Det voksende marked for lille og transportabel ultralyd (USA) scannere fører til udvikling af nye echographic sonder i hvilken del af signal-conditioning og ensrettere elektronik er integreret ind i sonden håndtaget, især til 3D / 4D scanning 1. nye teknologier især egnet til at opnå dette høje niveau af integration omfatter Micromachined ultralydstransducere (MUTs)2, en klasse af Micro elektro-mekanisk System (MEMS) transducere fabrikeret på silicium. Især har kapacitiv MUTs (CMUTs) endelig nået en teknologisk modenhed, der gør dem et gyldigt alternativ til piezoelektriske transducere til næste generation ultrasound imaging systems3. CMUTs er meget tiltalende på grund af deres kompatibilitet med mikroelektronik teknologier, bred båndbredde – hvilket giver en højere billedopløsning – høj termisk effektivitet og over alle, høj følsomhed4. I forbindelse med projektets ENIAC JU DeNeCoR (udstyr til NeuroControl og Neurorehabilitering)5, CMUT sonder er ved at blive udviklet6 for amerikanske brain imaging programmer (fx Neurokirurgi), hvor høj kvalitet 2D/3D/4 D billeder og nøjagtig repræsentation af hjernestrukturer er påkrævet.
I forbindelse med udvikling af nye amerikanske sonder er mulighed for at udføre tidlige vurderinger af billeddiagnostiske grundlæggende. Typiske vurdering teknikker indebærer måling af specifikke parametre som opløsning og kontrast, baseret på billeder af væv-efterligne phantoms med integrerede mål af kendte geometri og echogenicity. Mere realistisk analyse med applikationsspecifikke imaging mål kan være yderst værdifuldt til en tidlig vurdering af den forventede ydeevne af amerikanske sonder i deres potentielle anvendelse til en bestemt klinisk felt. På den anden side den komplette repeterbarhed af erhvervelser er grundlæggende til sammenlignende prøvning af forskellige konfigurationer over tid, og dette krav regler ud i vivo forsøg helt.
Flere værker i litteratur om diagnostiske Billeddannende teknikker foreslås anvendelse af ex vivo animalske prøver7, Kadaver hjerner8eller væv efterligne phantoms9 til forskellige formål10, som omfatter de afprøvning af Billeddannende metoder, registrering algoritmer, magnetisk resonans (MR) sekvenser eller amerikanske beam-mønster og resulterer billedkvalitet. For eksempel i forbindelse med brain imaging, Lazebnik et al. 7 anvendes en formalin-fast får hjernen til at vurdere en ny 3D hr. registrering metode; ligeledes Choe et al. 11 undersøgt en procedure for registrering af hr. og lysmikroskopi billeder af en fast ugle abe hjerne. En polyvinylalkohol (PVA) hjerne phantom blev udviklet i9 og bruges til at udføre multimodal billede erhvervelser (dvs. hr., USA, og beregnet tomografi) til at generere en delt billede datasæt12 til afprøvning af registrering og tænkelig algoritmer.
Samlet, disse undersøgelser bekræfter, at anvendelsen af et realistisk mål for billede erhvervelser er faktisk et vigtigt skridt under udviklingen af en ny Billeddannende teknik. Dette repræsenterer en endnu mere kritisk fase, når du udformer en ny billedenhed, som CMUT os sonden præsenteret i dette papir, som er stadig i prototype fase og har brug for omfattende og reproducerbare test over tid, for en præcis tuning af alle design parametre før den endelige realisering og muligt validering i i vivo applikationer (som i13,14,15).
Forsøgsplan beskrevet i dette arbejde er således designet til at give en robust, anvendelse-specifikke imaging vurderingsproceduren for nyligt udviklet US sonder baseret på CMUT teknologi. For at sikre både realisme og repeterbarhed, kvæg blev hjerner (opnået gennem den standard kommercielle fødevareforsyningskæden) fast i formalin valgt som imaging mål. Fiksering procedure sikrer langsigtet bevaring af væv egenskaber samtidig bevare tilfredsstillende morfologiske kvaliteter og synlighed egenskaber i både USA og hr. imaging16,17.
