler ansluts via en switch matris till en US sonden med upp till 192 piezoelektriska eller CMUT givare. Systemet arkitekturen funktioner två huvudsakliga behandlingen styrelserna, en Analog styrelsen (AB) och en Digital styrelsen (DB), båda i ett rack, som kompletteras av en strömförsörjning och en baksida-plane halvpension som innehåller kopplingen sonden och all intern routning komponenter. AB innehåller front-end till sonden omvandlarna, i synnerhet den elektroniska komponenter för analoga villkora av de 64 kanalerna och programmerbara växel matrisen som mappar dynamiskt TX-RX kanalerna till omvandlarna. DB är ansvarig för realtid strålformning, ekon syntetisera TX signalerna och bearbetning RX för att producera önskad utdata (exempelvis B-mode bilder eller Doppler sonogram). Det är värt att betona att systemets ULA-OP är fullt konfigurerbara, därmed signalera i TX kan vara någon godtycklig vågform inom systemet bandbredd (t.ex. tre-nivå pulser, sinus-skurar, kvittrar, Huffman koder, etc.) med en maximal amplituden av 180 Vpp; Dessutom strategin strålformning kan programmeras enligt de senaste fokus mönsterna (t.ex. fokuserade våg, multi-fodra-överföring, plan våg, divergerande vågor, begränsad diffraktion balkar, etc.)24,25 . På maskinvarunivå delas dessa uppgifter bland fem Field Programmable Gate Arrays (FPGAs) och en Digital signalprocessor (DSP). Med mekaniskt svepte 3D imaging sonder, såsom beskrivs ovan, styr ULA-OP systemet också den stepper motorn inuti sonden, för synkroniserade förvärv av enskilda 2D ramar på varje position i givaren matrisen.
ULA-OP systemet kan konfigureras vid körning och anpassas till olika amerikanska sonder. Den kommunicerar via en USB 2.0 kanal med en värddator, utrustad med en särskild programvaruverktyg. Den senare har en konfigurerbar grafiska gränssnitt som ger realtid visualisering av amerikanska bilder, rekonstruerad i olika lägen; med volymetriska sonder, exempelvis kan två B-mode bilder av vinkelräta plan i skannade volymen visas i realtid.
Den största fördelen med ULA-OP systemet för tillämpningen av protokollet beskrivs är att det tillåter en lätt trimning av TX-RX parametrarna och erbjuder full tillgång till signal data insamlade vid varje steg i den bearbetning kedja26, också gör det möjligt att testa nya avbildningsmetoder och strålformning teknik27,28,29,30,31,32,33.
Motion tracking-system
Till post USA sond position under bild förvärv, en optisk motion tracking system var sysselsatta34. Systemet är baserat på en sensorenhet som avger infrarött ljus via två lampor (lysdioder (LEDs)) och använder två mottagare (dvs. en lins och en laddning – tillsammans enhet (CCD)) för att upptäcka ljuset reflekteras av flera ändamål-specifika passiv markörer som ordnade i fördefinierade stela former. Information om reflekterat ljus bearbetas sedan av en on-board CPU att beräkna både position och orientering data som kan överföras till en värddator som ansluts via USB 2.0. Samma länk kan användas för att kontrollera konfigurationen av enheten sensor.
Sensorenhet fartyg tillsammans med en uppsättning verktyg, var utrustad med fyra reflekterande markörer ordnade i en styv geometriska konfiguration. Förslaget spårningssystem kan spåra upp till sex distinkta stela verktyg samtidigt, en fungerande frekvens på cirka 20 Hz. Två sådana verktyg användes för dessa experiment: en pekverktyget, som gör att förvärva 3D position rörd av dess spets, och en clamp-utrustade verktyg, som kan kopplas till US sonden under test (se figur 14).
På mjukvarusidan har motion tracker ett lågaktivt seriell application programming interface (API) för både enheten kontroll och datainskaffning, som kan nås via USB. Som standard returneras position och orientering som Multi-Entry objekt, dvs en post per varje verktyg som spåras. Varje post innehåller en 3D-position (x, y, z) uttryckt i mm och orientering (q0, qx, qy, qz) uttryckt som en kvaternion. Systemet levereras också med en verktygslåda med högre nivå programvaruinstrument, som innehåller ett grafiskt spårning verktyg för att visualisera och mäta i realtid positioner/riktlinjerna från flera verktyg inom synfältet av sensorenhet.