Protokol for vurdering af amerikanske billedkvalitet beskrevet her også gennemfører en funktion lånt fra neuronavigation teknikker anvendes for Neurokirurgi15. I sådanne tilgange, er amerikanske sonder tilsluttet en motion tracking system, der giver rumlige placering og orienteringsdata i realtid. På denne måde, kan amerikanske billeder erhvervet under kirurgiske aktiviteter være automatisk registreret og visualiseres, vejledning i superposition at pre-operatory hr. billeder af patientens hjerne. Med henblik på præsenteres protokollen superposition med hr. billeder (der betragtes som guldstandarden i brain imaging) er af stor værdi, da det giver mulighed for menneskelige eksperter at visuelt vurdere hvilke morfologiske og væv funktioner er genkendelige i Amerikanske billeder, og vice versa, at anerkende tilstedeværelsen af imaging artefakter.
Mulighed for at sammenligne billeder erhvervet med forskellige amerikanske sonder bliver endnu mere interessant. Forsøgsplan præsenteret omfatter muligheden for at definere et sæt af rumlige reference udgør kr. anskaffelser, fokuserede på de mest feature-rige volumen regioner identificeret i en indledende besigtigelse af hr. billeder. En integreret visuelt værktøj, udviklet til Paraview open source software system18, giver vejledning til operatører til at matche disse foruddefinerede udgør under kr. billede erhvervelse faser. Kalibreringsproceduren kræves ved protokollen, er det grundlæggende at udstyre alle mål enheder – enten biologisk eller syntetiske – med foruddefinerede holdning vartegn, der giver entydig rumlig referencer. Sådanne lokaliteter skal være synligt i både USA og hr. billeder og fysisk tilgængeligt for målinger, der foretages med motion tracking system. De valgte skelsættende elementer for eksperimentet er små kugler af Flint glas, hvis synlighed i både USA og hr. billeder blev demonstreret i litteraturen19 og bekræftet af foreløbige USA og hr. scanninger udføres før de præsenteres eksperimenter.
Protokollen præsenteret bygger på ultralyd Advanced åbne Platform (ULA-OP)20, en fuldstændig og åben forskning og udviklingssystem for os billede erhvervelse, som tilbyder meget bredere eksperimentelle muligheder end kommercielt tilgængelig scannere og fungerer som et fælles grundlag for evalueringen af forskellige amerikanske sonder.
Første gang, de instrumenter, der anvendes i dette arbejde er beskrevet, med særlig henvisning til det nydesignede CMUT sonde. En eksperimentel protokol er introceret i detaljer, med en grundig beskrivelse af alle de procedurer, der er involveret, fra indledende design til system kalibrering, image erhvervelse og efterbehandling. Endelig, de fremkomne billeder præsenteres og resultaterne drøftes, samt tips til den fremtidige udvikling af dette arbejde.
Instrumentering
CMUT probe prototype
Forsøgene blev udført ved hjælp af en nyudviklet 256-element CMUT lineær array prototype, designet, fremstillet og pakket på Acoustoelectronics laboratorium (ACULAB) af Roma Tre Universitet (Rom, Italien), ved hjælp af () CMUT vende fabrikationsproces RFP)4. RFP er en microfabrication og emballage teknologi, specielt udtænkt for realisering af MEMS transducere til os imaging applikationer, hvorved CMUT mikrostrukturen er fremstillet på silicium følgende en “upside-down” tilgang21. I forhold til andre CMUT fabrikation teknologi udbytter RFP til forbedret imaging ydeevne på grund af den høje ensartethed af de CMUT celler geometri over hele arrayet, og brugen af akustisk manipuleret materialer i pakken sonde hoved. Et vigtigt element af RFP er, at de elektriske samtrafik pads er placeret på den bageste del af CMUT dør, som letter 3D-integration af 2D arrays og front-end-multi-kanal elektronik.
256-element CMUT array var designet til at operere i en centreret på 7,5 MHz-frekvensbåndet. Et element pitch af 200 µm blev valgt for matrixen resulterer i maksimal field-of-view bredde 51,2 mm. Højden af de enkelte CMUT arrayelementer blev defineret for at opnå en passende ydeevne laterale opløsning og penetration formåen. En 5 mm array element højde blev valgt for at opnå-3 dB stråle bredde 0,1 mm og en-3 dB dybden af fokus på 1,8 mm på 7,5 MHz, når fastsættelse elevation fokus på en dybde på 18 mm med en akustisk linse. 195 µm-wide arrayelementer blev opnået ved at arrangere og elektrisk tilslutning i parallelle 344 cirkulære CMUT celler, efter en sekskantet layout. Følgelig matcher den resulterende 5 µm element for element afstand, dvs kerf, membran til membran adskillelse. En skematisk fremstilling af strukturen i en CMUT array er rapporteret i figur 1.
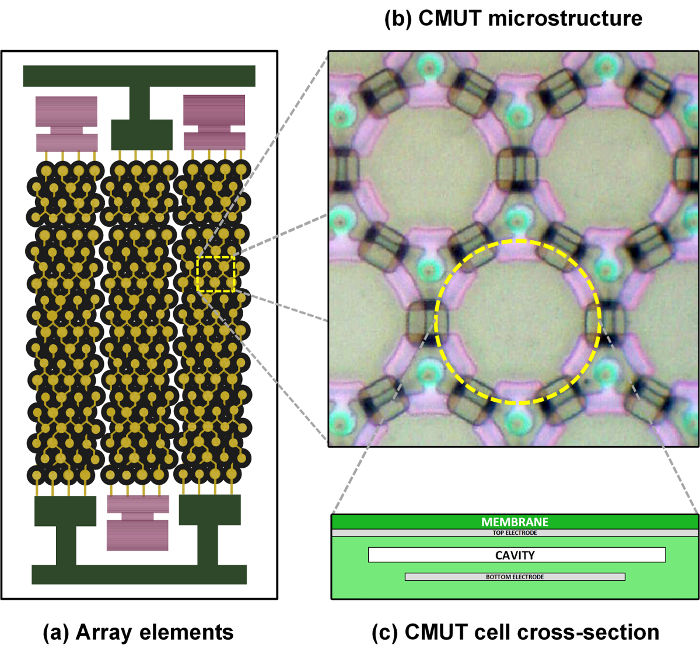
Figur 1: CMUT matrix struktur. Skematisk repræsentation af strukturen i en CMUT array: array elementer sammensat af flere celler forbundet parallel a, opstillingen af den CMUT mikrostruktur (b); tværsnit af en CMUT celle (c). Venligst klik her for at se en større version af dette tal.
Den CMUT microfabrication parametre, dvs tværgående og lodrette dimensioner af plade og elektroder, blev defineret ved hjælp af Finite Element modellering (FEM) simuleringer med henblik på at opnå en Bredbånd fordybelse operation, karakteriseret ved en frekvensgang centreret på 7,5 MHz og en 100%-6 dB tovejs fraktioneret båndbredde. Højden af hulrummet, dvs hullet, blev defineret for at opnå en sammenbrud spænding på 260 V at maksimere den tovejs-følsomhed, ved at påvirke CMUT på 70% af sammenbrud spænding4, overvejer en 80 V maksimal excitation signal spænding. Tabel 1 sammenfatter de vigtigste geometriske parametre af microfabricated CMUT.
| CMUT Array Design parametre | |
| Parameter | Værdi |
| Array | |
| Antallet af elementer | 256 |
| Element pitch | 200 µm |
| Element længde (højde) | 5 mm |
| Fast højde fokus | 15 mm |
| CMUT mikrostruktur | |
| Celle diameter | 50 µm |
| Elektrode diameter | 34 µm |
| Celle til celle lateral afstand | 7.5 µm |
| Pladetykkelse | 2,5 µm |
| Kløften højde | 0,25 µm |
Tabel 1. CMUT probe parametre. Geometriske parametre af CMUT lineære-array sonde og CMUT celle mikrostruktur.