Översikt, integration och programvara komponenter
Diagrammet i figur 3 sammanfattar instrumenteringen antog för protokollet, som också beskriver dataströmmen som rinner över systemen.
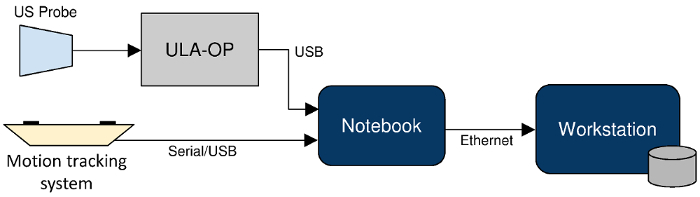
Figur 3: blockdiagram över den hela maskinvaruintegrering setup och systemet. Amerikanska sonden är ansluten till ULA-OP system som kommunicerar via USB med den bärbara datorn för USA bild förvärv. På samma gång, är den bärbara datorn också ansluten via USB till den motion tracking system, för position datainsamling, och via Ethernet till arbetsplats för databehandling. Klicka här för att se en större version av denna siffra.
Förutom de amerikanska sonderna, motion tracker och det ULA-OP-systemet, som har beskrivits ovan, omfattar inställningen också två datorer, nämligen en anteckningsbok och en arbetsstation. Förstnämnda är huvudsakligt front-end till instrumentation, ta emot och synkronisera de två huvudsakliga inkommande dataströmmarna: US bilderna kommer från systemets ULA-OP och 3D-positionering data från motion tracker. Det ger också en visuell feedback till operatören för bilderna överlåtande. Arbetsstationen har betydligt högre computational makt och lagring kapacitet. Det ger backend-stöd för bild efterbehandling och en lagringsplats för den kombinerade imaging datamängder. Arbetsstationen används ocksåför visualisering av USA och herr bilder, inklusive möjligheten till samtidiga 3D visualisering av registrerade multimodala bilder.
Ett avgörande krav för bild förvärv experiment är synkronisering av två huvudsakliga dataströmmar. De rörelsespårning och ULA-OP system är oberoende instrument som inte stöder ännu en explicit synkronisering av aktiviteter. På grund av detta behöver USA bild data och position information kombineras ordentligt för att upptäcka USA sonden rätt 3D ställning vid tidpunkten för varje bildsegment förvärvades. För detta ändamål utvecklats en specifik loggning program för inspelning och tidsstämplar i realtid den motion tracking system, genom att ändra en C++-programvarukomponent som ingår, i detta fall i rörelse tracker sig uppgifter. Motion tracking system har vanligtvis en lågnivå API som tillåter att fånga data i realtid och transkribera dem till en fil.
Den antagna synkroniseringsmetoden fungerar på följande sätt. Varje post i filen produceras av programmet loggning är förstärkt med en tidsstämpel i formatet ”ÅÅÅÅ-MM-ddThh:mm:ss.kkk”, där: y = år, M = månad, d = dagen, h = timmar, m = minut, s = andra, k = millisekund. ULA-OP PC-baserade programvaran (C++ och MATLAB programmeringsspråk) beräknar start- och sluttid för varje bildsekvens för förvärv och lagrar denna information i varje bild i .vtk format. För att tillhandahålla en gemensam tidsmässiga referens under experimenten, körs båda ovanstående programvara regler på frontdatorn i figur 3. Tidsstämplar som produceras på detta sätt används sedan av efterbearbetning programvara förfarandena som producerar den slutliga datamängden (se protokoll, avsnitt 8).
En annan specifik programkomponent var insåg och körs på arbetsstationen att ge realtid feedback till operatören, genom angående den nuvarande amerikanska sond ställning till herr bilder och, i synnerhet till uppsättningen fördefinierade poser. En server-side programvara rutin i Python processer loggfilen motion tracker, översätter den nuvarande amerikanska sond ställningstagande i en geometrisk form och skickar data till en Paraview server. En Paraview klient ansluter till samma Paraview server och i realtid visar positionen för den geometriska formen, överlagras på en MR-bild och att ytterligare geometriska former som beskriver de fördefinierade poserna. Ett exempel på den resulterande realtid visualiseringen visas i figur 17.