Emballage processen bruges til at integrere CMUT array i en sonde hoved er beskrevet i reference4. Den akustiske linse var opdigtet benytter en stuetemperatur vulkaniseret (RTV) silikonegummi doteret med metal-oxid nanopowders til at matche den akustisk impedans af vand og undgå falske refleksioner på interface22. Den resulterende sammensatte var karakteriseret ved en tæthed af 1280 kg/m3 og en hastighed på lyden af 1100 m/s. En 7 mm krumning radius blev valgt til cylindrisk linse, fører til en geometrisk fokus på 18 mm og en maksimal tykkelse ca 0.5 mm over transducer overflade. Et billede af CMUT sonde hoved er vist i figur 2(a).
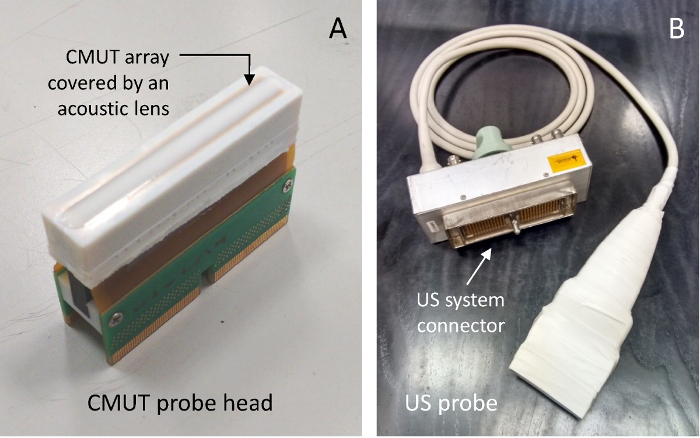
Figur 2: CMUT sonde. Lederen af den udviklede CMUT sonde, herunder den lineære vifte af transducere og akustisk linse (en), og den fulde CMUT probe med stik (b). Venligst klik her for at se en større version af dette tal.
CMUT probe hoved var koblet til sonde håndtaget indeholdende multikanals reception analog front-end-elektronik og en multipolær kabel for tilslutning til den amerikanske scanner. Enkelt kanal elektroniske kredsløb er en høj input-impedans 9 dB-forstærkning spænding forstærker, der giver elektrisk nuværende nødvendigt at køre kabel impedans. Multikanals elektronik, beskrevet i reference 4, er baseret på kredsløbskoblet topologi herunder en ultra lav power støjsvage receiver og en integreret switch til Send/modtag signal dupleksudskrivning. Front-end-elektronik strømforsyning og CMUT bias spænding er genereret af en brugerdefineret strømforsyning og fodres til sonde gennem den multipolære kabel. Komplet sonden er vist i figur 2(b).
Piezoelektriske amerikanske sonder
For kvalitativ sammenligning af billeder fås med CMUT sondeovenfor indgik to kommercielt tilgængelige piezoelektriske amerikanske sonder i forsøgene. Den første er en lineær array sonde med 192 transducing elementer, en 245 µm pitch og en 110% fraktioneret båndbredde centreret på 8 MHz. Denne sonde blev brugt til at erhverve 2D B-mode billeder. Den anden sonde er en sonde til 3D imaging med en mekanisk fejet lineær array af 180 transducing elementer, med en 245 µm pitch og en 100% fraktioneret båndbredde centreret på 8,5 MHz. En stepper motor placeret inde sonden boliger giver fejer den lineær array for at erhverve flere fly, som kan bruges til at rekonstruere et 3D billede af scannede bind23.
ULA-OP-systemet
Erhvervelse af amerikanske billeder blev udført ved at ansætte den ULA-OP system20, hvilket er en fuldstændig og åben amerikanske forsknings- og system, designet og realiseret på mikroelektronik systemer Design Laboratory på universitetet i Firenze, Italien. ULA-OP-systemet kan kontrollere, både i transmission (TX) og reception (RX), op til 64 uafhængige kanaler tilsluttet via en switch matrix til en US sonde med op til 192 piezoelektriske eller CMUT transducere. De ordning arkitektur funktioner to vigtigste behandling boards, en Analog Board (AB) og en Digital Board (DB), begge indeholdt i et rack, der er udfyldt af en strømforsyning bestyrelse og en back-plane bord, der indeholder sonde stik og alle interne routing komponenter. AB indeholder front-end til sonde transducere, i særdeleshed de elektroniske komponenter til analog konditionering af de 64 kanaler og de programmerbare switch matrix, der knytter dynamisk TX-RX kanaler til transducere. DB er ansvarlig for real-time ensrettere, ekkoer syntetisere TX signaler og forarbejdning RX til at producere de ønskede output (f.eks B-mode billeder eller Doppler sonograms). Det er værd at fremhæve at ULA-OP-systemet er fuldt konfigurerbar, dermed signal i TX kan være enhver vilkårlig bølgeform inden for systemet båndbredde (f.eks. tre niveauer pulser, sinus-byger, chirps, Huffman koder, osv.) med en maksimal amplituden af 180 Vpp; Derudover ensrettere strategi kan programmeres efter de seneste fokus mønstre (f.eks. fokuseret bølge, linje-transmission, flyet bølge, divergerende bølger, begrænset diffraktion bjælker, etc.)24,25 . På hardware-niveau, er disse opgaver fordelt mellem fem felt programmerbare Gate Arrays (FPGAs) og en Digital signalprocessor (DSP). Med mekanisk fejede 3D imaging sonder, som beskrevet ovenfor, styrer ULA-OP-systemet også stepper motor inde sonden til synkroniserede erhvervelse af individuelle 2D billeder på hver stilling på transducer-array.
ULA-OP-systemet kan re-konfigureret på kørselstidspunktet og tilpasset forskellige amerikanske sonder. Det kommunikerer gennem en USB 2.0 kanal med en værtscomputer, udstyret med en specifik softwareværktøj. Sidstnævnte har en konfigurerbar grafisk grænseflade, der giver real-time visualisering af amerikanske billeder, rekonstrueret i forskellige tilstande; med volumetriske sonder, for eksempel, kan to B-mode billeder af vinkelrette planer i den scannede volumen ses i realtid.
Den største fordel af ordningen ULA-OP til formål af den beskrevne protokol er at det giver mulighed for en let tuning af TX-RX parametre og det giver fuld adgang til signal data indsamlet på hvert trin i den forarbejdning kæde26, også gør det muligt at teste nye billeddiagnostiske modaliteter og ensrettere teknikker27,28,29,30,31,32,33.
Motion tracking system
Til post USA sonde holdning under image erhvervelse, en optisk bevægelsessporing system var ansat34. Systemet er baseret på en sensor enhed, der udsender infrarødt lys via to lysgivere (lysemitterende dioder (lysdioder)) og bruger to modtagere (dvs. en linse og et charge – sammen enhed (CCD)) til at registrere lyset reflekteres af flere formål-specifikke passiv markører arrangeret i foruddefinerede stive former. Oplysninger om reflekterede lys er derefter behandles af en on-board CPU til at beregne både placering og retning af data, som kan overføres til en værtscomputer, der er tilsluttet via USB 2.0. Samme link kan bruges til at styre konfigurationen af sensor enhed.
Sensor enhed leveres med et sæt af værktøjer, hver udstyret med fire reflekterende markører arrangeret i en stiv geometriske konfiguration. Motion tracking system kan registrere op til seks forskellige stive værktøjer samtidigt, på en arbejder frekvens af ca 20 Hz. To sådanne værktøjer blev brugt til disse eksperimenter: et Pegeværktøj, der tillader, at erhverve den 3D position rørt af dens spids, og en klemme-udstyret værktøj, der kan være knyttet til den amerikanske sonden under test (Se fig. 14).
I software side funktioner motion tracker en low-level seriel application programming interface (API) til begge enhed kontrol og dataopsamling, der kan tilgås via USB. Som standard, er holdning og retningslinjer tilbage som Multi-Entry elementer, dvs. én post pr. hvert værktøj at kunne spores. Hver post indeholder en 3D position (x, y, z) udtrykt i mm og en orientering (q0, qx, qy, qz) udtrykt i en kvaternion. Systemet leveres også med en værktøjskasse med højere niveau softwareinstrumenter, som indeholder et grafisk tracking værktøj til visualisering og måling i real-time holdninger/retninger af flere værktøjer inden for synsfeltet af sensor enhed.
Oversigt, integration og software komponenter
Diagrammet i figur 3 opsummerer instrumentering vedtaget for den protokol, der også beskriver den data-stream, der løber på tværs af systemerne.
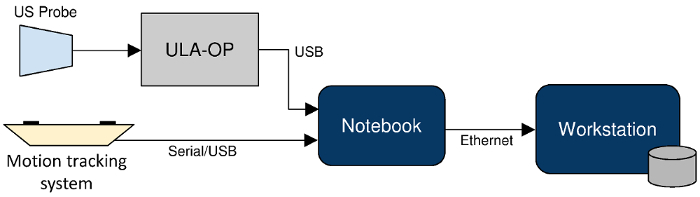
Figur 3: Blokdiagram af en hel hardware setup og system integration. Den amerikanske sonde er tilsluttet ULA-OP-systemet, som kommunikerer via USB med notebook for USA ‘s image erhvervelse. På samme tid, er arbejdsbog også forbundet via USB til motion tracking system for position datafangst, og via Ethernet til arbejdsstationen, for databehandling. Venligst klik her for at se en større version af dette tal.
Bortset fra de amerikanske sonder, motion tracker og ULA-OP-systemet, som er beskrevet ovenfor, indeholder opsætningen også to computere, nemlig en notesbog og en arbejdsstation. Førstnævnte er vigtigeste front-end til instrumentering, modtager og synkronisere de to vigtigste indgående data-streams: amerikanske billeder kommer fra ULA-OP-systemet og 3D positionering data fra motion tracker. Det giver også en visuel feedback til operatøren for de billeder, der erhverves. Arbejdsstationen har væsentligt højere beregningsmæssige kapacitet, magt og opbevaring. Det understøtter backend for billedet efterbehandling og en repository for den kombinerede imaging datasæt. Arbejdsstationen bruges ogsåfor visualisering af USA og hr. billeder, herunder muligheden for samtidige 3D visualisering af registrerede multimodale billeder.
En kritisk kravet om image erhvervelse eksperimenter er synkronisering af de to vigtigste datastreams. Bevægelsessporing og ULA-OP-systemer er uafhængige instrumenter, som endnu ikke understøtter en eksplicit synkronisering af aktiviteter. På grund af dette skal amerikanske image data og holdning oplysninger kombineres korrekt for at registrere den korrekte 3D position af amerikanske sonden dengang hver billede skive blev erhvervet. Til dette formål, har en specifik skovhugst program er udviklet til optagelse og tidsstemplings i realtid data leveret af motion tracking system, ved at ændre en C++ software-komponent, der er inkluderet i dette tilfælde i den bevægelse tracker, selv. Typisk, motion tracking systemer funktion en API på lavt niveau, der tillader opfange data i realtid og omskriver dem til en fil.
Den vedtagne metode virker som følger. Hver post i filen, der laves af applikationen logføring er udvidet med et tidsstempel i formatet “ÅÅÅÅ-MM-ddThh:mm:ss.kkk”, hvor: y = år, M = måned, d = dag, h = time, m = minut, s = andet, k = millisekund. ULA-OP PC-baseret software (C++ og MATLAB programmering sprog) beregner start- og sluttidspunkt for hvert billede erhvervelse sekvens og gemmer disse oplysninger i hvert billede i .vtk format. For at give en fælles tidsmæssig reference under forsøgene, er begge ovenstående software procedurerne udføres på front-end-computeren i figur 3. Tidsstempler, der er produceret på denne måde bruges derefter af efterbehandling software procedurerne, der producerer det endelige datasæt (se protokollen, afsnit 8).
En anden specifik softwarekomponent blev realiseret og køre på arbejdsstationen at levere real-time feedback til operatøren, ved vedrørende den nuværende amerikanske sonde holdning til hr. billeder og navnlig til sæt af foruddefinerede udgør. En server-side software rutine i Python processer bevægelse tracker logfil, omsætter den aktuelle amerikanske sonde position i en geometrisk figur, og sender data til en Paraview server. En Paraview klient opretter forbindelse til den samme server, Paraview og i real-time viser placeringen af den geometriske form, overlejret på en hr. billede og til yderligere geometriske figurer der beskriver de foruddefinerede udgør. Et eksempel på den resulterende real-time visualisering er vist i Figur 17.
